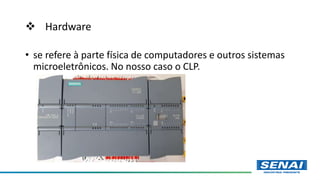
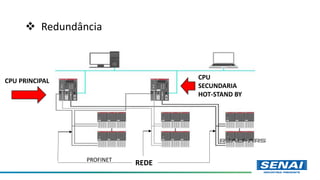
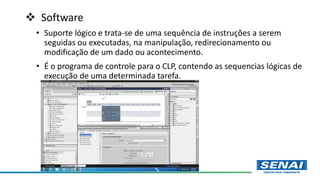
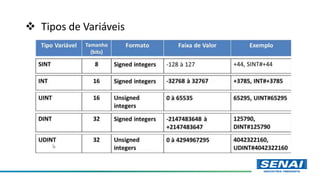
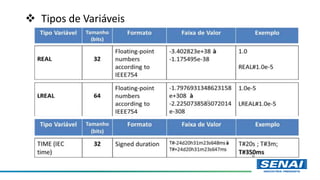
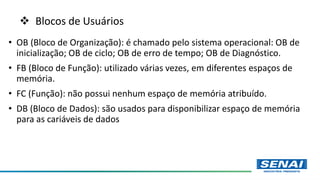
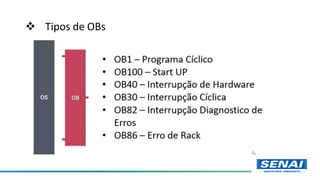
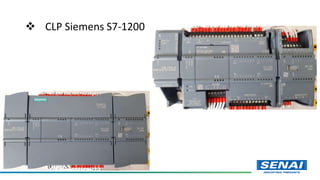
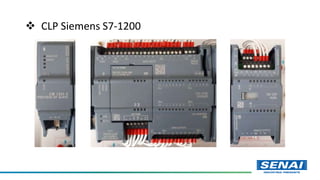
O documento descreve os conceitos básicos de automação industrial utilizando controladores lógicos programáveis (CLP). Apresenta o que é automação e como surgiu o CLP, definindo-o como um equipamento eletrônico especializado para controle e monitoramento de processos industriais através de programas. Detalha também aspectos do hardware, software, linguagens de programação e conceitos relacionados a variáveis e blocos de usuários em CLPs.