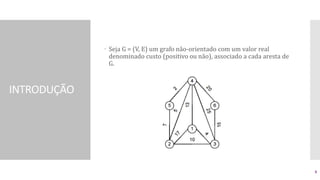
![ O algoritmo mantém durante sua execução as seguintes
informações:
- Todos os vértices que não estão na árvore, estão em uma fila de
prioridade (mínima) Q.
- Cada vértice v em Q possui uma chave[v] que indica o menor
custo de qualquer aresta ligando v a algum vértice da árvore. Se
não existir nenhuma aresta, então chave[v] = ∞
37](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-37-320.jpg)
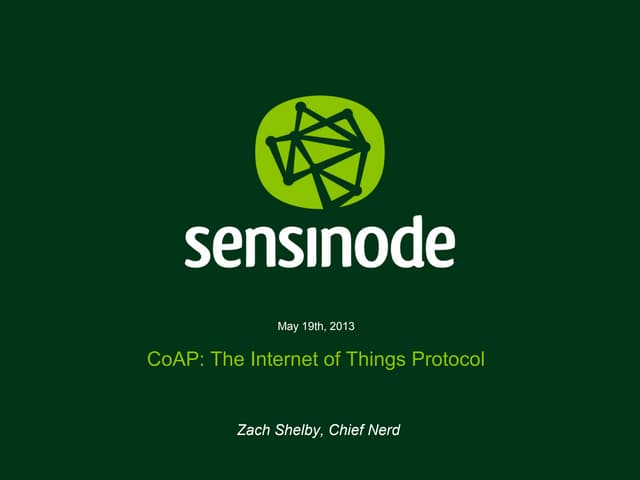
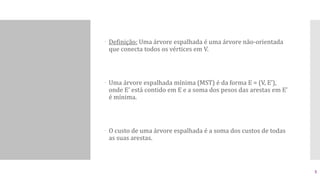
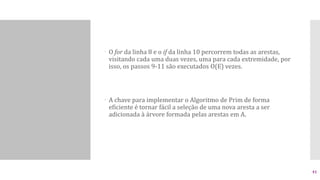
![AGM-PRIM(G, w, r )
1 para cada u ∈ V[G] faça
2 chave[u] ← ∞
3 pai[u] ← NULL
4 chave[r ] ← 0
5 Q ← V[G]
6 enquanto Q ≠ Ø faça
7 U ← EXTRAIRMÍNIMO(Q)
8 para cada v ∈ Adjacente[u] faça
9 se v ∈ Q e w(u, v) < chave [v]
10 então pai[v] ← u
11 chave[v] ← w(u, v)
12 retorne pai
38](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-38-320.jpg)
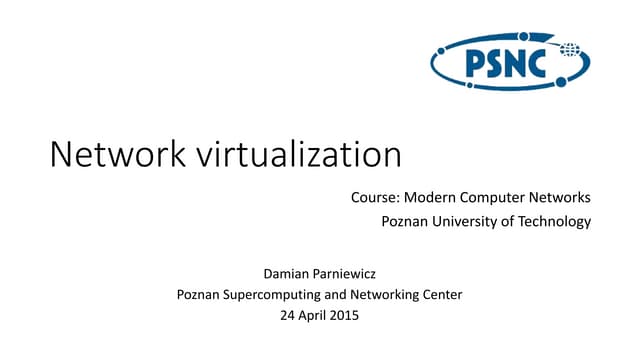
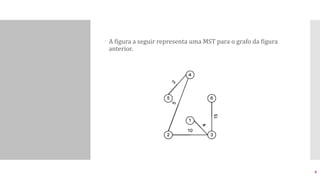
![ALGORITMO
DE PRIM
Análise de
Complexidade
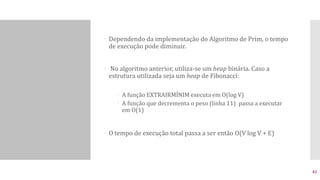
Calculando o tempo de execução do Algoritmo de Prim no pior caso,
tem-se:
1 para cada u ∈ V[G] faça O(V)
2 chave[u] ← ∞ O(1) O(V)
3 pai[u] ← NULL O(1)
4 chave[r ] ← 0 O(1)
5 Q ← V[G] O(V)
Portanto, a complexidade do laço mais externo é:
O(V) + O(1) + O(V) = O(V) + O(V)
39](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-39-320.jpg)
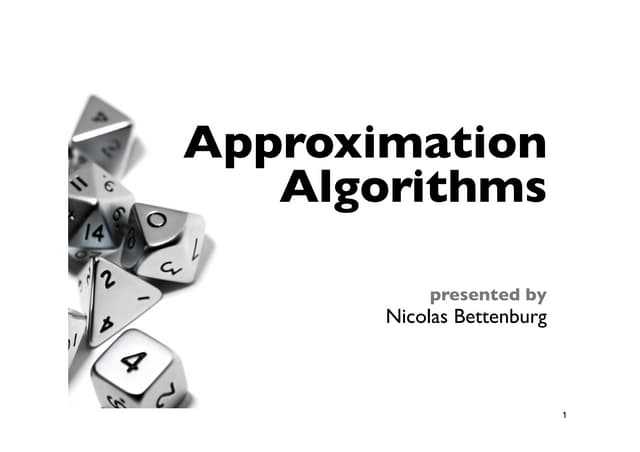
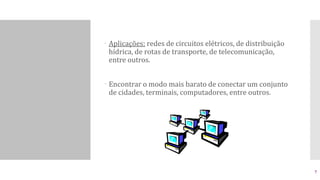
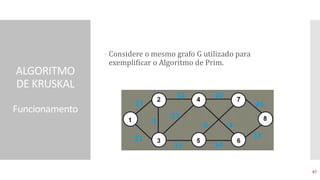
![6 enquanto Q ≠ Ø faça O(V)
7 U ← EXTRAIRMÍNIMO(Q) O(log V)
8 para cada v ∈ Adjacente[u] faça
