Baixar para ler offline




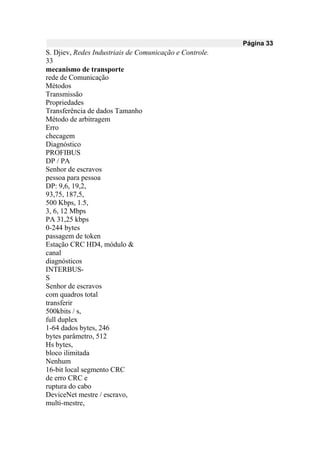
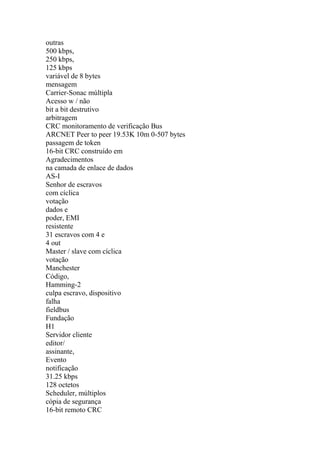
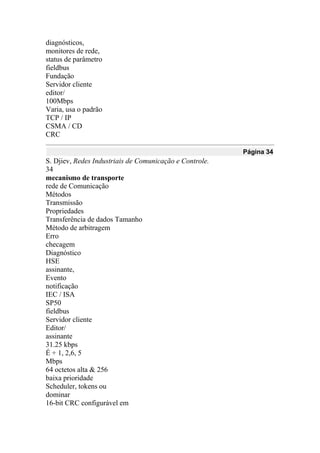
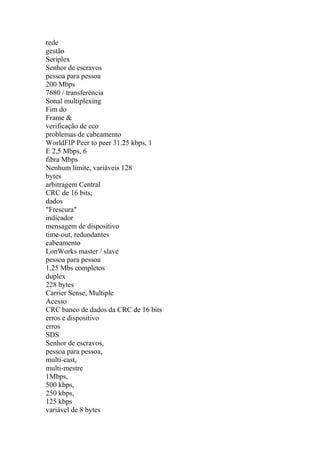




O documento discute as redes industriais de comunicação e controle. Ele fornece uma visão geral histórica da automação industrial e redes de comunicação, descrevendo como evoluíram de sistemas mecânicos e analógicos para sistemas digitais e distribuídos. Também descreve os diferentes níveis hierárquicos nas redes industriais, incluindo nível de campo, nível de controle e nível de supervisão.













































