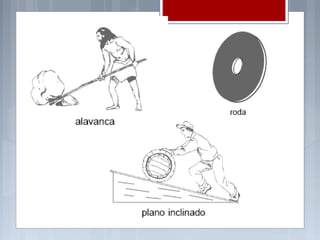
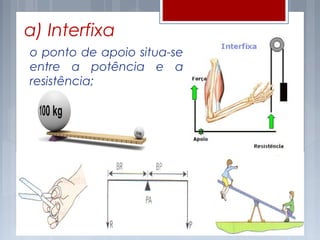
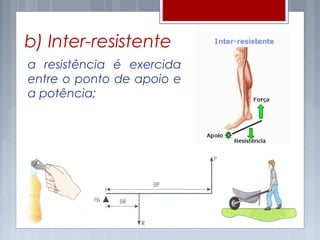
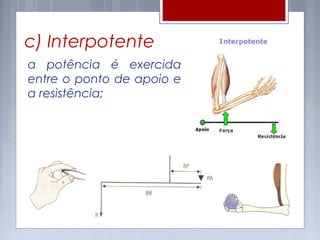
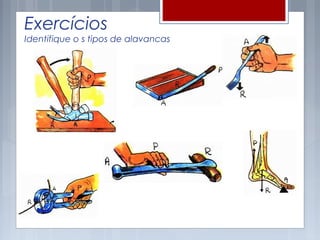
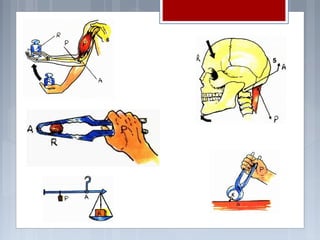
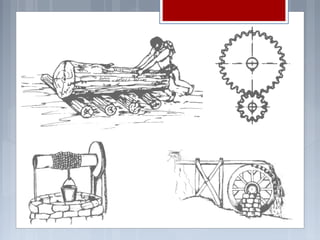
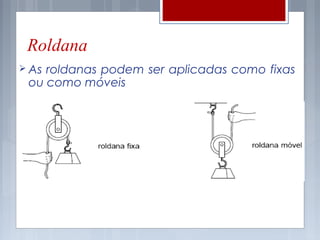
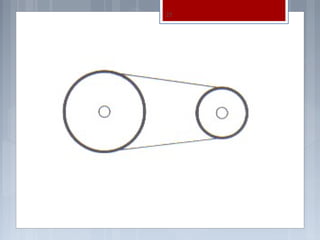
O documento descreve as máquinas simples, incluindo a alavanca, o plano inclinado e a roda. Essas máquinas foram criadas para facilitar o trabalho humano e otimizar a força aplicada. Detalha os três tipos de alavancas e como roldanas e polias funcionam como evoluções da roda para transmitir movimento com menos esforço.
















![Fontes de Energia [8 ano]](https://cdn.slidesharecdn.com/ss_thumbnails/energias-130827122328-phpapp01-150612150326-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)











![Aula de Física: Ondas e som [Ciências - EF - 9º Ano]](https://cdn.slidesharecdn.com/ss_thumbnails/ondasesom-161007010840-thumbnail.jpg?width=640&height=640&fit=bounds)







































