O documento fornece instruções passo-a-passo para montar um robô corredor, começando com a fixação de motores DC e suportes na base principal, adicionando placas de circuito, cabos e rodas para permitir que o robô se mova.
PARTE 1
Para montarmos o robô corredor utilizaremos motores DC
(vídeo 0.1). O motor é uma máquina que gera torque. O
torque é uma força que realiza rotação em torno de um ponto
central como um eixo.
3.
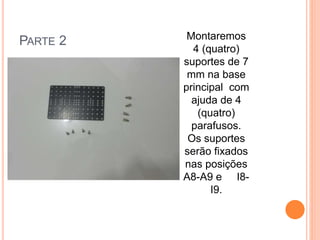
PARTE 2 Montaremos
4 (quatro)
suportes de 7
mm na base
principal com
ajuda de 4
(quatro)
parafusos.
Os suportes
serão fixados
nas posições
A8-A9 e I8-
I9.
4.
PARTE 3
Colocaremos4 (quatro) cantoneiras
de motor 2x2 nos motores DC.
(imagem 01)
5.
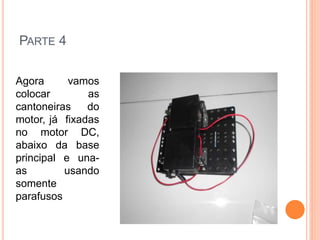
PARTE 4
Agoravamos
colocar as
cantoneiras do
motor, já fixadas
no motor DC,
abaixo da base
principal e una-as
usando
somente
parafusos
6.
PARTE 5
Encaixaremos
as rodas nos
motores DC,
depois na base
principal
fixaremos um
suporte de 35
mm, com ajuda
de um parafuso
e uma porca
cega.
7.
PARTE 6
Agora,encaixaremos o suporte de pilhas ao
suporte de 7 mm, que está fixado à base principal,
e unindo-os ao suporte e 35 mm.
8.
PARTE 7
Juntaremosagora a placa da CPU e a placa do
motor, usando parafusos e porcas, depois
fixaremos a placa de CPU nos suportes de 35
mm fixados na base principal.
9.
PARTE 8
Vamosagora
posicionar as
placas de
LED, em
uma base
media
(imagem 01)
usando
parafusos e
porcas.
10.
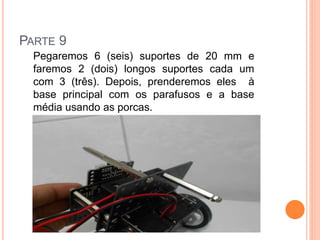
PARTE 9
Pegaremos6 (seis) suportes de 20 mm e
faremos 2 (dois) longos suportes cada um
com 3 (três). Depois, prenderemos eles à
base principal com os parafusos e a base
média usando as porcas.
11.
PARTE 10
Agora, utilizaremos os cabos de força. Preste muita
atenção, pois eles possuem um cabo preto que
deve sempre conectar-se a um suporte que possuir
uma seta =>.
12.
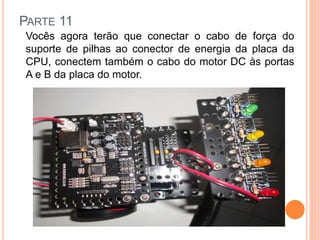
PARTE 11
Vocêsagora terão que conectar o cabo de força do
suporte de pilhas ao conector de energia da placa da
CPU, conectem também o cabo do motor DC às portas
A e B da placa do motor.
13.
PARTE 12
Muitaatenção agora, pois deveremos conectar as
portas de saída (OUT) n.º 1, n.º 2, n.º 3, e n.º4 da
placa CPU às portas n.º 1, n.º 2, n.º 3, e n.º4 da
placa do motor DC, respectivamente, usando os
cabos de 3 pinos.
14.
PARTE 13
Agora,conectem a porta de saída (OUT) n.º 5,
n.º 6, n.º 7, e n.º8 da placa de CPU aos LEDS
vermelho, laranja, amarelo e verde usando os
cabos de 3 (três) pinos.