9 se v ∈ Q e w(u, v) < chave [v] O(E)
10 então pai[v] ← u
11 chave[v] ← w(u, v) O(log V)
12 retorne pai O(1)
Portanto, a complexidade total do algoritmo é:
-> O(V) + O(V) + O(V).O(log V) + O(E).O(log V) =
-> O(V log V) + (E log V) =
-> O(E log V)
40](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-40-320.jpg)
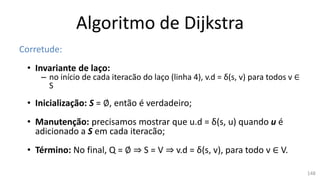
![ALGORITMO
DE PRIM
Análise de
Corretude
Etapa 1: Prova do critério de Parada Externa
Linha 1: todos os vértices v ∈ V[G] são percorridos.
Portanto, a execução é interrompida quando todos os
vértices são percorridos.
Etapa 2: Prova do critério de parada (laço interno)
Linha 6 (Critério de parada): Q ≠ Ø
Linhas 2, 3, 4 e 5 (inicialização): chave[u] ← 1; pai[u] ←
NULL; chave[r ] ← 0; Q ← V[G]
Portanto, a execução será interrompida quando Q = Ø
(lista vazia).
43](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-43-320.jpg)
![ Etapa 3: Inicialização
O algoritmo mantém o seguinte laço invariante de 3
partes nas linhas de 1 a 5:
A = {(v, pai[v]): v ∈ V – {r} – Q}
Os vértices já colocados na MST são aqueles em V – Q.
Para todos os vértices v ∈ Q, se pai[v] ≠ NULL, então
chave[v] é o peso de uma aresta leve (v, pai[v]) que
conecta v a algum vértice já inserido na MST.
44](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-44-320.jpg)
![ Etapa 4: Manutenção
Linha 7: identifica vértice u ∈ Q incidente em uma
aresta que cruza o corte (V-Q, Q). A remoção de u do
conjunto Q o acrescenta ao conjunto V-Q de vértices
na árvore, adicionando assim, (u, pai[u]) em A.
Linhas 8-11: o for atualiza os campos chave e pai de
cada vértice v adjacente a u.
