Este documento fornece instruções passo-a-passo sobre como separar páginas numeradas e não numeradas no Microsoft Word. Explica como usar quebras de seção para dividir o documento em diferentes seções e como desvincular a numeração de páginas entre seções para que apenas algumas seções sejam numeradas.




![ Thais on January 14, 2013 at 9:23 am said:
No meu computador a opção também não está habilitada mas não consigo
fazer esta alteração, porque quando eu mudo um, muda todos
Reply ↓
6. Leoni Cordeiro on November 28, 2012 at 8:25 pm said:
Walter…preciosas dicas! Muito obrigada por compartilhar seu conhecimento!! Abraços
Reply ↓
o Walter on November 29, 2012 at 4:49 pm said:
Obrigado, Leoni. Que bom que lhe foi útil.
[]s,
Reply ↓
7. jonas almada on January 26, 2013 at 10:03 am said:
Prefeita a dica, nunca escrevo nos comentários mas este aqui não poderia deixar de
agradeçer pela ajuda preciosa.
Reply ↓
o Walter on January 28, 2013 at 7:27 am said:
Obrigado, Jonas.
Reply ↓
8. ROSIANE on March 2, 2013 at 9:17 am said:](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-6-320.jpg)
![Obrigada professor,muito boa sua explicação,simples porém de grande ajuda.
Abraços.
Reply ↓
o Walter on March 5, 2013 at 9:58 am said:
Que bom que lhe ajudou. Abraço.
Reply ↓
9. Maria Bethânia on April 25, 2013 at 3:24 pm said:
Nossa!!!!!!!!!!!! Tudo que eu precisava!!!
Obrigada por ser sucinto e eficiente.
Valeu.
Reply ↓
10. Dani on May 24, 2013 at 2:57 pm said:
Não consigo encontrar a opção vincular com anterior no meu word 2007,pois depois que
faço a parte de quebra de seção quando eu vou colocar a numeração fica errado do meu
jeito,começa a numerar na primeira pag…por favor me ajude ^^
Reply ↓
o Walter on May 27, 2013 at 9:02 am said:
Dani, veja isso: http://www.infowester.com/tutpagword.php . Acho que vai lhe
ajudar.
[]s,
Reply ↓
11. fabiana silva lopes on September 29, 2013 at 4:28 pm said:](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-7-320.jpg)

![15. Carlos Vinicius on October 31, 2014 at 2:57 pm said:
O mulher tutorial de paginação encontrado na net. Valeu, bom trabalho, ajudou bastante.
Reply ↓
o Walter on November 1, 2014 at 10:36 am said:
Que bom, Carlos Vinicius, que lhe foi útil! Obrigado.
Reply ↓
16. Bernardino Coelho da Silva on November 9, 2014 at 7:04 am said:
Melhor e mais simples explicação sobre o tema que encontrei. Grato!
Reply ↓
17. Luisa on November 23, 2014 at 11:40 am said:
Professor,
Consegui desvincular e tudo mais. Entretando, quando coloco a numeração na página, fica a
mesma numeração pra todas as páginas. O que estou fazendo de errado?
Reply ↓
o Walter on November 24, 2014 at 9:30 am said:
Luisa, provavelmente, se a numeração está sequencial, significa que não foram
criadas duas seções para o documento. Dê uma pesquisada sobre como criar seções
no documento word, acho que vai lhe ajudar.
[],
Reply ↓](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-9-320.jpg)
![18. Hellan Rodrigues da Silva on December 17, 2014 at 8:58 am said:
Ótimo post, já estava desesperado procurando por algum artigo que me ajudasse com a
paginação. Valeu mesmo
Reply ↓
19. Jonathan on February 17, 2015 at 2:23 pm said:
Caro professor,
Tua postagem foi extremamente útil, mas estou com o seguinte problema: tenho de incluir a
numeração das páginas em um arquivo que contém cinco seções diferentes, e o Word só
começa a numerar a partir da quinta seção, como página 1. Eu quero justamente incluir a
paginação a partir da seção 2, mas não consigo, pois a partir da seção 5 permanece a mesma
numeração anterior. Já tentei (dezenas de vezes) vincular uma seção à outra, mas isso não
muda nada. Podes me informar, por favor, como posso criar um texto com apenas duas
seções, extinguindo as outras três e mantendo a mesma paginação a partir da segunda seção?
Ressalto que estou revisando o texto para outra pessoa, que foi quem criou essas inúmeras
seções. Muito obrigado!
