1. O documento discute as ferramentas matemáticas necessárias para o estudo da mecânica quântica, incluindo espaços de Hilbert, funções de onda, operadores lineares e a notação bra-ket de Dirac.
2. Os espaços de Hilbert são espaços vetoriais com um produto escalar definido que satisfaz propriedades específicas. Funções quadrado-integráveis formam um espaço de Hilbert relevante para a mecânica quântica.
3. A notação bra-ket de Dirac permite representar vetores de estado em diferentes

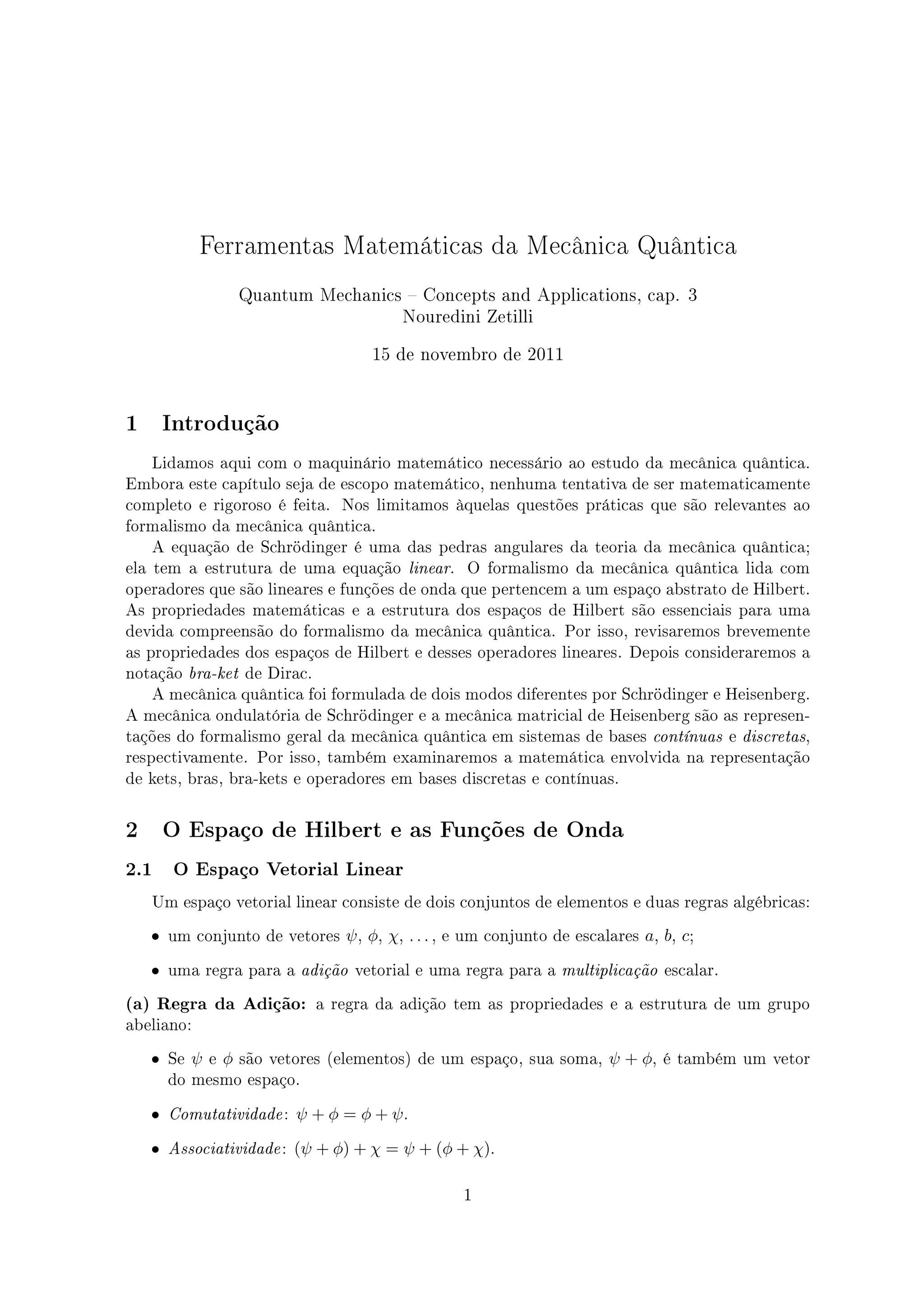










![4.4 Álgebra de Comutadores
O comutador de dois operadores ˆA e ˆB, denotado por [ ˆA, ˆB], é denido como
[ ˆA, ˆB] = ˆA ˆB − ˆB ˆA (58)
e o anticomutador é denido como
{ ˆA, ˆB} = ˆA ˆB + ˆB ˆA (59)
Dois operadores comutam se seu comutador for igual a zero, o que leva a ˆA ˆB = ˆB ˆA. Qualquer
operador comuta com ele mesmo:
[ ˆA, ˆA] = 0 . (60)
Note que se dois operadores forem Hermitianos,
(
ˆA ˆB
)†
= ˆB† ˆA†
= ˆB ˆA ,
e se seu produto for Hermitiano,
(
ˆA ˆB
)†
= ˆA ˆB ,
ou seja, e esses operadores comutam.
Como um exemplo, podemos mencionar os comutadores envolvendo a componente x do
operador posição, ˆX, e a componente x do operador momento, ˆPx = −i ∂x, bem como as
componentes y e z:
[ ˆX, ˆPx] = i ˆI , [ ˆY , ˆPy] = i ˆI e [ ˆZ, ˆPz] = i ˆI , (61)
onde ˆI é o operador unidade.