45](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-45-320.jpg)
![ Etapa 5: Término
Linhas 6-11: Para todos os vértices v ∈ Q, se pai[v] ≠
NULL, então chave[v] é o peso da aresta (v, pai[v])
que conecta v a algum vértice já inserido na MST.
Portanto, corretude garantida: uma MST é gerada.
46](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-46-320.jpg)
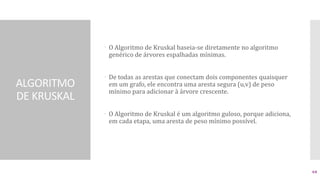
![MST-KRUSKAL(G,w)
1 A := {}
2 para cada vértice v em V[G] faça
3 MAKE-SET(v)
4 Ordene as arestas de E em ordem crescente de peso (w)
5 para cada aresta (u,v), tomadas em ordem crescente de peso (w) faça
6 se FIND-SET(u) != FIND-SET(v)
7 então A := A união {(u,v)}
8 UNION(u,v)
9 return A
65](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-65-320.jpg)
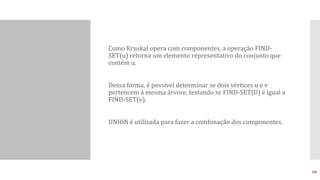
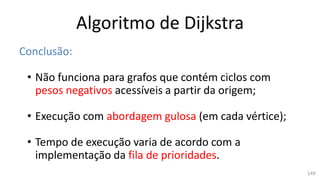
![ALGORITMO
DE KRUSKAL
Análise de
Complexidade
Calculando o tempo de execução do Algoritmo de Kruskal no pior caso,
tem-se:
1 A := {} O(1)
2 para cada vértice v em V[G] faça
3 MAKE-SET(v) O(V)
4 Ordene as arestas de E em ordem crescente de peso (w) O(E log E)
67](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-67-320.jpg)
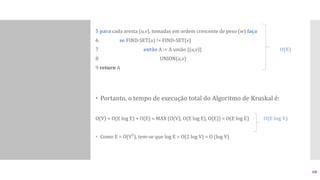
![ALGORITMO
DE KRUSKAL
Análise de
Corretude
Etapa 1: Prova do Critério de Parada Externa
Linha 2: todos os vértices v ∈ V[G] são percorridos.
Portanto, a execução é interrompida quando todos os
vértices são percorridos.
Etapa 2: Prova do Critério de parada (laço interno)
Linha 5 (Critério de parada): cada aresta (u,v), tomadas
em ordem crescente de peso (w)
Linha 1 (inicialização): A:={}
Portanto, a execução será interrompida quando todas as
arestas tiverem sido ordenadas em ordem crescente.
69](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-69-320.jpg)

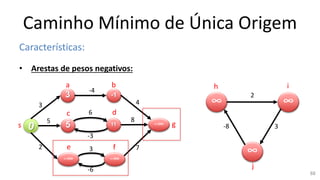
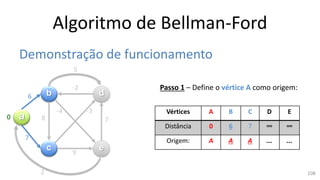
![Caminho Mínimo de Única Origem
Inicialização:
INICIALIZAÇÃO(G, s)
PARA cada vértice v ∈ V[G] FAÇA
v.d = ∞
v.π = NIL
s.d = 0
• Para cada vértice v ∈ V, mantemos um atributo v.d, que é um limite superior para o
peso de um caminho mínimo de s a v;
• Denominamos v.d uma estimativa de caminho mínimo;
– Ele indica que o algoritmo encontrou até aquele momento um caminho de s a v com peso v.d.
