
Recomendados
Mais conteúdo relacionado
Semelhante a Motores Indução Capítulo 4
Semelhante a Motores Indução Capítulo 4 (20)
Último
Motores Indução Capítulo 4
- 1. Cap. 4 – Motores de Indução Ementa detalhada Motivações para o estudo de máquinas de indução. Breve revisão. Características construtivas. Campo magnético girante. Princípio de funcionamento. Circuito equivalente. Obtenção dos parâmetros do circuito equivalente. Rendimento. Métodos para a limitação da corrente de partida em MI Motor de indução linear Comentários gerais Motor de indução monofásico Curiosidade.
- 2. Máquinas Elétricas Rotativas Máquinas elétricas fazem a interface entre um sistema mecânico e um sistema elétrico; O acoplamento entre os dois sistemas ocorre através do campo magnético; São denominadas máquinas CA quando ligadas a um sistema de corrente alternada; São denominadas máquinas CC quando ligadas a um sistema de corrente contínua;
- 3. Máquinas Elétricas Rotativas Máquinas CA são ditas: 1. Síncronas: quando a velocidade do eixo estiver em sincronismo com a freqüência da tensão elétrica de alimentação; 2. Assíncronas: quando a velocidade do eixo estiver fora de sincronismo (velocidade diferente) com a tensão elétrica de alimentação. Quando as correntes no rotor surgem somente devido ao efeito de indução (sem alimentação externa), a máquina é denominada de indução Máquinas de corrente contínua (CC), máquinas de indução (assíncrona) e máquinas síncronas representam os três maiores grupos com aplicações práticas;
- 4. Fotos
- 5. Máquina de Indução (MI ou Máquina Assíncrona) MI > 90% dos motores na indústria MI ~ 25% da carga elétrica brasileira Países industrializados – 40% a 70% da carga Máquina robusta, compacta e barata MI gaiola de esquilo – sem contato elétrico com parte girante Baixo requisito de manutenção Maior vida útil da máquina Motivações
- 6. Produção de um campo magnético. “Quando um condutor é percorrido por uma corrente elétrica surge em torno dele um campo magnético” Lei circuital de Ampère. n k k c i l d H 1 . i André-Marie Ampère Revisão (1/7)
- 7. Lei de Faraday. e fluxo Revisão (2/7) Michael Faraday Constatações: Ao se aproximar ou afastar o ímã do solenóide (bobina) ocorre um deslocamento do ponteiro do galvanômetro. Quando o ímã está parado, independentemente de quão próximo este esteja do solenóide, não há deslocamento do ponteiro do galvanômetro.
- 8. Lei de Faraday. e fluxo Revisão (3/7) Michael Faraday A lei de Faraday declara que: “Quando um circuito elétrico é atravessado por um fluxo magnético variável, surge uma fem (tensão) induzida atuando sobre o mesmo.” dt d e
- 9. Lei de Faraday. e fluxo Revisão (4/7) Michael Faraday Formas de se obter uma tensão induzida segundo a lei de Faraday: Provocar um movimento relativo entre o campo magnético e o circuito. Utilizar uma corrente variável para produzir um campo magnético variável. dt d e
- 10. Lei de Lenz. Heinrich Lenz Revisão (5/7) “A tensão induzida em um circuito fechado por um fluxo magnético variável produzirá uma corrente de forma a se opor á variação do fluxo que a criou” dt d e
- 11. Força Eletromagnética: quando um condutor, atravessado por corrente elétrica, é imerso em um campo magnético, surge sobre o condutor uma força mecânica; f=Bil (Força de Lorentz) B f i Revisão (6/7)
- 12. Regra da mão direita para determinar o sentido da força I I Revisão (7/7)
- 14. Estator Possui um pacote magnético cilíndrico, vazado e ranhurado internamente. Nas ranhuras são alojados os enrolamentos de campo. O pacote magnético é formado de lâminas de aço silício. Construção - Estator
- 15. Rotor: Peça maciça, cilíndrica, de material ferromagnético, em cuja superfície são incrustadas barras de alumínio ou cobre. Dois tipos: gaiola de esquilo e rotor bobinado Construção - Rotor
- 16. Rotor gaiola de esquilo Barras de alumínio ou cobre, curto-circuitadas nas extremidades através de anéis condutores Construção - Rotor
- 17. Rotor bobinado Possui ranhuras abertas que recebem os enrolamentos de armadura. Cada fase dos enrolamentos possui um dos terminais ligados a anéis montados no eixo. Construção - Rotor
- 18. O circuito externo é composto por um reostato trifásico (3) que é inserido durante a partida e eliminado gradativamente à medida que o motor acelera O fechamento dos enrolamentos (curto) é feito externamente Construção - Rotor
- 19. Carcaça : Feita de fofo, servindo de suporte para o estator e o rotor. A carcaça não faz parte do circuito magnético do estator Construção – Carcaça
- 20. Por definição um par de pólos corresponde a 360º elétricos ou 2 rad Para uma máquina de “P” pólos temos Graus Elétricos X Graus mecânicos el º P 2 mec º
- 21. Para uma máquina com 8 pólos, quantos graus mecânicos equivalem à 180º elet. Exemplo 1 mec x el P mec o º 45 180 8 2 º 2 -P=8 -. . elet º 4 mec º 1
- 22. Enrolamento monofásico excitado por uma corrente constante. a Eixo da fase a Linhas de fluxo Campo magnético girante ia t 0 ia Campo magnético constante Na direção da fase “a” (unidirecional).