Propriedades dos operadores
Usando a relação (58), podemos estabelecer as seguintes propriedades:
• Anti-simetria:
[ ˆA, ˆB] = −[ ˆB, ˆA] . (62)
• Linearidade:
[ ˆA, ˆB + ˆC + ˆD + . . .] = [ ˆA, ˆB] + [ ˆA, ˆC] + [ ˆA, ˆD] + . . . . (63)
• Conjugado Hermitiano de um comutador:
[ ˆA, ˆB]†
= [ ˆB†
, ˆA†
] . (64)
• Distributividade:
[ ˆA, ˆB ˆC] = [ ˆA, ˆB] ˆC + ˆB[ ˆA, ˆC] , (65)
[ ˆA ˆB, ˆC] = ˆA[ ˆB, ˆC] + [ ˆA, ˆC] ˆB . (66)
12](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-12-320.jpg)
![• Identidade de Jacobi:
[ ˆA, [ ˆB, ˆC]] + [ ˆB, [ ˆC, ˆA]] + [ ˆC, [ ˆA, ˆB]] = 0 . (67)
• Por repetidas aplicações de (65), pode-se mostrar que
[ ˆA, ˆBn
] =
n−1∑
j=0
ˆBj
[ ˆA, ˆB] ˆBn−j−1
, (68)
[ ˆAn
, ˆB] =
n−1∑
j=0
ˆAn−j−1
[ ˆA, ˆB] ˆAj
. (69)
• Operadores comutam com qualquer escalar:
[ ˆA, b ] = 0 . (70)
Uma importante propriedade dos operadores Hermitianos é que seu comutador é anti-Hermitiano,
o que pode ser facilmente provado:
[ ˆA, ˆB]†
=
(
ˆA ˆB − ˆB ˆA
)†
= ˆB† ˆA†
− ˆA† ˆB†
= ˆB ˆA − ˆA ˆB = −[ ˆA, ˆB] . (71)
4.5 Relações de Incerteza entre Dois Operadores
Uma aplicação interessante da álgebra de comutadores é na derivação de uma relação geral
que dá o produto das incertezas de dois operadores ˆA e ˆB. Em particular, queremos dar uma
derivação formal das relações de incerteza de Heisenberg.
Sejam ⟨ ˆA⟩ e ⟨ ˆB⟩ os valores esperados de dois operadores Hermitianos ˆA e ˆB com relação
a um estado normalizado |ψ⟩: ⟨ ˆA⟩ = ⟨ψ| ˆA|ψ⟩ e ⟨ ˆB⟩ = ⟨ψ| ˆB|ψ⟩. Introduzindo os operadores
∆ ˆA = ˆA − ⟨ ˆA⟩ e ∆ ˆB = ˆB − ⟨ ˆB⟩ , (72)
temos
#
(
∆ ˆA
)2
= ˆA2
− 2 ˆA⟨ ˆA⟩ + ⟨ ˆA⟩2
e
(
∆ ˆB
)2
= ˆB2
− 2 ˆB⟨ ˆB⟩ + ⟨ ˆB⟩2
. (73)
Então,
⟨(∆ ˆA)2
⟩ = ⟨ψ|(∆ ˆA)2
|ψ⟩
= ⟨ψ| ˆA2
|ψ⟩ − 2⟨ψ| ˆA⟨ ˆA⟩|ψ⟩ + ⟨ψ|⟨ ˆA⟩2
|ψ⟩
= ⟨ ˆA2
⟩ − 2⟨ ˆA⟩⟨ ˆA⟩ + ⟨ ˆA⟩2
= ⟨ ˆA2
⟩ − ⟨ ˆA⟩2
, (74)
e, semelhantemente,
⟨(∆ ˆB)2
⟩ = ⟨ ˆB2
⟩ − ⟨ ˆB⟩2
. (75)
#
O quadrado da primeira das equações (72) conterá a soma − ˆA⟨ ˆA⟩ − ⟨ ˆA⟩ ˆA. Como ⟨ ˆA⟩ é um número real,
[ ˆA, ⟨ ˆA⟩] = 0, pela propriedade (70), e temos que ˆA⟨ ˆA⟩ = ⟨ ˆA⟩ ˆA. O mesmo pode ser dito com relação a (∆ ˆB)2
.
13](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-13-320.jpg)
![As incertezas ∆A e ∆B são denidas por
∆A =
√
⟨(∆ ˆA)2⟩ =
√
⟨ ˆA2⟩ − ⟨ ˆA⟩2 e ∆B =
√
⟨(∆ ˆB)2⟩ =
√
⟨ ˆB2⟩ − ⟨ ˆB⟩2 (76)
Agora, vamos escrever a ação dos operadores (72) sobre um estado |ψ⟩ qualquer:
|χ⟩ = ∆ ˆA|ψ⟩ =
(
ˆA − ⟨ ˆA⟩
)
|ψ⟩ , |ϕ⟩ = ∆ ˆB|ψ⟩ =
(
ˆB − ⟨ ˆB⟩
)
|ψ⟩ . (77)
A desigualdade de Schwarz para os estados |χ⟩ e |ϕ⟩ é
⟨χ|χ⟩⟨ϕ|ϕ⟩ ≥ |⟨χ|ϕ⟩|2
. (78)
Como ˆA e ˆB são Hermitianos, ∆ ˆA e ∆ ˆB também devem ser; de fato,
∆ ˆA†
=
(
ˆA − ⟨ ˆA⟩
)†
= ˆA†
− ⟨ ˆA⟩ = ˆA − ⟨ ˆA⟩ = ∆ ˆA ,
e, da mesma forma, ∆ ˆB† = ˆB − ⟨ ˆB⟩ = ∆ ˆB. Agora,
⟨χ| = ⟨ψ|∆ ˆA†
= ⟨ψ|∆ ˆA e ⟨ϕ| = ⟨ψ|∆ ˆB†
= ⟨ψ|∆ ˆB ,
de modo que
⟨χ|χ⟩ = ⟨ψ|(∆ ˆA)2
|ψ⟩ , ⟨ϕ|ϕ⟩ = ⟨ψ|(∆ ˆB)2
|ψ⟩ e ⟨χ|ϕ⟩ = ⟨ψ|∆ ˆA∆ ˆB|ψ⟩ . (79)
As equações (79) fornecem os valores esperados de (∆ ˆA)2, (∆ ˆB)2 e ∆ ˆA∆ ˆB. Assim, a desi-
gualdade de Schwarz (78) se torna
⟨(∆ ˆA)2
⟩⟨(∆ ˆB)2
⟩ ≥ ⟨∆ ˆA∆ ˆB⟩
2
. (80)
Para determinar o membro direito de (80), notemos primeiramente que
[∆ ˆA, ∆ ˆB] = ∆ ˆA∆ ˆB − ∆ ˆB∆ ˆA e {∆ ˆA, ∆ ˆB} = ∆ ˆA∆ ˆB + ∆ ˆB∆ ˆA
nos dão
∆ ˆA∆ ˆB =
1
2
[∆ ˆA, ∆ ˆB] +
1
2
{∆ ˆA, ∆ ˆB} . (81)
Agora,
[∆ ˆA, ∆ ˆB] = [ ˆA − ⟨ ˆA⟩, ˆB − ⟨ ˆB⟩]
=
(
ˆA − ⟨ ˆA⟩
) (
ˆB − ⟨ ˆB⟩
)
−
(
ˆB − ⟨ ˆB⟩
) (
ˆA − ⟨ ˆA⟩
)
= ˆA ˆB − ˆA⟨ ˆB⟩ − ⟨ ˆA⟩ ˆB + ⟨ ˆA⟩⟨ ˆB⟩ − ˆB ˆA + ˆB⟨ ˆA⟩ + ⟨ ˆB⟩ ˆA − ⟨ ˆB⟩⟨ ˆA⟩
= ˆA ˆB − ˆB ˆA
= [ ˆA, ˆB] ,
14](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-14-320.jpg)
![de modo que podemos escrever (81) como
∆ ˆA∆ ˆB =
1
2
[ ˆA, ˆB] +
1
2
{∆ ˆA, ∆ ˆB} . (82)
O anti-comutador {∆ ˆA, ∆ ˆB} pode ser expresso como { ˆA, ˆB} + 2⟨ ˆA⟩⟨ ˆB⟩. O anti-comutador
{ ˆA, ˆB} é Hermitiano, já que
{ ˆA, ˆB}†
=
(
ˆA ˆB + ˆB ˆA
)†
= ˆB† ˆA†
+ ˆA† ˆB†
= ˆB ˆA + ˆA ˆB .