• Após a inicialização, temos:
– v.π = NIL, para todo v ∈ V,
– s.d = 0
– v.d = ∞, para v ∈ V – {s}
92](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-92-320.jpg)

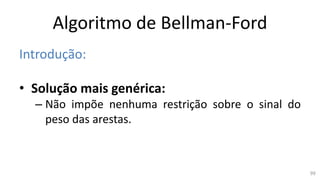
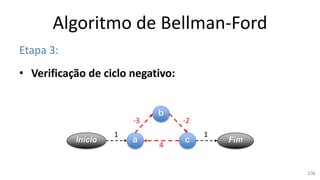
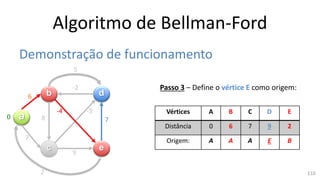
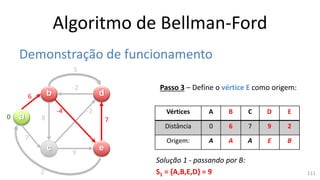
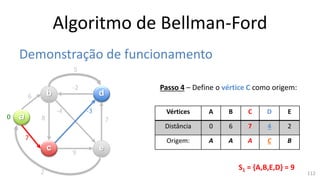
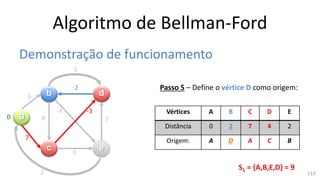
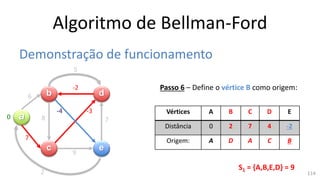
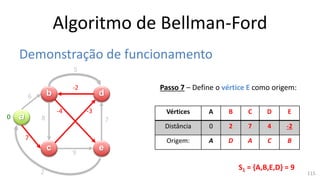
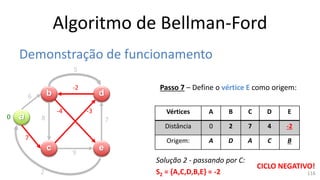
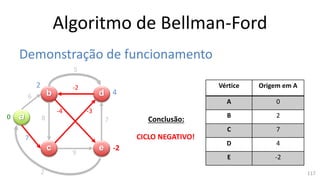
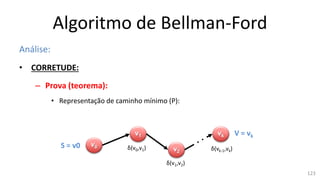
![Algoritmo de Bellman-Ford
Algoritmo:
Bellman-Ford(G, w, s)
1 INICIALIZAÇÃO(G, s)
2 para i = 1 até |V[G]|-1 faça
3 para cada aresta (u,v) ∈ E[G] faça
4 RELAXAMENTO(u, v, w)
5 para cada aresta (u,v) ∈ E[G] faça
7 se v.d > v.u + w(u,v) então
8 retorna FALSO
9 retorna VERDADEIRO
119](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-119-320.jpg)
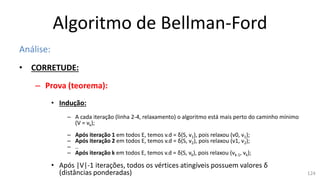
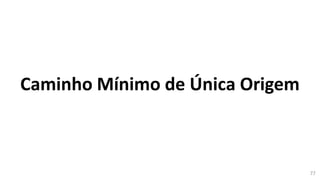
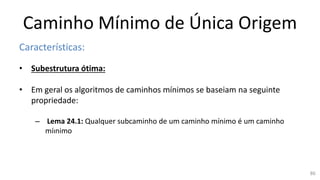
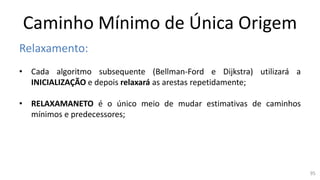
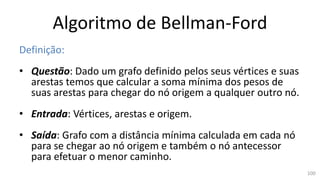
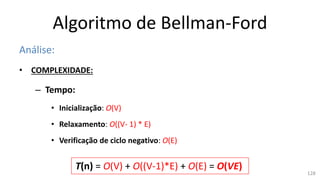
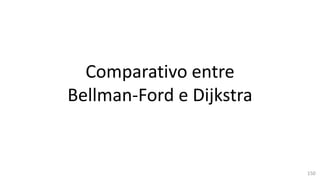
![Algoritmo de Bellman-Ford
Análise:
• COMPLEXIDADE:
Bellman-Ford(G, w, s)
1 INICIALIZAÇÃO(G, s)
2 para i = 1 até |V[G]|-1 faça
3 para cada aresta (u,v) ∈ E[G] faça
4 RELAXAMENTO(u, v, w)
5 para cada aresta (u,v) ∈ E[G] faça