- 23. Enrolamento monofásico excitado por uma corrente senoidal. Campo magnético girante a Eixo da fase a ia ia t 0 t2 t1 t0 Campo magnético pulsante Na direção da fase “a” (unidirecional).
- 24. Uma rede de alimentação trifásica balanceada possui tensões senoidais de mesma amplitude, porém defasadas no tempo de 120º elet. Campo magnético girante 1 cycle t0 t1 t2 t3 t4 va vb vc
- 25. Os embobinamentos (bobinas) do estator do motor de indução trifásico (MI3 ou MIT) são idênticos e montados a 120º geométricos um do outro. Campo magnético girante
- 26. As bobinas são alimentadas por correntes elétricas trifásicas (defasadas 120º elet. entre si e com mesma amplitude) ia (t) = Iam sen (t) ib (t) = Ibm sen (t – 120º) ic (t) = Icm sen (t + 120º ) Iam = Ibm = Icm = Im Campo magnético girante
- 27. Como H é proporcional a I, temos ha (t) = Ham . sen (t) hb (t) = Hbm . sen (t – 120º) hc (t) = Hcm . sen (t + 120º) Ham = Hbm = Hcm = Hm Estudar item 3.1 Estudo da direção do campo resultante (hr) para vários instantes, da apostila Ver animação: filme 1 - aula9_(campo girante) Campo magnético girante
- 28. Campo magnético girante Três correntes alternadas senoidais, com mesma amplitude e defasadas de 120 graus, circulando por três bobinas fixas, cujos eixos magnéticos distam 120 graus entre si, produzem um campo magnético girante de intensidade constante Eixo da fase c Eixo da fase b 1 cycle t0 t1 t2 t3 t4 ia ib ic 1 ciclo Eixo da fase a a ia t ib b c ic
- 29. Enrolamento trifásico. Campo magnético girante 1 cycle t0 t1 t2 t3 t4 ia ib ic 1 ciclo t Eixo da fase c Eixo da fase b Eixo da fase a a ia ib b c ic Ver animação: filme 2 - aula9_(rotating_mmf).ppt filme 3 - aula9_(DSCF0003)
- 30. Campo magnético girante ha(t)=Hm sen (wt) hb(t)=Hm sen (wt-120) hc(t)=Hm sen (wt+120) hr = 1,5 Hm
- 31. Velocidade síncrona: Velocidade do campo girante em uma máquina multi-pólos Campo girante é uma onda de f.m.m. que se desloca ao longo do entreferro com velocidade síncrona 120f/P formando “P” pólos girantes ao longo do entreferro Considerando a freqüência de alimentação de 60 Hz pode-se montar a seguinte tabela Velocidade síncrona ) ( . 120 rpm P f S No pólos 2 4 6 8 s (rpm) 3.600 1.800 1.200 900
- 32. Módulo constante. A velocidade de giro do rotor depende da frequência da rede elétrica. A sequencia de fase determina o sentido de rotação do campo girante. Expressão para o cálculo da velocidade de rotação do campo magnético girante também conhecida como velocidade síncrona (s): fe é a frequência das correntes trifásicas nas bobinas do estator, p é a quantidade de pólos por fase. Obs.: A constante 120 concilia a unidade de fe (Hz) com a unidade de s (rpm). Campo magnético girante (8/8) 120 e s f p
- 33. Estator constituído por três enrolamentos defasados de 120 graus energizados por uma fonte trifásica. O fluxo produzido nos enrolamentos do estator é girante com a velocidade síncrona da tensão de alimentação. Princípio de funcionamento (1/4)
- 34. O rotor é uma peça maciça, cilíndrica, de material ferromagnético, em cuja superfície são incrustadas barras de alumínio ou cobre, curto-circuitadas nas extremidades através de anéis condutores. Esta estrutura é conhecida como gaiola de esquilo. No rotor surgirão correntes induzidas devido a variação do campo girante produzido pelo estator. As correntes induzidas produzem uma segunda distribuição de fluxo no rotor. A produção de torque ocorre devido a busca de alinhamento entre os fluxos girantes do estator e do rotor. Princípio de funcionamento (2/4) Barras condutoras Anéis extremos
- 35. Este torque mecânico acelerará o rotor que começará a girar. A velocidade do rotor aumentará até atingir um ponto de equilíbrio. Princípio de funcionamento (3/4)