Como [ ˆA, ˆB] é anti-Hermitiano, seu valor esperado é um número imaginário, enquanto que o
valor esperado de { ˆA, ˆB} é real. Portanto, o valor esperado ⟨∆ ˆA∆ ˆB⟩ de (82) se torna a soma
de uma parte real ⟨{∆ ˆA, ∆ ˆB}⟩/2 e de uma parte imaginária ⟨[ ˆA, ˆB]⟩/2. Portanto,
⟨∆ ˆA∆ ˆB⟩
2
=
1
4
⟨[ ˆA, ˆB]⟩
2
+
1
4
⟨{∆ ˆA, ∆ ˆB}⟩
2
. (83)
Como o último termo do membro direito é um número real positivo, podemos inferir a seguinte
relação:
⟨∆ ˆA∆ ˆB⟩
2
≥
1
4
⟨[ ˆA, ˆB]⟩
2
. (84)
Comparando as expressões (80) e (84), concluímos que
⟨(∆ ˆA)2
⟩⟨(∆ ˆB)2
⟩ ≥
1
4
⟨[ ˆA, ˆB]⟩
2
. (85)
Tirando a raiz quadrada de (85) e usando as denições de incerteza (76), chegamos a
∆A∆B ≥
1
2
⟨[ ˆA, ˆB]⟩ (86)
Essa relação de incerteza desempenha um papel importante no formalismo da mecânica quân-
tica. Sua aplicação aos operadores posição e momento leva às relações de incerteza de Hei-
senberg, que representam um das pedras angulares da mecânica quântica.
Para derivar as relações de incerteza de Heisenberg, aplicamos (86) aos operadores denidos
em (61). Utilizando a primeira relação em (61), temos
∆x∆px ≥
1
2
⟨[ ˆX, ˆPx]⟩ =
1
2
⟨ψ|[ ˆX, ˆPx]|ψ⟩ =
1
2
⟨ψ|i ˆI|ψ⟩ =
1
2
i ⟨ψ|ˆI|ψ⟩ =
1
2
|i | ,
ou
∆x∆px ≥
2
.
Expressões para as outras componentes são imediatas, e podemos escrever
∆x∆px ≥
2
, ∆y∆py ≥
2
, ∆z∆pz ≥
2
(87)
Essas são as relações de incerteza de Heisenberg.
15](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-15-320.jpg)
![4.6 Funções de Operadores
Seja F( ˆA) uma função de um operador ˆA. Se ˆA é um operador linear, podemos expandir
F( ˆA) em uma série de Taylor de potências de ˆA:
F( ˆA) =
∞∑
n=0
an
ˆAn
, (88)
onde an é um coeciente da expansão. Como uma ilustração de uma função de um operador,
consideremos ea ˆA, onde a é um escalar complexo ou real. Podemos expandi-la assim:
ea ˆA
=
∞∑
n=0
an
n!
ˆA = ˆI + a ˆA +
a2
2
ˆA2
+
a3
3
ˆA3
+ . . . . (89)
Comutadores envolvendo funções de operadores
Se ˆA comuta com outro operador ˆB, então ˆB comuta com qualquer função de operador que
dependa de ˆA:
[ ˆA, ˆB] = 0 =⇒ [ ˆB, F( ˆA)] = 0 . (90)
Em particular, F( ˆA) comuta com ˆA e com qualquer outra função G( ˆA):
[ ˆA, F( ˆA)] , [ ˆAn
, F( ˆA)] , [F( ˆA), G( ˆA)] . (91)
Adjuntos Hermitianos de funções de operadores
O adjunto de F( ˆA) é dado por
[F( ˆA)]†
= F∗
( ˆA†
) . (92)
Note que se ˆA for Hermitiano, F( ˆA) não será necessariamente Hermitiana, exceto se F for
uma função real (e, óbvio, se ˆA for Hermitiano). Um exemplo é:
(e
ˆA
)†
= e
ˆA†
= e
ˆA
, (ei ˆA
)†
= e−i ˆA†
= e−i ˆA
, (eiα ˆA
)†
= e−iα∗ ˆA†
= e−iα∗ ˆA
,
onde α é um número complexo. Assim, se ˆA for Hermitiano, uma função de operador que
admita expansão em série de Taylor, como em (89), será Hermitiana apenas se os coecientes
an da expansão forem números reais. Mas em geral F( ˆA) não é Hermitiana mesmo se ˆA for
Hermitiano, já que
F∗
( ˆA†
) =
∞∑
n=0
a∗
n
(
ˆA†
)n
. (93)
4.7 Operadores Inverso e Unitário
Inverso de um operador: Admitindo que exista
$, o inverso ˆA−1 de um operador linear ˆA
é denido pela relação
ˆA−1 ˆA = ˆA ˆA−1
= ˆI , (94)
onde ˆI é o operador unidade (aquele que deixa inalterado qualquer estado |ψ⟩).
