Transferir como PDF, PPTX
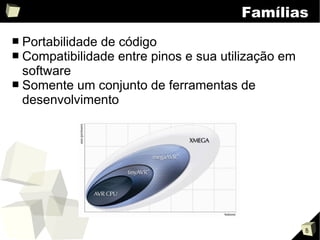
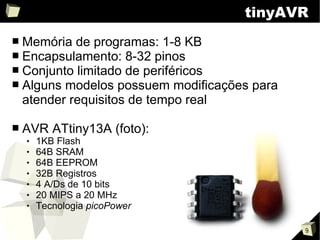

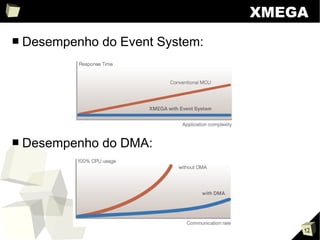




O documento explora os microcontroladores AVR, destacando sua origem, arquitetura e famílias específicas, como tinyAVR, megaAVR e AVR32. Ele discute também aplicações em tempo real, desenvolvimento de firmware e características importantes como o uso de memória flash e suporte a várias linguagens. Além disso, menciona a relevância dos AVR em setores como aeronáutica e automobilística, além de projetos de referência como o Arduino.












