- 36. Se a velocidade do rotor for igual ao do campo girante. Fluxo magnético concatenado entre as bobinas seria constante. Não há indução de tensão no rotor. A velocidade do rotor diminui com o aumento da carga mecânica. Maior corrente induzida para produzir maior campo magnético. O MI possui conjugado de partida. Alta taxa de variação de fluxo, produzindo um elevado conjugado de partida O MI consome potência reativa da rede. Corrente de magnetização alta por motivo do entreferro. Princípio de funcionamento (4/4) filme 4 - Motor de Indução - Princípio de Funcionamento http://www.youtube.com/watch?v=B5aEeuYgfTE
- 37. Copiar link – ver em casa Motores Elétricos http://www.youtube.com/watch?v=lJPmwut73P4 Motores Eletricos http://www.youtube.com/watch?v=rbU_JAT6VA4 Motor de Indução - Princípio de Funcionamento http://www.youtube.com/watch?v=B5aEeuYgfTE
- 38. A diferença relativa entre as velocidades angulares das correntes do estator (s) e do rotor (r) define o escorregamento da máquina de indução. s s r s Em geral, o escorregamento é expresso em porcentagem, variando a plena carga entre 1 a 5%, dependendo do tamanho e do tipo do motor. Slip ou escorregamento
- 39. Na partida (instante), a velocidade relativa entre o rotor e o campo girante é máxima. ɷ r = 0 → S = 1 Se o rotor alcançar a velocidade síncrona ɷr = ɷs → S = 0 Em carga Com isto podemos concluir que: 0 ≤ S ≥ 1 A f.e.m. induzida na armadura tem módulo e frequência proporcionais ao escorregamento ↔ velocidade do eixo, que depende do valor da carga Slip ou escorregamento
- 40. Identificação (Dados de placa) Para instalar adequadamente um motor, é imprescindível que se saiba interpretar os seguintes dados de placa.
- 41. bloqueado; rotor de situação na estator ao referidos rotor no fluxo, de dispersão e Joule perda : , ão; magnetizaç de reatância e Ruido) Histerese, (Foucault, núcleo no perdas : , estator; no fluxo, de dispersão e Joule perda : , rotor; do e excitação de estator, do corrente : , , ; resultante entreferro de fluxo pelo gerada fcem : estator; do terminais nos fase de tensão : ´ ´ rb r m c s s rb s rb s X R X R X R I I I E V s V s I s X s R c R m X I rb E r I rb X s R2 Circuito equivalente do estator Circuito equivalente do rotor refletido Circuito equivalente Completo
- 42. s V s I s X s R c R m X I rb E r I rb X s R2 Circuito equivalente do estator Circuito equivalente do rotor refletido Circuito equivalente simplificado é considerada como uma parcela das perdas rotacionais, ensaio a vazio 2 o s o rot I R 3 P P
- 43. Devemos atentar para o fato de que as tensões e correntes induzidas no rotor são variáveis durante o processo de aceleração, uma vez, que são funções da velocidade do rotor. A f.e.m. induzida no rotor tem módulo e frequência proporcionais a velocidade do eixo, que depende do valor da carga Er = S Erb Xr = S Xrb Xrb = 2.fs.Lr Modelagem do rotor r rb r rb r rb r rb I X j s R E I X s j R E s ) (
- 44. Onde representa a resistência Rr próprio dos enrolamentos do rotor em série com uma resistência fictícia Rcarga, que traduz o comportamento da carga no eixo do Modelagem do rotor s s R R r a c 1 arg s Rr
- 45. Importância do circuito equivalente Com o circuito equivalente e seus respectivos parâmetros, podemos calcular diversas características de desempenho da máquina: Relação Torque versus velocidade Corrente de partida Fator de potência Rendimento
- 46. Análise do circuito equivalente do MIT Potencia absorvida ou Potencia de entrada ou Potencia de linha Perda no cobre do estator Potencia fornecida ao rotor Perda no cobre do rotor cos 3 s s e I V P 2 3 s s cs I R P 2 3 s r cs e fr I s R P P P 2 3 r r dr fr cr I R P P P
- 47. Análise do circuito equivalente do MIT Potencia desenvolvida pelo rotor ou Potencia interna Perdas rotacionais Potência útil ou potência de saída ou potência no eixo Rendimento 2 0 ) ( . I R P P P P s o cs o rot fr s r P s I s s R Pcr Pfr Pdr ) 1 ( ) ( . ) 1 ( 3 2 ' rot dr s P - P P 100 . (%) e s P P
- 48. Exercício Desenhe o circuito equivalente do motor de indução trifásico (MIT), em Ω / fase, referido ao estator. a) Diga o significado das grandezas referentes a tensões e correntes b) Diga a representação física de cada um dos parâmetros (impedâncias)