$
Nem todo operador possui inverso, assim como no caso das matrizes. A inversa de uma matriz existe
apenas quando seu determinante for zero.
16](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-16-320.jpg)



![4.9.1 Transformações Unitárias
Kets e bras se transformam do seguinte modo:
|ψ′
⟩ = ˆU|ψ⟩ , ⟨ψ′
| = ⟨ψ| ˆU†
. (112)
Vamos descobrir agora como operadores se transformam sob transformações unitárias. Como
a transformada de ˆA|ψ⟩ = |ϕ⟩ é ˆA′|ψ′⟩ = |ϕ′⟩, vamos usar (102) para escrever
ˆA′ ˆU|ψ⟩ = ˆU|ϕ⟩ = ˆU ˆA|ψ⟩ , (113)
o que leva a ˆA′ ˆU = ˆU ˆA. Lembrando que ˆU ˆU† = ˆU† ˆU = ˆI, vamos multiplicar ambos os lados
de ˆA′ ˆU = ˆU ˆA por ˆU†. Temos:
ˆU† ˆA′ ˆU = ˆU† ˆU ˆA = ˆI ˆA = ˆA ,
e
ˆU ˆA ˆU†
= ˆA′ ˆU ˆU†
= ˆA′ ˆI = ˆA′
.
Resumindo, podemos escrever
|ψ′
⟩ = ˆU|ψ⟩ , ⟨ψ′
| = ⟨ψ| ˆU†
, ˆA′
= ˆU ˆA ˆU†
(114)
e
|ψ⟩ = ˆU†
|ψ′
⟩ , ⟨ψ| = ⟨ψ′
| ˆU , ˆA = ˆU† ˆA′ ˆU (115)
Propriedades das transformações unitárias
• Se um operador ˆA é Hermitiano, seu transformado ˆA′ também é Hermitiano, pois
ˆA′†
=
(
ˆU ˆA ˆU†
)†
=
(
ˆU†
)†
ˆA† ˆU†
= ˆU ˆA† ˆU†
= ˆU ˆA ˆU†
= ˆA′
. (116)
• Os autovalores de ˆA e de seu transformado ˆA′ são os mesmos, ou seja,
ˆA|ψn⟩ = an|ψn⟩ =⇒ ˆA′
|ψ′
n⟩ = an|ψ′
n⟩ . (117)
A demonstração é simples:
ˆA′
|ψ′
n⟩ =
(
ˆU ˆA ˆU†
) (
ˆU|ψn⟩
)
= ˆU ˆA
(
ˆU† ˆU
)
|ψn⟩ = ˆU ˆA|ψn⟩ = an
(
ˆU|ψn⟩
)
= |ψ′
n⟩ .
• Comutadores que são iguais a números (complexos) permanecem inalterados sob trans-
formações unitárias, ou seja, dado a ∈ C
[ ˆA, ˆB] = a =⇒ [ ˆA′
, ˆB′
] = a = [ ˆA, ˆB] . (118)
Usando (115), temos:
[ ˆA′
, ˆB′
] = [ ˆU ˆA ˆU†
, ˆU ˆB ˆU†
] =
(
ˆU ˆA ˆU†
) (
ˆU ˆB ˆU†
)
−
(
ˆU ˆB ˆU†
) (
ˆU ˆA ˆU†
)
= ˆU
(
ˆA ˆB
)
ˆU†
− ˆU
(
ˆB ˆA
)
ˆU†
= ˆU[ ˆA, ˆB] ˆU†
= ˆUa ˆU†
= a ˆU ˆU†
= a = [ ˆA, ˆB] .
20](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-20-320.jpg)

![onde desprezamos o termos quadrático em ε.
A transformação de um vetor de estado |ψ⟩ é dada por
|ψ′
⟩ = (ˆI + iε ˆG)|ψ⟩ = |ψ⟩ + δ|ψ⟩ , (129)
onde
δ|ψ⟩ = iε ˆG|ψ⟩ . (130)
A transformação de um operador ˆA é dada por
ˆA′
= (ˆI + iε ˆG) ˆA(ˆI − iε ˆG) = (ˆI + iε ˆG)( ˆA − iε ˆA ˆG) ≃ ˆA − iε ˆA ˆG + iε ˆA ˆG ,
ou
ˆA′ = (ˆI + iε ˆG) ˆA(ˆI − iε ˆG) ≃ ˆA + iε[ ˆG, ˆA] (131)
Se ˆG comuta com ˆA, a transformação unitária deixará ˆA inalterado:
[ ˆG, ˆA] = 0 =⇒ ˆA′
= ˆA′
= (ˆI + iε ˆG) ˆA(ˆI − iε ˆG) = ˆA . (132)
4.9.3 Transformações Unitárias Finitas
Pode-se construir uma transformação unitária nita a partir de (127) executando uma
sucessão de transformações innitesimais de passos iguais a ε; a aplicação de uma série de
transformações unitárias sucessivas é equivalente à aplicação de uma única transformação
unitária. Sendo ε = α/N, onde N é um inteiro e α é um parâmetro nito, podemos aplicar a
mesma transformação unitária N vezes. No limite em que n → +∞, obtemos
ˆUα( ˆG) = lim
n→∞
N∏
k=1
(
1 + i
α
N
ˆG
)
= lim
n→+∞
(
1 + i
α
N
ˆG
)N
= eiα ˆG
, (133)
onde ˆG é agora o gerador da transformação nita e α é seu parâmetro. A transformação ˆU
será unitária apenas quando o parâmetro α for real e ˆG for Hermitiano, pois
(eiα ˆG
)†
= e−iα ˆG†
= e−iα ˆG
= (eiα ˆG
)−1
. (134)
É possível mostrar que a transformação ˆA′ de um operador ˆA pode ser escrita como
eiα ˆG
e−iα ˆG
= ˆA + iα[ ˆG, ˆA] +
(iα)2
2!
[ ˆG, [ ˆG, ˆA]] +
(iα)3
3!
