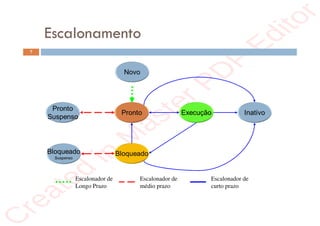
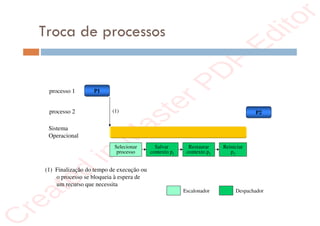
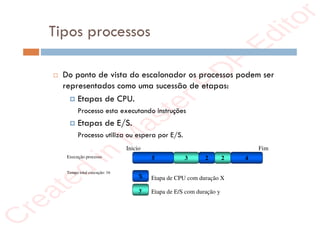
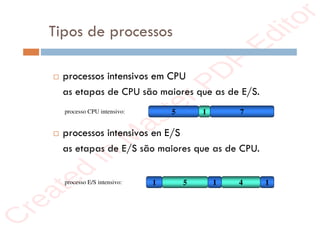
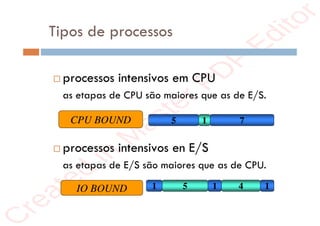
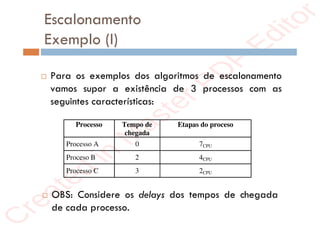
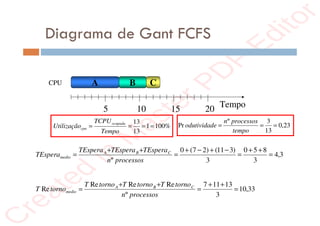
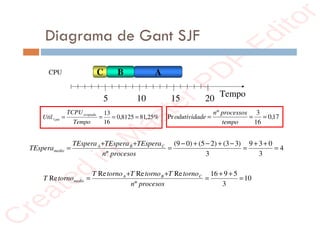
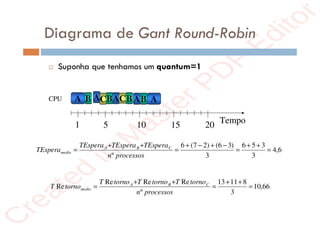
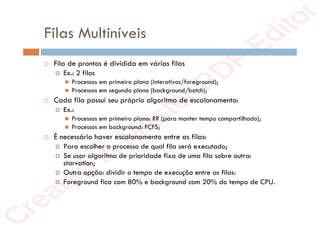
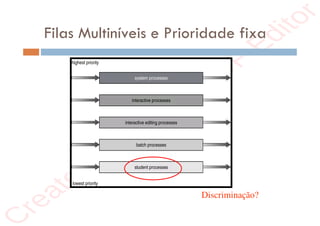
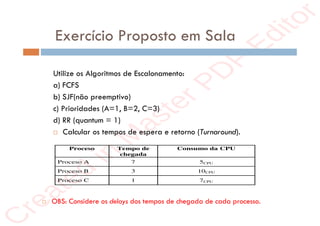
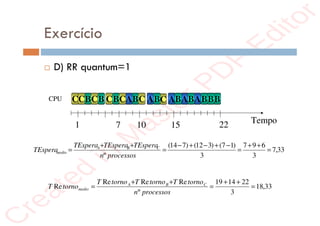
O documento discute o escalonamento de processos em sistemas operacionais, detalhando a definição, objetivos e a importância de otimizar o uso de recursos. Ele explica os tipos de escalonadores (longo, médio e curto prazo) e suas funções, além de apresentar diferentes algoritmos de escalonamento, como FCFS e SJF, incluindo suas características e impactos no desempenho do sistema. O texto também aborda a distinção entre processos CPU-bound e I/O-bound, e a dinâmica de retorno e resposta no gerenciamento de processos.