- 49. Exercício a) Vs = modulo da tensão de fase nos terminais do estator; Es = modulo da f.e.m induzida no estator, gerada pelo fluxo de entreferro; E’rb = modulo da f.c.e.m induzida no rotor, situação de rotor bloqueado, referido ao estator; Is = modulo da corrente de fase no estator; IØ = modulo da corrente de excitação; Ic = modulo da corrente de perdas no núcleo; Im = modulo da corrente de magnetização; I’r = modulo da corrente de fase no rotor, referido ao estator
- 50. Exercício b) Rs = resistência ohmica que representa a perda joule na bobina do estator; Xs = reatância indutiva que representa a dispersão de fluxo na bobina do estator; Rc = resistência ohmica que representa as perdas magnéticas no núcleo (Foucault, Histerese, Ruido...; Xm = reatância indutiva de magnetização; R’r = resistência ohmica que representa a perda joule na bobina rotor, referido ao estator; X’rb = reatância indutiva que representa a dispersão de fluxo na bobina do rotor referido ao estator. OBS: R’r /s = R’r + Rcarga (resistência ficticia que representa o comportamento da carga em função do escorregamento.
- 51. Exemplo 3 Um motor de indução trifásico, estator conectado em Y, 460 V, 1740 rpm, 60 Hz, 4 pólos, rotor bobinado tem os seguintes parâmetros (por fase): R1=0,25 Ω R2 ’=0,2 Ω X1=X2 ’=0,5 Ω Xm=30 Ω As perdas rotacionais são de 1700 W. Com o rotor curto-circuitado, encontre: (a) (i) corrente de partida quando ligado a tensão nominal; (ii) torque de partida; (b) (i) escorregamento a plena carga; (ii) corrente a plena carga; (iii) razão entre as correntes de partida e de carga nominal; (iv) fator de potência a plena carga; (v) torque a plena carga; (vi) eficiência interna e eficiência do motor a plena carga; (c) (i) escorregamento para torque máximo; (ii) torque máximo; (d) resistência que deve ser conectada por fase ao rotor para torque máximo na partida.
- 52. Exemplo 2 a) I1 e Tm na partida m N 17 , 185 1 241,19 2 , 0 5 , 188 3 3 A 241,19 5 , 0 49 , 0 2 , 0 24 , 0 3 , 261 Ω 49 , 0 24 , 0 9 , 63 55 , 0 5 , 30 25 , 0 5 , 0 25 , 0 30 V 3 , 261 5 , 30 25 , 0 30 6 , 265 rad/s 5 , 188 60 2 1800 2 2 ' 2 ' 2 s s ag partida m, 2 2 ' 2 th th ' 2 th th th th s s I R P T Z Z V I j j j j jX R Z j j V A 66 6 , 245 Ω 66 08 , 1 ) ( 1 Para V/fase 6 , 265 3 460 1 1 partida , 1 1 1 2 2 2 1 1 1 1 Z V I Z X X j R jX R jX jX R Z s V m m
- 53. Exemplo 2 b) s, I1, I1,partida/I1,nominal, FP; ηinterno e ηreal para carga nominal m N 11 , 163 3 75 , 5 754 , 42 9 , 245 A 7 , 19 754 , 42 94 , 0 7 , 19 cos FP Ω 7 , 19 2123 , 6 ) ( / / 0333 , 0 Para % 33 , 3 0333 , 0 1800 1740 1800 2 ' 2 ' 2 s nominal m, nominal , 1 partida , 1 1 1 nominal , 1 1 2 2 2 1 1 1 s s s I R T I I Z V I X X j s R jX s R jX jX R Z s n n n s m m
- 55. Exemplo 2 c) s para Tmáx e Tmáx m N 68 , 431 2 1 3 2 ' 2 th 2 th th 2 th s máx X X R R V T % 63 , 19 1963 , 0 2 ' 2 th 2 th ' 2 Tmáx X X R R s 2,65 11 , 163 68 , 431 nominal máx T T d) Rexterno para que Tmáx ocorra com s = 1. Ω/fase 8186 , 0 1 externo 2 ' 2 th 2 th externo ' 2 Tmáx R X X R R R s
- 56. Conjugado Motor Gerador Região de frenagem Região como motor Região como gerador Velocidade em porcentagem da velocidade síncrona Escorregamento como uma fração da velocidade síncrona s R X X s R R V T ' 2 2 ' 2 th 2 ' 2 th 2 th s mec 1 Conjugado x escorregamento
- 57. Rendimento Potência de saída ou potência no eixo: geralmente expressa em CV ou HP e eventualmente em kW. Potência de entrada menos as perdas no cobre (do estator e do rotor), no núcleo (do estator e do rotor) e perdas por atrito, resistência ao ar e ventilação. Potência de entrada: expressa em kW. Corrente nominal ou corrente de plena carga: é a corrente consumida pelo motor quando ele fornece a potência nominal a uma carga. n = Psaida / Pentrada
- 58. Rendimento A eficiência é altamente dependente do escorregamento da máquina. Para manter alta eficiência, o motor de indução deve operar próximo a velocidade síncrona.