[ ˆG, [ ˆG, [ ˆG, ˆA]]] + . . . (135)
Se ˆG comuta com ˆA, a transformação unitária deixará ˆA inalterado:
[ ˆG, ˆA] = 0 =⇒ ˆA′
= eiα ˆG
e−iα ˆG
= ˆA . (136)
Algumas das aplicações das transformações unitárias innitesimais são o estudo de translações
espaciais e temporais, rotações espaciais e leis de conservação.
5 Representação em Bases Discretas
Por analogia dos espaços vetoriais Euclideanos em termos de vetores de base, precisamos
expressar um ket |ψ⟩ do espaço de Hilbert em termos de um conjunto completo de kets de base
mutuamente ortogonais. Vetores de estados são então representados por suas componentes
nessa base.
22](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-22-320.jpg)




![Veremos mais tarde que o traço de um operador não depende da base. O traço de uma matriz
é igual à soma dos elementos de sua diagonal principal, ou seja,
Tr
A11 A12 A13 . . .
A21 A22 A23 . . .
A31 A32 A33 . . .
.
.
.
.
.
.
.
.
.
. . .
= A11 + A22 + A33 + . . . . (158)
Dado um operador ˆA, valem as seguintes propriedades:
Tr( ˆA†
) = (Tr( ˆA))∗
(159)
e
Tr(α ˆA + β ˆB + γ ˆC + . . .) = α Tr( ˆA) + β Tr( ˆB) + γ Tr( ˆC) + . . . . (160)
Uma propriedade fácil de demonstrar é que Tr( ˆA ˆB) = Tr( ˆB ˆA). De fato,
Tr( ˆA ˆB) =
∑
n
⟨ϕn| ˆA ˆB|ϕn⟩
=
∑
n
⟨ϕn| ˆA
(
∑
m
|ϕm⟩⟨ϕm|
)
ˆB|ϕn⟩
=
∑
nm
⟨ϕn| ˆA|ϕm⟩⟨ϕm| ˆB|ϕn⟩
=
∑
nm
AnmBmn
=
∑
nm
BmnAnm
=
∑
nm
⟨ϕm| ˆB|ϕn⟩⟨ϕn| ˆA|ϕm⟩
=
∑
m
⟨ϕm| ˆB
(
∑
n
|ϕn⟩⟨ϕn|
)
ˆA|ϕm⟩ =
∑
m
⟨ϕm| ˆB ˆA|ϕm⟩ = Tr( ˆB ˆA) . (161)
Em vista do resultado (161), pode-se mostrar que o traço de um comutador é nulo:
Tr([ ˆA, ˆB]) = Tr( ˆA ˆB) − Tr( ˆB ˆA) = 0 . (162)
Além disso, o traço de um produto de operadores é invariante sob permutações cíclicas desses
operadores:
Tr( ˆA ˆB ˆC ˆD ˆE) = Tr( ˆE ˆA ˆB ˆC ˆD) = Tr( ˆD ˆE ˆA ˆB ˆC) = Tr( ˆC ˆD ˆE ˆA ˆB) = . . . . (163)
5.1.4 Representação Matricial de Várias Outras Quantidades
(a) Representação matricial de |ϕ⟩ = ˆA|ψ⟩
A relação |ϕ⟩ = ˆA|ψ⟩ pode ser posta na forma algébrica ˆI|ϕ⟩ = ˆI ˆAˆI|ψ⟩, ou
(
∑
n
|ϕn⟩⟨ϕn|
)
|ϕ⟩ =
(
∑
n
|ϕn⟩⟨ϕn|
)
ˆA
(
∑
m
|ϕm⟩⟨ϕm|
)
|ψ⟩ ,
27](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-27-320.jpg)





![Então,
∑
n
Amn⟨ϕn|ψ⟩ =
∑
n
aδmn⟨ϕn|ψ⟩ ,
que pode ser escrito como
∑
n
[Amn − aδmn] ⟨ϕn|ψ⟩ = 0 , (195)
com Amn = ⟨ϕm| ˆA|ϕn⟩.
Essa equação representa um sistema innito de equações homogêneas para os coecientes
⟨ϕn|ψ⟩, já que a base {|ϕn⟩} contém um número innito de kets. Esse sistema de equações
pode ter soluções não triviais apenas se seu determinante for nulo:
det (Amn − aδmn) = 0 . (196)
O problema que surge aqui é que esse determinante corresponde a uma matriz com innitas
linhas e innitas colunas. Para resolver (196) precisamos truncar a base {|ϕn⟩} e admitir que
ela contém apenas N termos, onde N deve ser grande o suciente para garantir convergência.
Nesse caso podemos reduzir (196) ao seguinte determinante de grau N:
A11 − a A12 A13 . . . A1N
A21 A22 − a A23 . . . A2N
A31 A32 A33 − a . . . A3N
.
.
.
.
.
.
.
.
.
. . .
.
.
.
AN1 AN2 AN3 . . . ANN − a
= 0 . (197)
Essa equação é conhecida como equação secular ou característica. Suas soluções fornecem os
N autovalores a1, a2, . . . , aN , já que é uma equação de N-ésimo grau em a. O conjunto desses
N autovalores é chamado de espectro de ˆA. Conhecendo-se o conjunto de autovalores a1, a2,
. . . , aN , pode-se facilmente determinar o correspondente conjunto de autovetores |ϕ1⟩, |ϕ2⟩,
. . . , |ϕN ⟩. Para cada autovalor am de ˆA, pode-se obter a partir de (197) as N componentes
⟨ϕ1|ψ⟩, ⟨ϕ2|ψ⟩, . . . , ⟨ϕN |ψ⟩ do autovetor |ϕm⟩ correspondente.
Se vários autovetores diferentes têm o mesmo autovalor, esse autovalor é dito ser dege-
nerado. A ordem de degenerescência é determinada pelo número de autovetores linearmente
independentes que têm o mesmo autovalor. Por exemplo, se um autovalor tem cinco autove-
tores diferentes, diz-se que ele tem degenerescência quíntupla.
Quando o conjunto de autovetores {|ϕn⟩} de ˆA for completo e ortonormal, esse conjunto
pode ser usado como base. Nessa base, a matriz que representa o operador ˆA é diagonal:
A =
a1 0 0 . . .
0 a2 0 . . .
0 0 a3 . . .