7 se v.d > v.u + w(u,v) então
8 retorna FALSO
9 retorna VERDADEIRO
O(V)
O((V-1) * E)
O(E)
O(1)
Critério: T(n)
127](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-127-320.jpg)
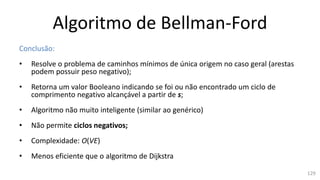

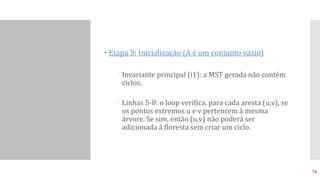
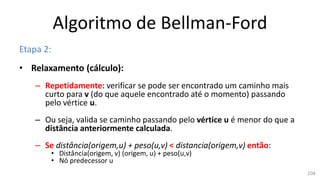
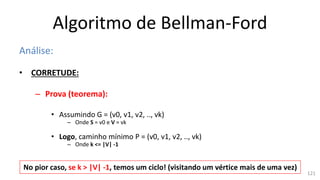
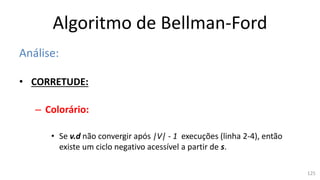
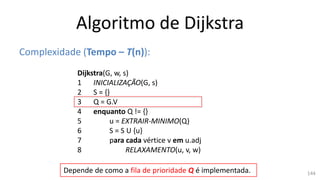
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
134](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-134-320.jpg)
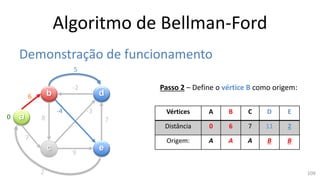
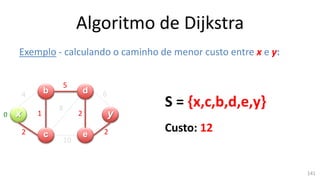
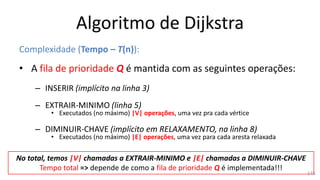
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
0
135](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-135-320.jpg)
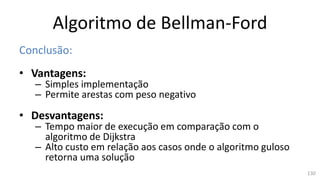
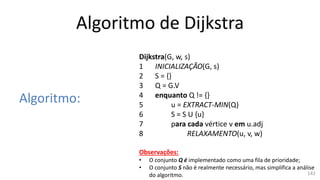
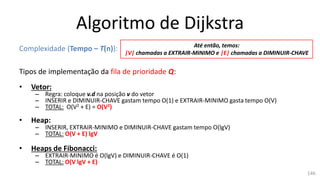
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
3 {x,c} 2 3 0 10 12 ∞
0
136](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-136-320.jpg)
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
3 {x,c} 2 3 0 10 12 ∞
4 {x,c,b} * 0 * 8 ∞ ∞
0
137](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-137-320.jpg)
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
3 {x,c} 2 3 0 10 12 ∞
4 {x,c,b} * 0 * 8 ∞ ∞
5 {x,c,b,d} * * * 0 10 14
0
138](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-138-320.jpg)