- 59. Métodos para a limitação da corrente de partida em MI No instante de acionamento (partida) do motor de indução, este se comporta como um transformador cujo enrolamento secundário corresponde ao do rotor parado e curtocircuitado. Na partida, a resistência do rotor é muito baixa (R2’/s = R2’, s =1 ), resultando em correntes de 5 a 8 vezes o valor nominal. A circulação dessa corrente provoca uma queda de tensão elevada no alimentador, além de provocar sobre aquecimento (danos ao circuito de isolação) da máquina, caso essa corrente circule por um longo período de tempo. Devido a esses motivos, a máquina de indução deve partir com tensão reduzida ou outro método que diminua a corrente de partida.
- 60. Métodos para a limitação da corrente de partida em MI No instante de acionamento (partida) do motor de indução, este se comporta como um transformador cujo enrolamento secundário corresponde ao do rotor parado e curtocircuitado. Corrente nominal do motor de indução trifásico – corrente de linha No instante da partida do motor ( ) Para que o motor tenha condição de giro Tp > Tcarga mec cos 3 cos 3 Eixo no ominal L L L n V Pmec V N Potência I I 2 1 2 ' 2 ' ' rB Sn n S Sn r R V r I 1 0 S r cte V rb ' X r ' R V I I 1 2 2 snom ' r spartida
- 61. Métodos para redução da corrente de partida Partida com tensão reduzida (aplicado a motores com rotor em gaiola de esquilo) - Autotransformador de partida - Chave estrela-triângulo - Conversor eletrônico com tensão e freqüência variável Partida com resistor de limitação de corrente - Resistor em série com o estator (rotor em gaiola de esquilo) - Resistor em série com o rotor (rotor bobinado)
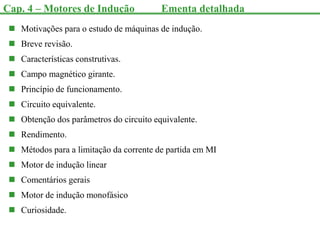
- 62. Partida direta M Distribution Line Transformer Utility Induction Motor PCC M Distribution Line Transformer Utility Induction Motor PCC (b) PCC voltage waveform 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -0.1 -0.05 0 0.05 0.1 0.15 Time (s) Motor stator current(p.u.) (a) Motor stator current waveform 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -1 -0.5 0 0.5 1 Time (s) Motor terminal voltage(p.u.) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 -0.02 0 0.02 0.04 0.06 0.08 0.1 Time (s) RMS value of motor stator current (p.u.) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0.6 0.7 0.8 0.9 1 1.1 Time (s) RMS value of motor terminal voltage (p.u.) (c) RMS value of motor stator current (d) RMS value of the PCC voltage Current and voltage waveforms of cross-line motor starting
- 63. Partida direta Além dos problemas de qualidade de energia elétrica, ocorrem períodos de aceleração e desaceleração no eixo da máquina levando a vibrações mecânicas.
- 64. Autotransformador de partida Um autotransformador trifásico abaixador pode ser empregado na partida de forma a fornecer tensão reduzida durante a aceleração da MI até próximo da velocidade nominal. Quando o motor atinge velocidade de regime permanente, o autotransformador é desconectado do circuito, através da ação de contatores R e S. Desvantagem: Diminui o torque de partida (proporcional ao quadrado da tensão terminal) e aumenta o tempo de aceleração até a velocidade nominal, uma vez que o torque acelerante (diferença entre torque eletromagnético e torque mecânico) diminui. Tipicamente, parte-se a máquina em 2 ou 3 estágios em que a tensão é gradualmente aumentada (66%, 75% 100%). Isso faz com que o torque de partida não seja muito baixo.