.
.
.
.
.
.
.
.
.
. . .
, (198)
onde os elementos da diagonal principal são os autovalores an de ˆA, já que
⟨ϕm| ˆA|ϕn⟩ = an⟨ϕm|ϕn⟩ = anδmn . (199)
33](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-33-320.jpg)



![Isto é conhecido como a função de onda para o vetor de estado |ψ⟩. De acordo com a in-
terpretação probabilística de Born, a quantidade |⟨r|ψ⟩|2
d3r representa a probabilidade de
encontrar o sistema no elemento de volume d3r.
O produto escalar entre dois vetores de estado, |ψ⟩ e |ϕ⟩, pode ser expressa desta forma:
⟨ϕ|ψ⟩ = ⟨ϕ|ˆI|ψ⟩ = ⟨ϕ|
(∫
d3
r |r⟩⟨r|
)
|ψ⟩
=
∫
d3
r ⟨ϕ|r⟩⟨r|ψ⟩
=
∫
d3
r ⟨r|ϕ⟩∗
⟨r|ψ⟩ =
∫
d3
r ϕ∗
(r) ψ(r) . (225)
Como ˆR|r⟩ = r|r⟩, temos que ˆR2 = ˆRˆR aplicado a |r⟩ é
ˆR2
|r⟩ = ˆR
(
ˆR|r⟩
)
= ˆR (r|r⟩) = rˆR|r⟩ = r2
|r⟩ ,
que pode ser generalizado para
ˆRn
|r⟩ = rn
|r⟩ .
Com isso, temos
⟨r′
|ˆRn
|r⟩ = ⟨r′
|rn
|r⟩ = rn
⟨r′
|r⟩ = rn
δ(r′
− r) . (226)
Note que o operador ˆR é Hermitiano, pois
⟨ϕ|ˆR|ψ⟩ = ⟨ϕ|ˆRˆI|ψ⟩ = ⟨ϕ|ˆR
(∫
d3
r |r⟩⟨r|
)
|ψ⟩
=
∫
d3
r ⟨ϕ|ˆR|r⟩⟨r|ψ⟩
=
∫
d3
r r⟨ϕ|r⟩⟨r|ψ⟩
=
[∫
d3
r r⟨ψ|r⟩⟨r|ϕ⟩
]∗
=
[∫
d3
r ⟨ψ|ˆR|r⟩⟨r|ϕ⟩
]∗
=
[
⟨ψ|ˆR
(∫
d3
r |r⟩⟨r|
)
|ϕ⟩
]∗
= ⟨ψ|ˆR|ϕ⟩∗
. (227)
6.3 Representação do Momento
A base {|p⟩} da representação do momento é obtida dos autokets do operador momento
ˆP:
ˆP|p⟩ = p|p⟩ , (228)
onde p é o vetor momento. A álgebra relevante a esta representação pode ser facilmente
inferida da representação de posição. As condições de ortonormalidade e completeza da base
|p⟩ do espaço de momento são dadas por
⟨p|p′
⟩ = δ(p − p′
) (229)
37](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-37-320.jpg)

![Essa função transforma da representação de momento para a representação de posição. A
função correspondente à transformação inversa, ⟨p|r⟩, é dada por
⟨p|r⟩ = ⟨r|p⟩∗
=
e−ip·r/
(2π )3/2
(239)
A quantidade |⟨r|p⟩|2
representa a densidade de probabilidade de encontrar a partícula na
região em torno de r onde seu momento é p.
Nota: Se a função de onda da posição
ψ(r) =
1
(2π )3/2
∫
d3
p eip·r/
Ψ(p) (240)
estiver normalizada
', sua transformada de Fourier
Ψ(p) =
1
(2π )3/2
∫
d3
r e−ip·r/
ψ(r) (241)
também deve estar normalizada, pois
∫
d3
p Ψ∗
(p) Ψ(p) =
∫
d3
p Ψ∗
(p)
[
1
(2π )3/2
∫
d3
r e−ip·r/
ψ(r)
]
=
∫
d3
r ψ(r)
[
1
(2π )3/2
∫
d3
p Ψ∗
(p) e−ip·r/
]
=
∫
d3
r ψ(r) ψ∗
(r) = 1 . (242)
Esse resultado é conhecido como o teorema de Parseval.
6.4.1 Operador Momento na Representação de Posição
Para determinar a forma do operador momento ˆP na representação de posição, vamos
calcular ⟨r|ˆP|ψ⟩:
⟨r|ˆP|ψ⟩ = ⟨r|ˆPˆI|ψ⟩ = ⟨r|ˆP
(∫
|p⟩⟨p| d3
p
)
|ψ⟩
=
∫
⟨r|ˆP|p⟩⟨p|ψ⟩ d3
p
=
∫
p ⟨r|p⟩⟨p|ψ⟩ d3
p
=
1
(2π )3/2
∫
p eip·r/
Ψ(p) d3
p . (243)
'
Isto é, se ∫
d3
r ψ(r) ψ∗
(r) = 1 .
39](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-39-320.jpg)
![Agora, como p eip·r/ = −i ∇eip·r/ , e usando (238), podemos reescrever (243) como
⟨r|ˆP|ψ⟩ = −i ∇
[
1
(2π )3/2
∫
eip·r/
Ψ(p) d3
p
]
= −i ∇
[∫
⟨r|p⟩⟨p|ψ⟩ d3
p
]
= −i ∇⟨r|ψ⟩ . (244)
Assim, ˆP é dado na representação de posição por
ˆP = −i ∇ . (245)
Suas componentes cartesianas são
ˆPx = −i
∂
∂x
, ˆPy = −i
∂
∂y
, ˆPz = −i
∂
∂z
(246)
Note que a forma do operador momento (245) pode ser obtida simplesmente aplicando o
operador gradiente ∇ a uma função de onda plana ψ(r, t) = A ei(p·r−Et)/ :
− i ∇ψ(r, t) = pψ(r, t) = ˆPψ(r, t) . (247)
Como ˆP = −i ∇, podemos escrever o operador Hamiltoniano ˆH = ˆP2/2m + ˆV na repre-
sentação de posição do seguinte modo:
ˆH = −
2
2m
∇2 + ˆV (r) = −
2
2m
(
∂2
∂x2
+
∂2
∂y2
+
∂2
∂z2
)
+ ˆV (r) (248)
onde ∇2 é o operador Laplaciano. Em coordenadas cartesianas é dado por ∇2 = ∂2
x +∂2
y +∂2
z .