Reply ↓
o Walter on February 28, 2015 at 4:44 pm said:
Jonathan, em cada versão do Word resolvem complicar ainda mais algumas coisas
que são muito simples, por isso essas ferramentas nos dão tanta dor de cabeça. Sobre
a exclusão de seções, veja https://support.office.com/pt-br/article/Excluir-uma-
quebra-de-seção-1e12f200-7215-4688-a55a-5130f383dc5f?ui=pt-BR&rs=pt-
BR&ad=BR.
[],
Reply ↓
20. Frei FErnâncio on February 22, 2015 at 4:39 pm said:
ok, tudo certo, valeu e bons ensinamentos para o povo!
Reply ↓](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-10-320.jpg)


















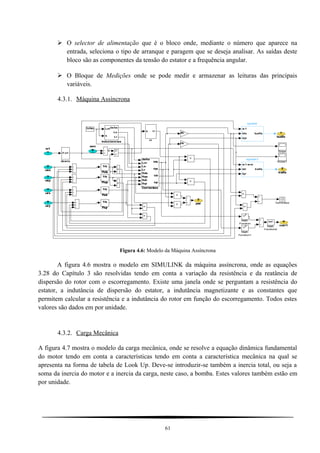
![modular do escorregamento, mas, como este escorregamento é negativo nesta zona, a velocidade
deve aumentar.
Nas características se mostram alguns valores para os quais é importante para determinar a
sua expressão. É de grande importância conhecer o binário máximo do motor, pois define sua
capacidade de sobrecarga. Este é o valor para o qual a inclinação característica muda de positivo a
negativo.
Como o binário electromagnético é proporcional à potência consumida na resistência
s
R'
2
de acordo com a equação 1.15, o binário máximo ocorre quando a energia consumida por esta
resistência é máxima, o que acontece quando seu valor óhmico é igual a do resto da impedância do
circuito equivalente aproximada do tipo em L, ou seja, quando,
2'2
1
2
'
)( drds XXR
s
R
++=
e,
portanto o escorregamento para o binário máximo, trabalhando como motor é:
2'2
1
'
2
)( drds
M
XXR
R
s
++
= (1.20)
Como:
2'
1
2
1 )( drds XXR +<<
Então:
)( '
1
2
'
drds
M
XX
R
s
+
≈ (1.21)
Substituindo a equação 1.20 em 1.18 se obtém o valor do binário máximo como motor é:
])(.[.2
.3
2'
1
2
1
2
1
2
1
max
drdsS
m
XXRR
V
T
+++
=
ω
(1.22)
É aproximadamente:
).(.2
.3
'
1
2
1
max
drdsS XX
V
T
+
≈
ω
(1.23)
Como gerador, o escorregamento é negativo e a expressão fica então da seguinte forma:
])(.[.2
.3
2'
1
2
1
2
1
2
1
max
drdsS
g
XXRR
V
T
++−
=
ω
(1.24)
12](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-33-320.jpg)
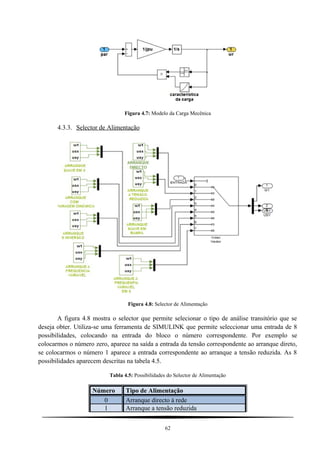
![Vesse que o binário máximo como motor é ligeiramente menor que o binário máximo como
gerador.
Se dividir-se a equação 1.18 com a 1.24 se obtém:
[ ]
2'2
'
2
1
'
22'2
11
max
)()(
).()(.2
drds
drds
m
em
XX
s
R
R
s
R
XXRR
T
T
+++
+++
=
Utilizando esta expressão e fazendo
drds XX
R
a '
1
+
= , obtém-se:
[ ]
+++
++
=
s
s
s
s
aa
aa
T
T
M
M
em
.1.2
1.2
2
2
max (1.25)
Em muitos casos, sobre tudo nas máquinas de potência média e grande, R1 que é quase
igual à resistência do estator, é muito pequena em comparação com a reactância total e o
coeficiente “a” é desprezível, sendo a equação 1.25 de uma forma aproximada, conhecida como
Fórmula de Kloss:
s
s
s
sT
T
M
M
em
+
≈
2
max (1.26)
CAPÍTULO II
ARRANQUE E PARAGEM DE MOTORES ASSINCRONOS
2.