- 65. Chave estrela triângulo Esse método também é empregado pra alimentar a máquina com tensão reduzida durante a partida. Durante a partida os contatos são fechados no ponto 1, fazendo com que os enrolamentos do estator sejam conectados em estrela (Y) com a rede. Assim, a tensão aplicada sobre o enrolamento na partida será: 3 V -Redução de 42,3% (1-1/3) na corrente de partida
- 66. Chave estrela triângulo Em velocidade nominal, o contatos são chaveados para o ponto 2, e os enrolamentos são alimentados com a tensão terminal nominal. Esse método também provoca redução do torque de partida. Motor de Indução - Acionamento - Chave Estrela-Delta http://www.youtube.com/watch?v=lBFgMEU84Fo
- 67. Soft-starter (chave eletrônica de partida) Utilizando-se um conjunto de tiristores em anti-paralelo, pode-se partir a máquina com tensão reduzida (diminuindo a corrente de partida) Também reduz o torque de partida, portanto, usualmente a tensão de partida aplicada é em torno de 30-60% da tensão nominal. Produz distorção harmônica.
- 68. Conversor eletrônico com tensão e freqüência variável Pode ser usado um conversor eletrônico com capacidade de controlar a magnitude e a freqüência da tensão para a partida suave da máquina, mantendo a corrente limitada a um valor pré-especificado (em inglês: Variable Frequency Drive). A principal vantagem da partida via conversor eletrônico é a capacidade de fornecer torque de partida nominal durante todo o processo de partida (i.e., em qualquer velocidade) e simultaneamente limitar a corrente em seu valor nominal. Isso é feito partindo-se a máquina com freqüência e tensão reduzida mas mantendo- se a relação Volts/Hertz em seu valor nominal. Mais complexo e caro, usualmente só é economicamente justificado no caso em que o conversor é utilizado para controle de velocidade. Também introduz distorção harmônica no sistema. Induction Motor Utility Transformer Distribution Line PCC VFD g V p V
- 69. Partida via resistências externas em série com o rotor No caso de rotor bobinado, um resistência externa pode ser conectada ao enrolamento do rotor de forma a reduzir a corrente de partida (visto que a impedância equivalente do motor aumenta). Conforme a velocidade do motor aumenta, a resistência externa é gradualmente reduzida. Até que ela é eliminada quando a máquina alcança a velocidade nominal. Uma vantagem deste método é permitir obter torque máximo durante todo o processo de partida com corrente reduzida. A desvantagem deste método é que ele somente é aplicável a máquinas com rotor bobinado.
- 70. Partida via resistências externas em série com o rotor
- 71. Motor de indução linear Em certas situações (como por exemplo em transporte ferroviário e metroviário) deseja-se obter movimento translacional (em vez de rotacional). Neste caso pode-se utilizar um sistema de cremalheira para mecanicamente converter o movimento rotacional em translacional. Sendo que a vantagem desse sistema é a simplicidade e a desvantagem é o aumento das perdas mecânicas e maior necessidade de manutenção devido ao desgaste. Outra opção é empregar um motor linear que produz diretamente movimento translacional. Tais motores são denominados motores lineares.
- 72. Motor de indução linear t = t0 t = t1 ia ib ic . . + + + . . + + + A B C b c a t0 Fa = Fm Fb = -Fm/2 Fb = -Fm/2 FR = 3/2Fm t1 Fa = -Fm/2 Fb = Fm Fb = -Fm/2 FR = 3/2Fm a' . b' c' a c b Campo girante Estator Rotor primário secundário Enrol. 3 x y Campo deslizante
- 73. Motor de indução linear Se o rotor do tipo gaiola de esquilo for substituído por um cilindro de material condutor (alumínio), o rotor girará da mesma forma visto que correntes serão induzidas na superfície do rotor. Assim, utilizando-se o raciocínio simplista de desenrolar essa máquina, podemos constatar que a parte da máquina composta por material condutor irá deslizar, produzindo movimento translacional.
- 74. Motor de indução linear Visto que essa máquina não produz movimento rotacional, o termo “rotor” não é adequado. Desta forma utilizam-se os termos: Primário ou indutor: designa a parte da máquina onde os enrolamentos são energizados para produzir o campo deslizante (pode ser estático ou móvel) Secundário ou induzido: designa a parte da máquina onde as correntes são induzidas devido à ação do campo deslizante (pode ser estático ou móvel) Existem várias possibilidades de construção do secundário, mas de forma geral ele é composto de material ferromagnético (para aumentar a densidade de campo magnético e direcionar o fluxo) e material condutor, geralmente alumínio ou cobre (para permitir a indução de correntes)
- 75. Motor de indução linear CONTROLES BÁSICOS DE MOTOR DE INDUÇÃO LINEAR Velocidade controle de freqüência (conversor) Sentido do movimento inversão de duas fases Frenagem inversão de duas fases Motor Linear de Indução http://www.youtube.com/watch?v=prOrlg8-wGE
- 76. Motor de indução linear APLICAÇÕES Máquinas envolvidas em processos industriais que exigem movimentos lineares Transporte (metro/trem) Coração artificial (sistema de êmbolos) Portas deslizantes Bombeamento de líquidos (sistema de êmbolo) VANTAGENS Não são necessárias partes mecânicas para transformar o movimento rotacional em linear Permitem altas acelerações e velocidades DESVANTAGENS Efeito longitudinal de extremidade Existência de uma força normal
- 77. Motor de indução linear
- 78. Motor de indução monofásico
- 79. Motor de indução monofásico Pequenos motores usados em geladeiras, lavadoras de roupa, ventiladores, condicionadores de ar, etc., são monofásicos; Em geral a potência desses pequenos motores é fracionária, ou seja, menor do que 1 hp (1/2hp, 1/3 hp, 1/20hp, 1/30hp); Os motores monofásicos mais comuns são do tipo: Motor de indução monofásico – mais utilizado Motor síncrono monofásico – p/ aplicações com velocidade cte. Motor universal (motor série CA ou CC) – aplicações que demandem alto torque de partida ou alta velocidade (bastante usado em pequenos eletrodomésticos: liquidificador, batedeira, processadores (mixers), etc.)