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
3 {x,c} 2 3 0 10 12 ∞
4 {x,c,b} * 0 * 8 ∞ ∞
5 {x,c,b,d} * * * 0 10 14
6 {x,c,b,d,e} * * * * 0 12
0
139](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-139-320.jpg)
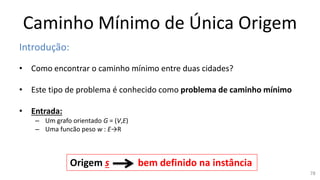
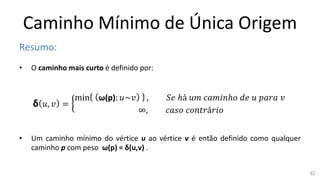
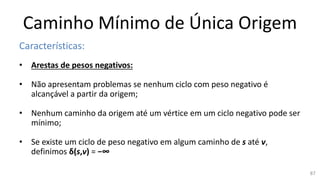
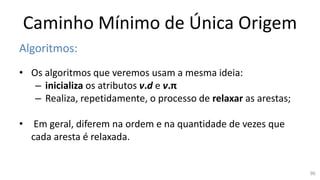
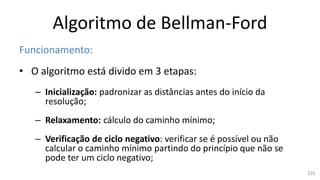
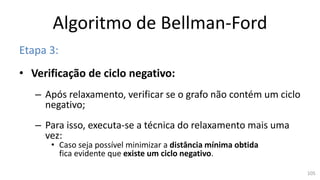
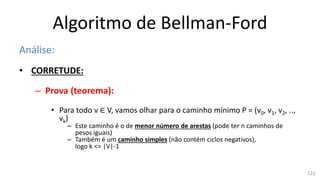
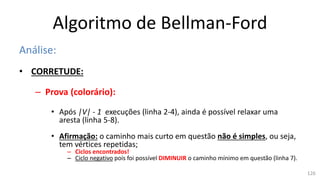
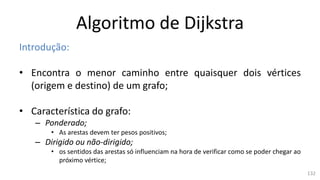
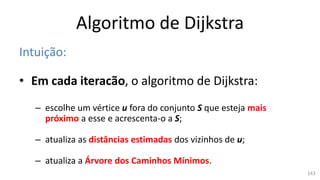
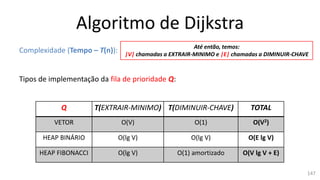
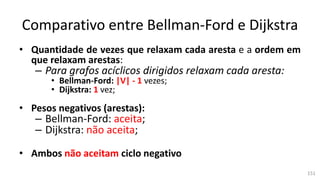
![Algoritmo de Dijkstra
Exemplo - calculando o caminho de menor custo entre x e y:
x y
b
c
d
e
4
2
1
5
10
2
8
6
2
Etapa S d[x] d[b] d[c] d[d] d[e] d[y]
1 Ø ∞ ∞ ∞ ∞ ∞ ∞
2 {x} 0 4 2 ∞ ∞ ∞
3 {x,c} 2 3 0 10 12 ∞
4 {x,c,b} * 0 * 8 ∞ ∞
5 {x,c,b,d} * * * 0 10 14
6 {x,c,b,d,e} * * * * 0 12
7 {x,c,b,d,e,y} * * * * * 0
0
140](https://image.slidesharecdn.com/seminrio-rvoresespalhadasmnimas-diegocavalcaelayla-151001155436-lva1-app6891/85/Arvores-Espalhadas-Minimas-140-320.jpg)

O documento apresenta uma introdução sobre árvores espalhadas mínimas e descreve dois algoritmos para encontrar tal árvore em um grafo: o algoritmo de Prim e o algoritmo de Kruskal. O documento discute o funcionamento, análise de complexidade e corretude de cada algoritmo e faz uma comparação entre eles.