2.1. INTRODUÇÃO
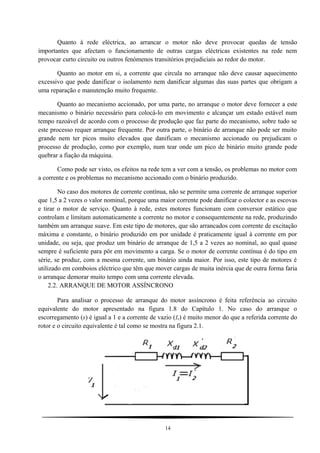
O processo que decorre desde que um motor eléctrico é ligado à rede, até atingir a sua
velocidade e corrente estável de acordo ao mecanismo accionado, é chamado de Processo de
Arranque e impõe ao motor e a seu sistema de alimentação e controlo determinados os requisitos
gerais para qualquer motor e específicos dependendo do tipo de motor. Estes requisitos podem ser
classificados em três tipos:
Os que impõe a rede eléctrica;
Os que impõe o próprio motor;
Os impostos pela carga mecânica ao mecanismo accionado acoplado ao eixo do motor.
13](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-34-320.jpg)












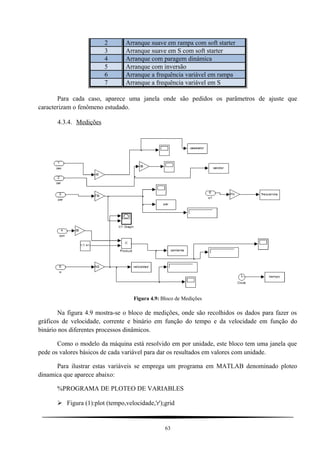
![L L L L L LAA BB CC fs m sm= = = + = (3.4a)
O mesmo pode ser dito para indutâncias próprias do rotor:
L L L L L Laa bb cc fr m rm= = = + = (3.4b)
Onde:
fyfs LeL – São as indutâncias de filtração do estator e o rotor;
mL – Indutância magnetizante correspondente ao fluxo mutua que atravessa ambos
os enrolamentos. Devido à simetria magnética existente tanto no estator como no rotor, estas
indutâncias são constantes e não dependem da posição de este último.
Pela mesma causa, as indutâncias mútuas entre os três enrolamentos do estator também são
iguais e independentes da posição:
2
)
3
2
(cos m
mCBBCCAACBAAB
L
LLLLLLL −=======
π
(3.5a)
O mesmo acontece com o rotor:
2
)
3
2
(cos. m
mcbbccaacbaab
L
LLLLLLL −=======
π
(3.5b)
A indutância mutua entre os enrolamentos do estator e os do rotor dependem entre si da
posição e são iguais a:
)(cos. θmCcBbAa LLLL === (3.6a)
)
3
2
(cos.
π
θ +=== mCaBcAb LLLL (3.6b)
)
3
2
(cos.
π
θ −=== mCbBaAc LLLL (3.6c)
Substituindo nas equações (1.10), (1.9) e (1.8) em (1.6) e (1.7) obtém-se:
)]
3
2
(cos.)
3
2
(cos.)(cos..[.
π
θ
π
θθϕ −++++= cbamASA iiiLiL (3.7a)
)]
3
2
(cos.)(cos.)
3
2
(cos..[.
π
θθ
π
θϕ +++−+= cbamBSB iiiLiL (3.7b)
)](cos.)
3
2
(cos.)
3
2
(cos..[. θ
π
θ
π
θϕ cbamCSC iiiLiL +−+++= (3.7c)
aRCBAma iLiiiL .)]
3
2
(cos.)
3
2
(cos.)(cos..[ +++−+=
π
θ
π
θθϕ (3.8a)
32](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-53-320.jpg)
![bRCBAmb iLiiiL .)]
3
2
(cos.)(cos.)
3
2
(cos..[ +−+++=
π
θθ
π
θϕ (3.8b)
cRCBAmc iLiiiL .)](cos.)
3
2
(cos.)
3
2
(cos..[ ++++−= θ
π
θ
π
θϕ (3.8c)
Nestas equações:
L L LS fs M= + (3.9a)
L L LR fr M= + (3.9b)
L LM m=
3
2
. (3.9c)
Estas indutâncias são as mesmas que aparecem no circuito equivalente do motor.
Como se pode ver, as equações das ligações do fluxo são extremamente complicadas,
principalmente porque são funções não lineares da posição do rotor θ E ao aplicar a equação da
tensão 1, onde aparece a sua derivada a complicação torna-se ainda maior. Então, explica-se os
passos seguintes para simplificar essas equações e torná-las mais fáceis de gerenciar.