- 80. Motor de indução monofásico – Rotor parado Pela Lei de Lenz, o fluxo produzido no rotor pela gaiola, se opõe ao fluxo produzido pelo enrolamento distribuído do estator; Não havendo defasagem angular entre os dois campos pulsantes não há produção de torque (não há torque de partida);
- 81. Motor de indução monofásico – Rotor girando Se o motor estiver girando, através da aplicação de um torque externo ou de circuitos auxiliares, o motor de indução monofásico produz torque, pois cria-se uma defasagem entre os dois fluxos pulsantes visto que o campo do rotor estará atrasado em relação ao campo do estator no tempo devido à tensão induzida de velocidade; s r B kB T
- 82. Motor de indução monofásico – Partida Motores de indução monofásicos não possuem torque de partida, devido ao alinhamento no espaço e no tempo entre o campo produzido pelo enrolamento do estator e o campo produzido pelas correntes induzidas no enrolamento do rotor; Não havendo defasagem angular entre os dois fluxos pulsantes não há produção de torque; s r B kB T
- 83. Um estator com dois enrolamentos idênticos defasados de 90 graus produz um campo girante com magnitude constante; Isto é, na presença de dois campos defasados no tempo e no espaço produzidos por enrolamentos no estator, tem-se um campo girante. Portanto, as principais formas empregadas para partir um motor de indução são baseadas no uso de enrolamentos auxiliares que criam dois campos defasados. Motor de indução monofásico – Partida
- 84. Motor de indução monofásico – Partida à resistência Um enrolamento auxiliar é usado para proporcionar uma defasagem inicial entre os campos principal e auxiliar de forma a criar um campo girante; O enrolamento auxiliar tem alta taxa R/X (resistência elevada: fio fino e baixa reatância: poucas espiras) de forma a aumentar a defasagem; O enrolamento principal tem baixa taxa R/X de forma a garantir melhor rendimento em regime permanente e magnetização suficiente para a máquina (baixo R e X elevada/muitas espiras);
- 85. Motor de indução monofásico – Partida à resistência A defasagem vai ser sempre menor que 90 graus (tipicamente em torno de 25o), fornecendo torque de partida moderado, para baixa corrente de partida; Uma chave centrífuga desliga o enrolamento auxiliar a 75% da velocidade nominal; Para inverter o sentido de rotação é necessário inverter a ligação do enrolamento auxiliar com a máquina parada (não reversível), visto que o torque produzido pelo enrolamento auxiliar (operação bifásica) é menor que o torque produzido pelo enrolamento principal (operação monofásica); R X principal auxiliar a
- 86. Bifásica desequilibrada até a abertura da chave centrifuga (correntes diferentes nos dois enrolamentos); Monofásica a partir do desligamento do enrolamento auxiliar; Usada em potências entre 50 e 500W em ventiladores, bombas e compressores; São de baixo custo; A falha da chave centrifuga pode queimar os enrolamentos; Motor de indução monofásico – Partida à resistência
- 87. Motor de indução monofásico – Partida à capacitor Usa-se um capacitor em série com o enrolamento auxiliar, para aumentar a defasagem inicial entre os campos do enrolamento principal e auxiliar; Resulta em maior torque de partida; Através do capacitor é possível aproximar a defasagem de 90 graus (tipicamente em torno de 82o); Produz torque de partida 2,35 maior que o motor com partida à resistência (sen82o/sen25o)
- 88. Motor de indução monofásico – Partida à capacitor Tende a reduzir a corrente de partida, pois melhora o fator de potência; Capacitor eletrolítico do tipo seco p/ operação intermitente (1min/1h); É reversível (mudança do sentido de rotação com a máquina em movimento), pois a alta defasagem (82 graus) faz com que o torque em operação bifásica seja maior do que o torque monofásico; R X principal Auxiliar + cap a
- 89. Usada em potências até 7,5 hp, para cargas de difícil partida (alto torque de partida), ou onde seja necessária a inversão do motor; São usados para acionar bombas, compressores, unidades refrigeradoras, condicionadores de ar, e máquinas de lavar de maior porte; Motor de indução monofásico – Partida à capacitor
