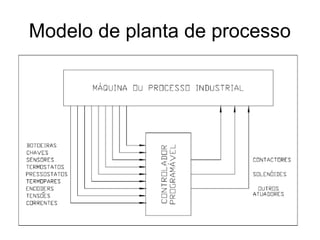
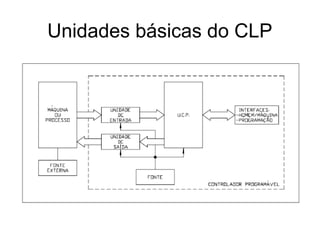
O documento descreve o que é um controlador lógico programável (CLP), sua história e evolução. Os CLPs foram desenvolvidos na década de 1960 para substituir painéis de relés e permitem transferir modificações de hardware para software. Os CLPs possuem vantagens como menor espaço, consumo e custo em comparação aos sistemas à base de relés.