6.4.2 Operador Posição na Representação de Momento
A forma do operador posição ˆR na representação do momento pode ser facilmente inferida
da representação de ˆP no espaço de posição. No espaço de momento o operador posição pode
ser escrito como
ˆRj = i
∂
∂pj
(j = x, y, z) , (249)
ou
ˆX = i
∂
∂px
, ˆY = i
∂
∂py
, ˆZ = i
∂
∂pz
(250)
6.4.3 Relações de Comutação Importantes
Vamos calcular o comutador [ ˆRj, ˆPk]. As ações separadas de ˆX ˆPx e ˆPx
ˆX sobre a função
de onda ψ(r) são dadas por
ˆX ˆPxψ(r) = ˆX
(
ˆPxψ(r)
)
= ˆX
(
−i
∂ψ(r)
∂x
)
= −i x
∂ψ(r)
∂x
(251)
40](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-40-320.jpg)
![e
ˆPx
ˆXψ(r) = ˆPx
(
ˆXψ(r)
)
= ˆPx (xψ(r)) = −i
∂
∂x
(xψ(r)) = −i ψ(r) − i x
∂ψ(r)
∂x
. (252)
Portanto, temos
[ ˆX, ˆPx]ψ(r) = ˆX ˆPxψ(r) − ˆPx
ˆXψ(r) = −i x
∂ψ(r)
∂x
+ i ψ(r) + i x
∂ψ(r)
∂x
= i ψ(r) ,
ou
[ ˆX, ˆPx] = i . (253)
Relações similares podem ser prontamente derivadas para as componentes y e z, de forma que
temos:
[ ˆX, ˆPx] = i , [ ˆY , ˆPy] = i , [ ˆZ, ˆPz] = i (254)
Note-se que
[ ˆX, ˆPy]ψ(r) = ˆX ˆPyψ(r) − ˆPy
ˆXψ(r)
= ˆX
(
−i
∂ψ(r)
∂y
)
− ˆPx (xψ(r)) = −i x
∂ψ(r)
∂y
+ i x
∂ψ(r)
∂y
= 0 ,
de modo que [ ˆX, ˆPy] = 0. Verica-se que
[ ˆX, ˆPy] = [ ˆX, ˆPz] = [ ˆY , ˆPx] = [ ˆY , ˆPz] = [ ˆZ, ˆPx] = [ ˆZ, ˆPy] = 0 , (255)
pois os graus de liberdade x, y e z são independentes. Note-se ainda que
[ ˆX, ˆY ]ψ(r) = ˆX( ˆY ψ(r)) − ˆY ( ˆXψ(r)) = ˆX (xψ(r)) − ˆY (yψ(r)) = xyψ(r) − yxψ(r) = 0 ,
e verica-se que
[ ˆX, ˆY ] = [ ˆX, ˆZ] = [ ˆY , ˆZ] = [ ˆZ, ˆX] = 0 . (256)
Além disso,
[ ˆPx, ˆPy]ψ(r) = ˆPx( ˆPyψ(r)) − ˆPy( ˆPxψ(r))
= −i
∂
∂x
(
−i
∂ψ(r)
∂y
)
−
[
−i
∂
∂y
(
−i
∂ψ(r)
∂x
)]
= − 2 ∂2ψ(r)
∂x∂y
+ 2 ∂2ψ(r)
∂y∂x
= 0 .
Verica-se também que
[ ˆPx, ˆPy] = [ ˆPx, ˆPz] = [ ˆPy, ˆPz] = [ ˆPz, ˆPx] = 0 . (257)
As relações em (254), (255), (256) e (257) podem ser agrupadas do seguinte modo:
[ ˆRj, ˆRk] = i δjk , [ ˆRj, ˆRk] = 0 , [ ˆPj, ˆPk] = 0 (258)
Essas relações são chamadas de relações canônicas de comutação.
41](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-41-320.jpg)
![Agora, usando a relação (66), temos
[ ˆX2
, ˆPx] = [ ˆX ˆX, ˆPx] = ˆX[ ˆX, ˆPx] + [ ˆX, ˆPx] ˆX = i ˆX + i ˆX = 2i ˆX ,
que leva a
[ ˆX3
, ˆPx] = [ ˆX2 ˆX, ˆPx] = ˆX2
[ ˆX, ˆPx] + [ ˆX2
, ˆPx] ˆX = i ˆX2
+ 2i ˆX2
= 3i ˆX2
,
o que, por sua vez, leva a
[ ˆX4
, ˆPx] = [ ˆX3 ˆX, ˆPx] = ˆX3
[ ˆX, ˆPx] + [ ˆX3
, ˆPx] ˆX = i ˆX3
+ 3i ˆX3
= 4i ˆX3
.
Continuando dessa forma, pode-se obter qualquer potência de ˆX. Podemos generalizar os
resultados acima por
[ ˆXn
, ˆPx] = i n ˆXn−1
. (259)
Resultado semelhante vale para potências de ˆPx:
[ ˆX, ˆPn
x ] = i n ˆPn−1
x . (260)
Seguindo o mesmo procedimento que levou a (253), pode-se obter uma relação de comutação
geral de ˆPx com uma função f( ˆX) arbitrária:
[f( ˆX), ˆPx] = i
df( ˆX)
d ˆX
=⇒ [ˆP, f( ˆR)] = −i ∇F( ˆR) (261)
onde F é uma função do operador ˆR.
Vamos calcular agora o comutador [ ˆX, ˆP] na representação do momento. O operador ˆX é
dado, na representação do momento pela relação (250). Temos, então,
[ ˆX, ˆP]ψ(p) = ˆX ˆPψ(p) − ˆP ˆXψ(p)
= i
∂
∂p
(pψ(p)) − i p
∂ψ(p)
∂p
= i ψ(p) + i p
∂ψ(p)
∂p
− i p
∂ψ(p)
∂p
= i ψ(p) ,
de forma que, na representação do momento,
[ ˆX, ˆP] =
[
i
∂
∂p
, ˆP
]
= i . (262)
Já vimos que na representação de posição,
[ ˆX, ˆP] =
[
ˆX, −i
∂
∂x
]
= i . (263)
A forma explícita dos operadores depende da representação adotada, mas as relações de co-
mutação para operadores são independentes da representação.
