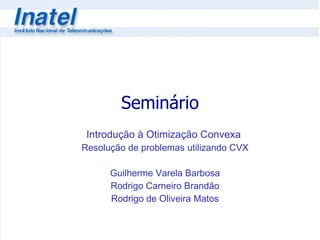

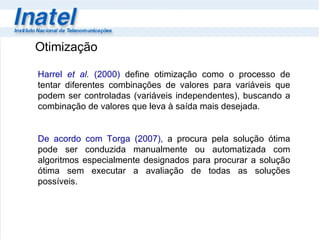
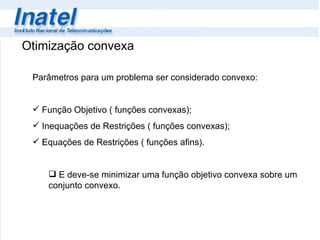
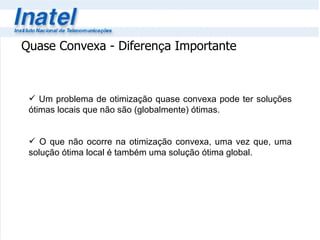
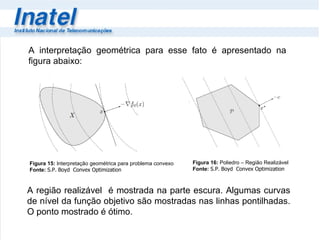
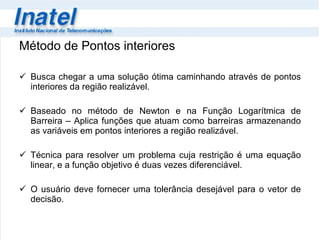
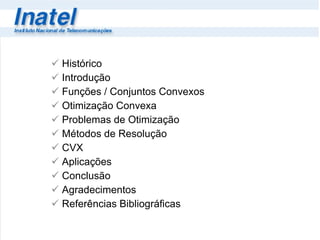
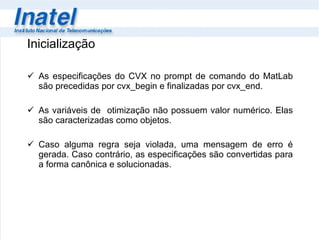
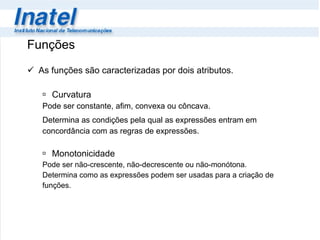
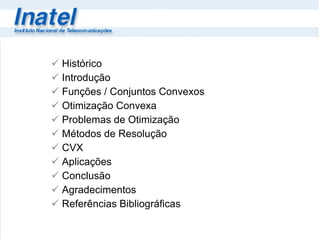
![Resultados: norm(A*x_ls-b): 2.0354 (Solução usando Mínimos Quadrados) norm(A*x-b): 2.0354 (Solução usando CVX) cvx_optval: 2.0354 cvx_status: Solved Verificando x_ls == x: x_ ls = [ -0.2628 0.8828 -0.0734 -1.0844 0.3249 -0.3330 0.0603 0.3802 ] x = [ -0.2628 0.8828 -0.0734 -1.0844 0.3249 -0.3330 0.0603 0.3802 ] Vetor resultado ( Utilizando CVX ): A*x-b = [ -0.3262 -0.0070 -0.9543 0.2447 -0.6418 -0.3426 -0.1870 0.2960 0.6024 -0.0440 0.6238 -0.7399 0.0849 0.9323 0.4799 -0.0762 ] Mínimos-quadrados](https://image.slidesharecdn.com/otimizaoconvexaecvx-110419120856-phpapp02/85/Otimizacao-convexa-e-cvx-56-320.jpg)
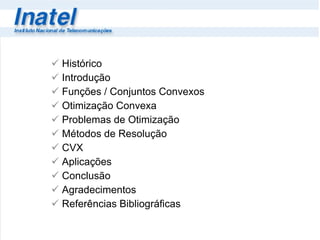
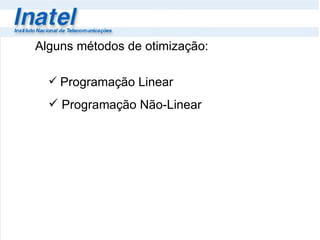
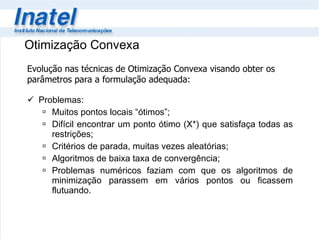
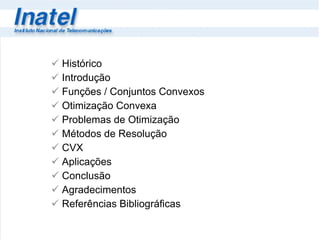
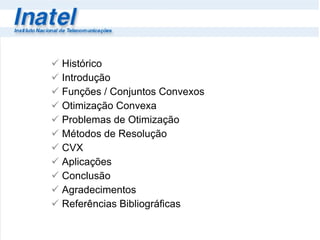
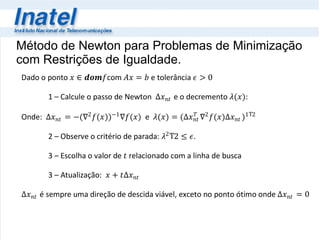
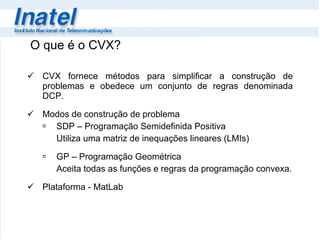
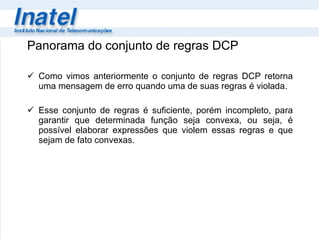