- 90. Motor de indução monofásico de polo ranhurado Para motores pequenos, até 1/10 hp; A maior vantagem é a simplicidade: enrolamento monofásico, rotor em gaiola e peças polares especiais; Não utiliza chaves centrífugas, capacitores ou enrolamentos auxiliares; Apresenta torque de partida apenas com um enrolamento monofásico; A corrente induzida no anel de cobre do polo ranhurado, produz um fluxo atrasado, em relação ao fluxo do estator, fornecendo a defasagem necessária para a partida da máquina;
- 91. Motor de indução monofásico de polo ranhurado Máquina barata; O torque de partida é limitado; Não reversível, seria necessário desmontar o motor e inverter a posição do polo ranhurado; Pode-se projetar um motor com dupla ranhura, uma para cada sentido de rotação da máquina;
- 92. Potência instantânea do motor de indução monofásico A potência instantânea em uma MI monofásica é pulsante com o dobro da frequência da rede (o valor médio é positivo); Em parte de cada ciclo ocorre a reversão de fluxo, devido a interação dos campos direto e reverso; Como consequência, o nível de vibração e ruído de MI monofásicas é elevado, demandando algum sistema de amortecimento/absorção das vibrações mecânicas;
- 93. Motor de indução monofásico – Aplicações típicas
- 94. Comentários gerais A principal aplicação da máquina de indução é como motor. Devido à sua construção mais simples, o motor de indução, também conhecido como motor assíncrono, apresenta um custo menor e também devido à sua robustez (manutenções menos frequentes) é o motor mais utilizado na indústria, principalmente os com rotor tipo gaiola. A velocidade do rotor depende da frequência da rede elétrica, do número de polos do motor e da carga mecânica (a velocidade decresce ligeiramente com o acréscimo de carga). Para que a máquina de indução possa atuar como gerador, o seu rotor deve ser acionado a uma velocidade superior à velocidade síncrona e uma fonte de energia reativa, conectada ao estator, garante a magnetização da máquina. Esta energia pode ser suprida pela própria rede ou por um banco de capacitores conectado em paralelo ao gerador e à rede elétrica.
- 95. 2788HP * 746 = 2079848 W ~ 2 MW Curiosidade (1/2)
- 97. Exercicios 1. Em um motor de indução trifásico com rotor tipo gaiola de esquilo e em outro com rotor do tipo bobinado, a velocidade de rotação do eixo pode ser igual à velocidade de rotação do campo girante? Justifique fisicamente. 2. Analise a seguinte afirmação: "Para se acionar o motor de indução trifásico com rotor bobinado, deve-se assegurar que os terminais do rotor estejam curto-circuitados". Por quê? Justifique fisicamente. 3. Porque a troca de 2 fases da alimentação de um motor de indução trifásico produz a inversão no sentido de rotação do rotor? Justifique fisicamente. 4. Se em um processo industrial houver a necessidade de alterar a velocidade do campo girante em um motor de indução trifásico em uso, que procedimento você adotaria? Justifique.
- 98. Exercicios 5. Em um motor de indução trifásico, 4 pólos, 60 Hz, o escorregamento é de 5%. Obtenha a velocidade do rotor. 6. Em um motor de indução trifásico, 60 Hz, a velocidade síncrona é de 900 rpm. Obtenha a quantidade de pólos no estator. 7. Em um motor de indução trifásico, 60 Hz, o eixo gira a 1140 rpm. Obtenha a velocidade síncrona, a quantidade de pólos e o escorregamento. 8. Um motor de indução trifásico, D - 220 V, 60 Hz, rotor bobinado, aciona uma bomba d'água. a) Qual a importância da seqüência de fases na ligação elétrica do motor? Justifique fisicamente. b) Descreva um método para limitar a corrente na partida. Justifique fisicamente.
- 99. Exercicios 9. Numa instalação industrial, foi possível identificar em um motor de indução trifásico, as seguintes características nominais: PN = 15 CV, U = 220 V, f = 60 Hz e rendimento = 83%. Para obter o respectivo fator de potência (grandeza fundamental para dimensionar os capacitores para a correção do fator de potência), o Gerente chamou dois estagiários para resolver o problema. O primeiro disse: “Dê-me um wattímetro que resolverei o problema”. O segundo, mais modesto, disse: “Com um amperímetro consigo obter a resposta”. As figuras mostram as ligações feitas e os valores medidos pelos estagiários. Apresente os cálculos feitos pelos dois estagiários para determinar o fator de potência.