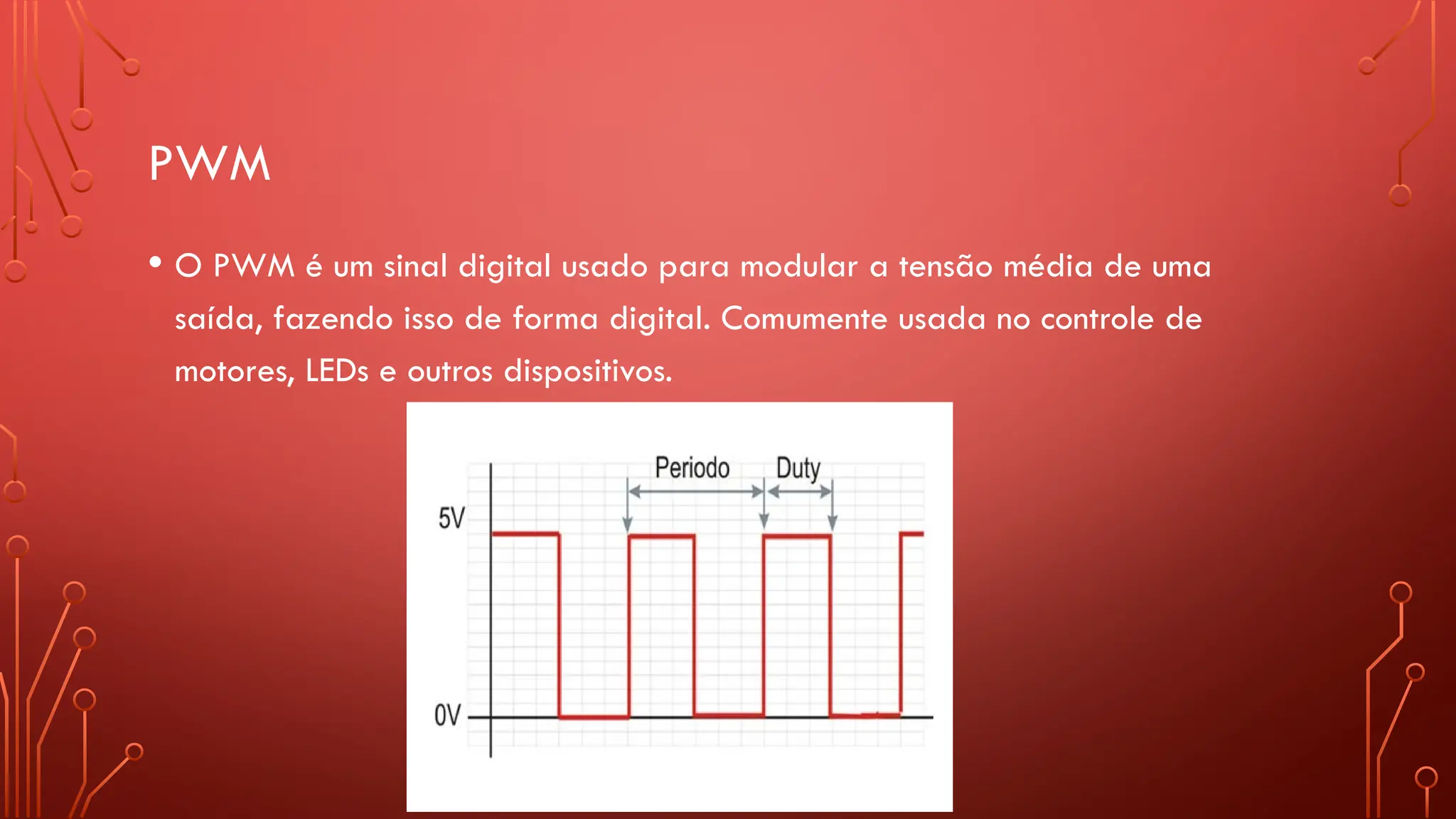
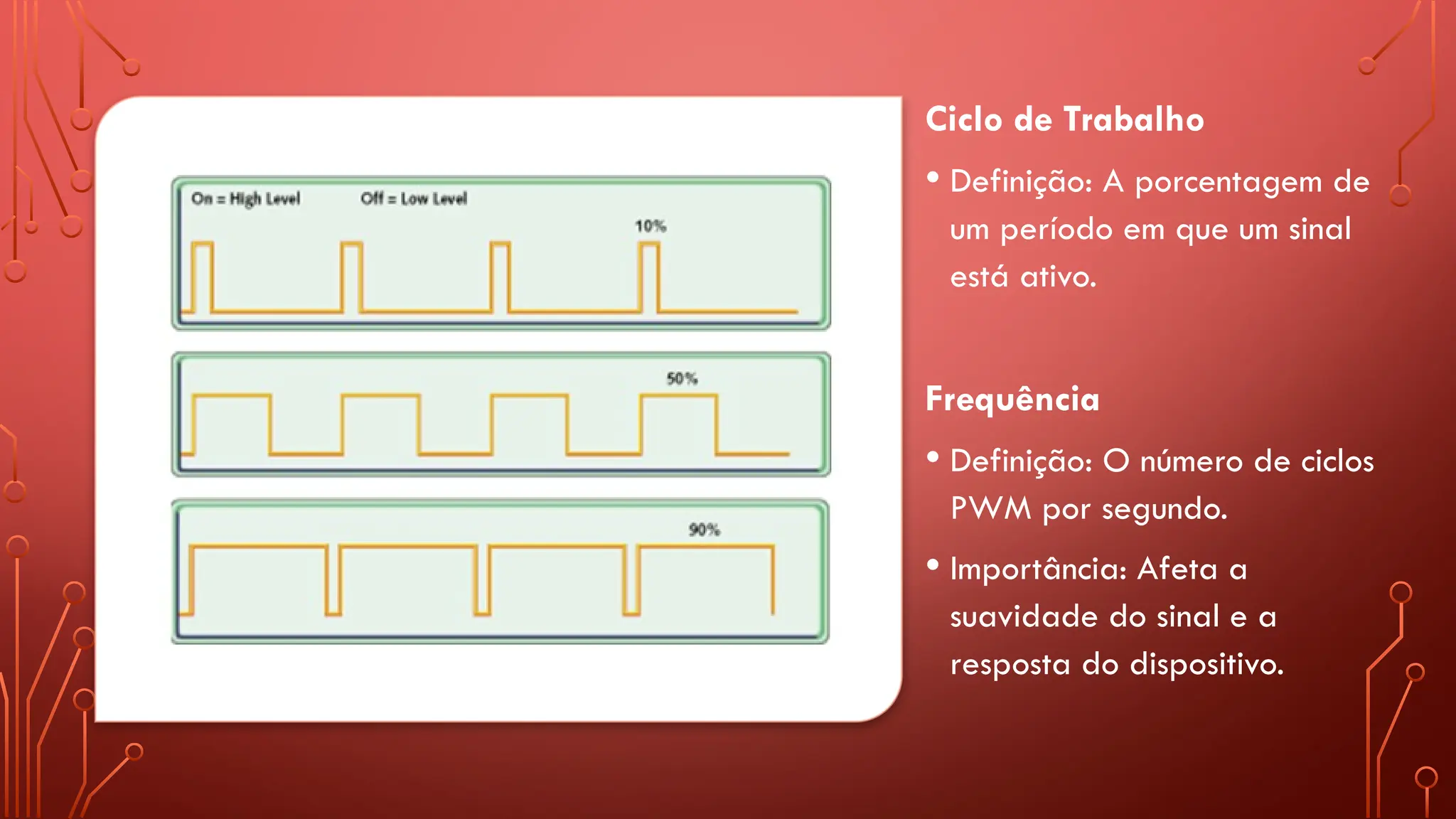
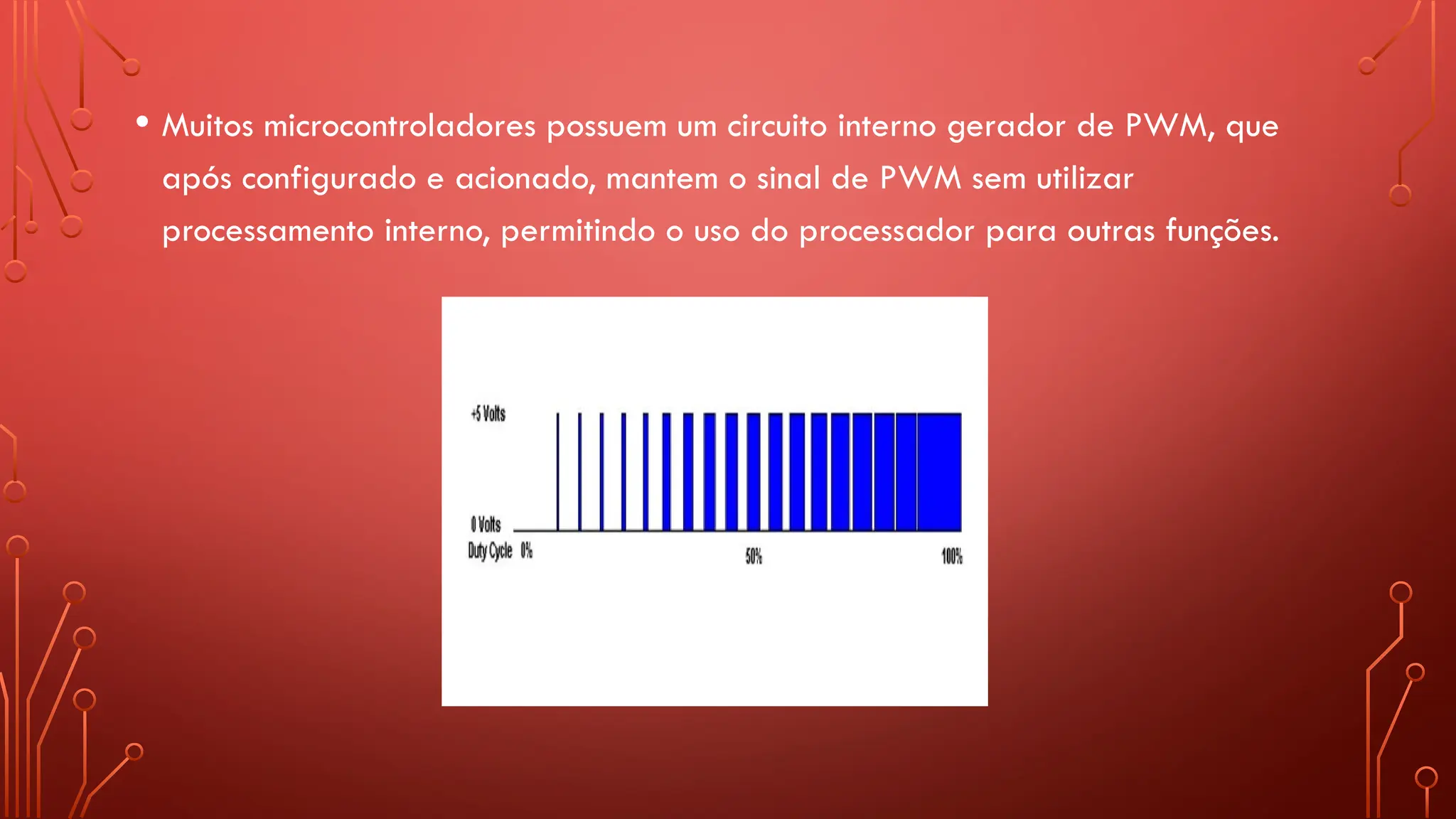
O documento aborda a modulação por largura de pulso (PWM), que é um sinal digital utilizado para controlar a tensão média em dispositivos como motores e LEDs. Ele explica conceitos de ciclo de trabalho, frequência e fornece um exemplo de configuração do PWM em microcontroladores PIC 16F877A, além de discutir o impacto de cargas resistivas e indutivas, bem como a interferência eletromagnética gerada. Por fim, a proposta da aula inclui a leitura de um sinal analógico e o uso de filtros para suavização do sinal PWM.