
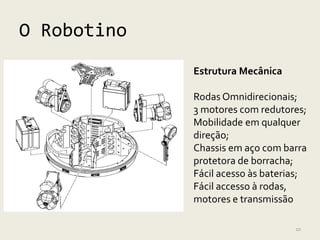
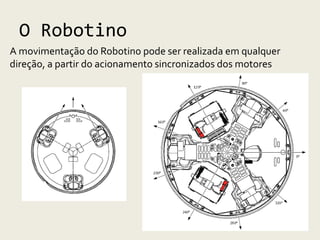
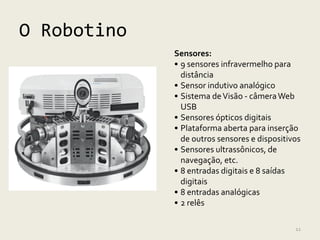
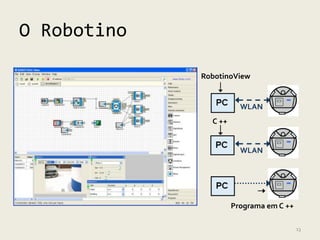
















Este documento discute robótica móvel e competições de robótica. Ele descreve objetivos educacionais da robótica móvel, o robô Robotino, treinamento para competições, critérios de avaliação, tarefas em competições, e planos futuros para competições internas.



































