42](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-42-320.jpg)
![6.5 Operador de Paridade
A reexão espacial em torno da origem do sistema de coordenadas é denominada uma
operação de inversão ou de paridade. Essa transformação é discreta. O operador de paridade
ˆP é denido por sua ação nos kets |r⟩ do espaço de posição:
ˆP|r⟩ = | − r⟩ , ⟨r| ˆP†
= ⟨−r| , (264)
tal que
ˆPψ(r) = ψ(−r) . (265)
O operador de paridade é Hermitiano, ˆP† = ˆP, pois
∫
d3
r ϕ∗
(r)
[
ˆPψ(r)
]
=
∫
d3
r ϕ∗
(r)ψ(−r)
=
∫
d3
r ϕ∗
(−r)ψ(r) =
∫
d3
r
[
ˆPϕ(r)
]∗
ψ(r) . (266)
Da denição (265), temos
ˆP2
ψ(r) = ˆPψ(−r) = ψ(r) , (267)
e assim, ˆP2 é igual ao operador unidade:
ˆP2
= ˆI ou ˆP = ˆP−1
. (268)
Logo, o operador de paridade é unitário, já que seu adjunto Hermitiano é igual a seu inverso:
ˆP†
= ˆP−1
. (269)
Como ˆP2 = ˆI, os autovalores de ˆP são +1 e −1, com os autoestados correspondentes
ˆPψ+(r) = ψ+(−r) = ψ+(r) , ˆPψ−(r) = ψ−(−r) = −ψ−(r) . (270)
O autoestado |ψ+⟩ é denominado par e o autoestado |ψ−⟩ é ímpar. Logo, as autofunções do
operador de paridade têm paridade denida: são pares ou ímpares.
Como |ψ+⟩ e |ψ−⟩ são autoestados do mesmo operador Hermitiano ˆP, mas com autovalores
diferentes, esses autoestados devem ser ortogonais:
⟨ψ+|ψ−⟩ =
∫
d3
r ψ∗
+(−r) ψ−(−r) ≡ −
∫
d3
r ψ∗
+(r) ψ−(r) = −⟨ψ+|ψ−⟩ , (271)
e ⟨ψ+|ψ−⟩ é zero. Os estados |ψ+⟩ e |ψ−⟩ formam um conjunto completo, já que qualquer
função pode ser escrita como ψ(r) = ψ+(r) + ψ−(r), o que conduz a
ψ+(r) =
1
2
[ψ(r) + ψ(−r)] , ψ−(r) =
1
2
[ψ(r) − ψ(−r)] . (272)
Como ˆP2 = ˆI, temos
ˆPn
=
{
ˆP quando n é ímpar,
ˆI quando n é par.
(273)
43](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-43-320.jpg)


![trabalho com a álgebra de quantidades matriciais. No contexto da mecânica matricial, lida-se
com quantidades que não comutam, pois o produto de matrizes não comuta. Esta é uma
característica essencial que distingue a mecânica matricial da mecânica clássica, onde todas as
quantidades comutam. As componentes da posição e do momento não comutam no contexto
da mecânica matricial, sendo relacionadas pela relação de comutação [ ˆX, ˆPx] = i . A mesma
coisa se aplica às componentes do momento angular. O papel desempenhado pelas relações de
comutação dentro do contexto da mecânica matricial é similar ao papel desempenhado pelas
condições de quantização de Bohr na teoria atômica. A mecânica matricial de Heisenberg
exige, portanto, a introdução de arsenal matemático espaços vetoriais lineares, espaço de
Hilbert, álgebra de comutadores e álgebra matricial que é inteiramente diferente do arsenal
matemático da mecânica clássica.
7.2 Mecânica Ondulatória
A representação do formalismo da mecânica quântica numa base contínua produz uma
problema de autovalor não na forma de uma equação matricial, como na formulação de Hei-
senberg, mas na forma de uma equação diferencial. A representação da equação de autovalor
(283) no espaço de posição fornece
⟨r| ˆH|ψ⟩ = E⟨r|ψ⟩ . (286)
Como mostrado em (248), o Hamiltoniano é dado por − 2∇2/(2m) + ˆV (r) na representação
de posição, de forma que podemos escrever (286) numa forma mais familiar:
−
2
2m
∇2
ψ(r) + ˆV (r)ψ(r) = Eψ(r) (287)
onde ⟨r|ψ⟩ = ψ(r) é a função de onda do sistema. Essa equação diferencial é conhecida como
a equação de Schrödinger. Suas soluções fornecem o espectro de energia do sistema bem como
suas funções de onda. Essa formulação da mecânica quântica na representação de posição é
chamada de mecânica ondulatória.
Ao contrário de Heisenberg, Schrödinger tomou um ponto de partida inteiramente diferente
em sua busca de uma justicação teórica para as idéias de Bohr. Ele partiu da hipótese onda-
partícula, formulada por de Broglie, e a estendeu aos elétrons em órbita do núcleo. Schrödinger
queria encontrar uma equação que descrevesse o movimento do elétron dentro do átomo. Aqui
o foco está no aspecto ondulatório do elétron. A condição de quantização de Bohr, L = n , é
equivalente à relação de de Broglie, λ = 2π /p. Para estabelecer essa conexão, basta que se
faça três considerações:
(a) o comprimento de onda da onda associada ao elétron em órbita está conectada ao mo-
mento linear do elétron por λ = 2π /p;
(b) a órbita do elétron é circular, e
(c) a circunferência da órbita do elétron é um múltiplo inteiro do comprimento de onda do
elétron, isto é, 2πr = nλ. Isto leva prontamente a 2πr = n (2π /p), ou n = np ≡ L.
Isso signica que para cada órbita existe apenas um comprimento de onda associado
com o elétron orbitante.
Assim a condição de quantização de Bohr implica, em essência, em uma unicidade da
função de onda para cada órbita do elétron.
46](https://image.slidesharecdn.com/matematicaquantica-170808180958/85/Matematica-quantica-46-320.jpg)
















































