O documento descreve o que são autómatos programáveis e sua funcionalidade, substituindo a lógica de relés por uma lógica armazenada em memória. Discutem as principais vantagens dos autómatos programáveis em relação aos painéis de relés, como redução de custos, facilidade de programação e configuração. Também menciona que a GM desenvolveu o primeiro autómato programável na década de 1960 para automatizar linhas de montagem.



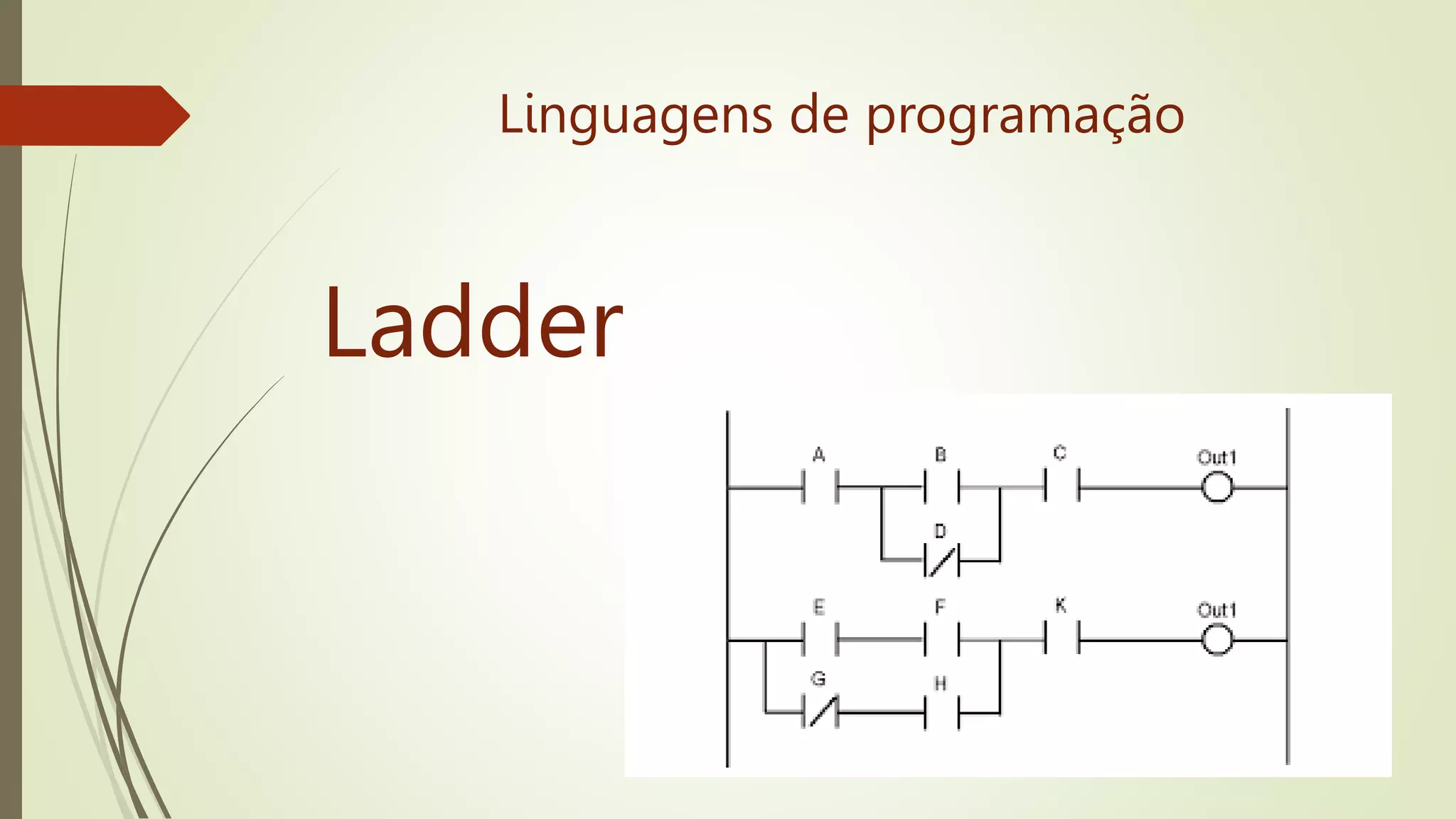
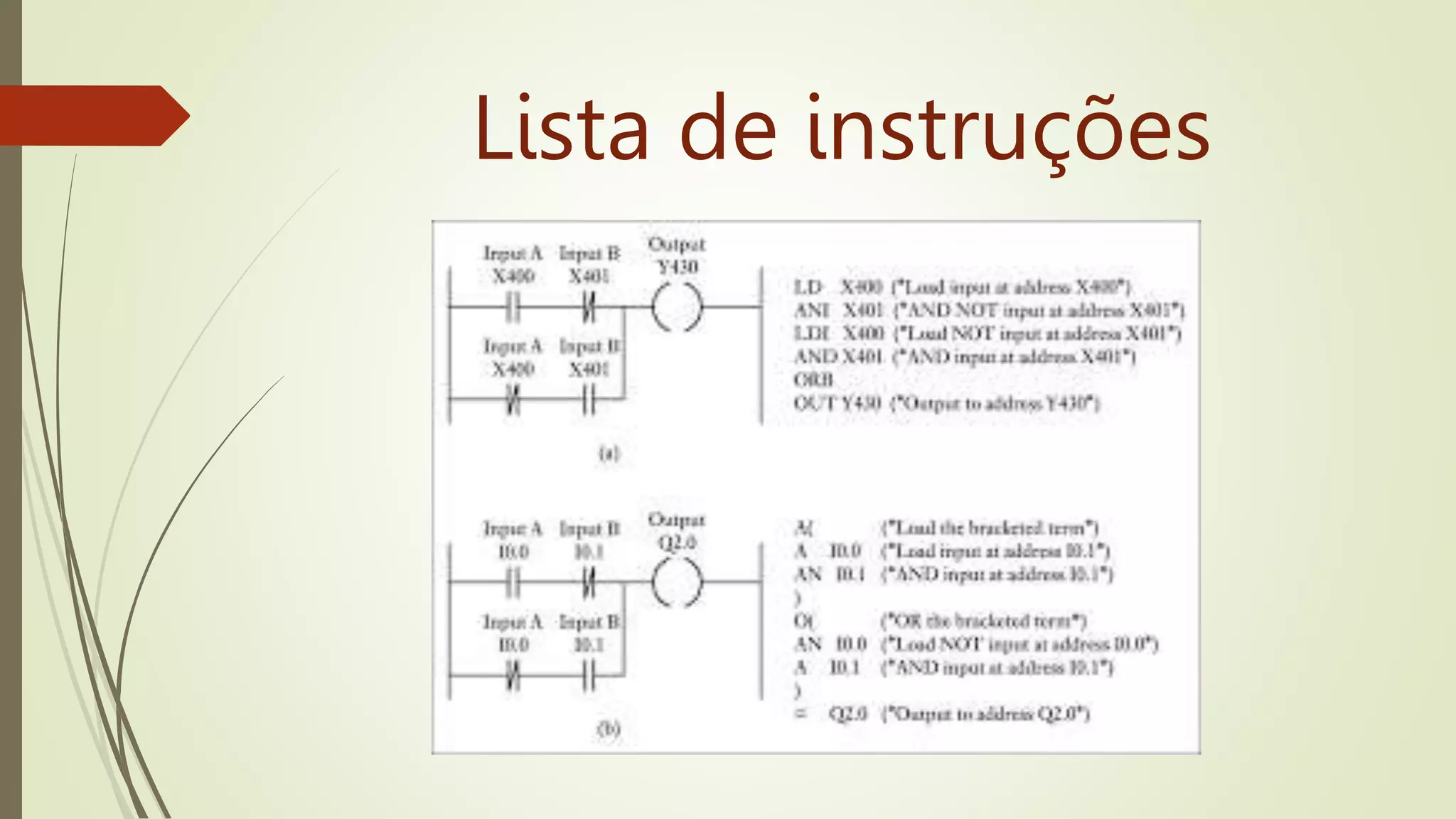
![Facilmente programável- as linguagens utilizadas (Ladder e Blocos de Funções[1], por
exemplo) são de fácil aprendizagem e utilização facilitando a construção da lógica de
controle.
Grande flexibilidade-em razão das linguagens utilizadas torna-se mais simples modificar a
lógica do processo.
Maior controle- por ser um equipamento microprocessado, traz ao usuário a facilidade de
interação com o hardware via software, assim se torna muito prática e fácil a localização de
falhas.](https://image.slidesharecdn.com/automatosprogramaveis1-230118112558-ae69c204/75/Automatos-Programaveis-1-pptx-6-2048.jpg)