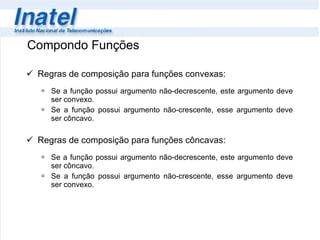
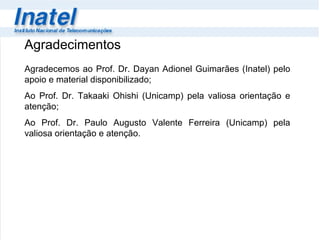
![Dados de entrada bnds = randn(n,2); l = min( bnds, [ ] ,2 ); u = max( bnds, [ ], 2 ); Solução através do Quadprog x_qp = quadprog( 2*A'*A, -2*A'*b, [], [], [], [], l, u ); Solução através do CVX cvx_begin variable x(n); minimize( norm(A*x-b) ); subject to x >= l; x <= u; cvx_end Mínimos-quadrados com restrições](https://image.slidesharecdn.com/otimizaoconvexaecvx-110419120856-phpapp02/85/Otimizacao-convexa-e-cvx-57-320.jpg)

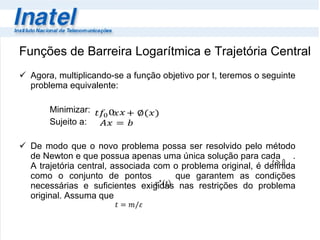
O documento discute a otimização convexa, resumindo: 1) A otimização convexa busca encontrar soluções ótimas globais, ao contrário da quase convexa que pode ter soluções locais não ótimas. 2) O método de pontos interiores é eficiente para problemas convexa, minimizando funções através de pontos dentro da região viável. 3) Funções de barreira logarítmica reformulam restrições para aplicar o método de Newton e encontrar a trajetória central do problema original.
















![Full Waveform Inversion: Introdução e Aplicações [3/5]](https://cdn.slidesharecdn.com/ss_thumbnails/a03otimizacaov03-160712143225-thumbnail.jpg?width=640&height=640&fit=bounds)






![[Alexandre] 8. Não Linear Restrita](https://cdn.slidesharecdn.com/ss_thumbnails/restrita-01-120327145714-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)










