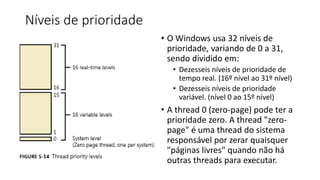
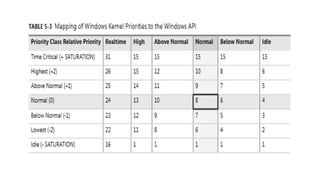
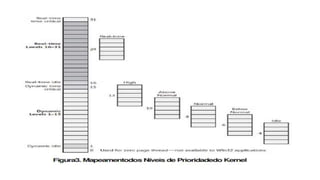
O documento discute os conceitos de escalonamento de threads no Windows, incluindo: (1) O Windows implementa um escalonador multinível do tipo feedback queue; (2) As threads possuem prioridades que variam de 0 a 31, divididas em tempos reais e variáveis; (3) O escalonador ajusta periodicamente as prioridades das threads para evitar postergação indefinida.