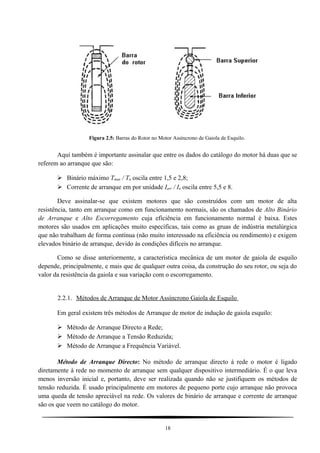
Devido ao carácter trifásico deste motor, tanto o rotor como o estator, é um primeiro passo
para simplificar as expressões das equações, desenvolver um modelo baseado no chamado Vector
Espacial Trifásico na qual considera uma única entidade matemática das três fases. A sua definição
para o caso das correntes é a seguinte:
)...(
3
2 2
CBA iaiaii
++= (3.10)
Onde:
iA, iB e iC – São as correntes para as três fases e definem também os três vectores
unitários.
Para a fase A:
o
j
e 0
1 =
Para a fase B:
o
j
ea 120
=
Para a fase C:
o
j
ea 1202 −
=
A representação gráfica do vector se mostra na figura 3.2.
33](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-54-320.jpg)







![quatro incógnitas eléctricas que são as das concatenações do fluxo do estator e as do rotor e uma
incógnita mecânica que é a velocidade do rotor:
α
β
β
σ
β
σ
β
α
α
σ
α
σ
β
β
σ
β
σ
β
α
α
σ
α
σ
α
ϕω
ϕ
ϕϕ
ϕω
ϕ
ϕϕ
ϕ
ϕϕ
ϕ
ϕϕ
Rm
R
R
S
R
S
M
R
Rm
R
R
S
R
S
M
R
S
R
M
S
S
R
S
S
S
R
M
S
S
R
S
S
Pdt
d
L
R
L
R
Pdt
d
L
R
L
R
dt
d
L
R
L
R
u
dt
d
L
R
L
R
u
.
2
..0
.
2
..0
..
..
−++−=
+++−=
+−=
+−=
(3.28)
A quinta equação que se necessita é a equação mecânica do movimento do rotor para o qual
se deve determinar primeiro a expressão do binário electromagnético Tem produzido por motor
assíncrono. Para fazê-lo devem determinar-se as relações da potencia.
A potência de entrada no motor esta dada por:
CCBBAAi iuiuiup ... ++= (3.29)
Agora, tanto para as tensões como para as correntes e concatenações do fluxo aplicam-se
estas relações:
).(.
2
3
).(.
2
3
)(.
2
3
2
xax
xax
xx
C
B
A
ℜ=
ℜ=
ℜ=
(3.30)
Substituindo estas expressões para tensão e corrente em 3.29 obtém-se finalmente:
[ ]...
2
3 *
sSi iup
ℜ= (3.31)
Onde:
ip – Potencia de entrada;
*
Su
– Conjugado do vector da tensão em coordenadas do estactor;
ℜ– Potencia de entrada;
ip – Parte real.
41](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-62-320.jpg)
![Estas equações se cumprem para qualquer sistema de coordenadas, mais como o objectivo é
calcular o binário que se exerce sobre o rotor deve trabalhar-se com as equações em coordenadas do
rotor e não em coordenadas do estator como as equações 3.19 e 3.22. Em seguida os passos para
obter as equações em coordenadas do rotor obtêm-se os seguintes resultados:
dt
d
iR
j
dt
d
iRu
R
RR
RR
R
Sr
R
SR
SS
R
S
)(
)(
)(
)(
)()(
.0
...
ϕ
ϕω
ϕ
+=
++=
(3.32)
Se esta expressão é aplicada a cada um dos termos no lado direito da primeira equação 3.32
obtém-se, para o primeiro termo, a energia dissipada em forma de calor, para o segundo a energia
armazenada no campo e para a terceira a energia convertida na forma mecânica, que é a interessa
para determinar o binário electromagnético. Por tanto, pode-se argumentar que a diferencial de
energia convertida na forma mecânica é igual a:
[ ]dtijdW SSRmec .....
2
3 *
ϕω
−ℜ= (3.33)
Supondo-se um deslocamento angular virtual igual a dθ a diferencial da energia mecânica,
também pode ser expressa como:
dtTdTdW rememmec ... ωθ == (3.34)
Combinando as equações 3.33 e 3.34:
[ ]SSem ijT
...
2
3 *
ϕ−ℜ= (3.35)
Decompondo os vetores em seus componentes reais e imaginários:
βα
βα ϕϕϕ
ssS
ssS
ijii
j
.
.*
+=
−=
(3.36)
Então:
( ) [ ]SSssssem iiiT
..
2
3
...
2
3 *
ϕϕϕ αββα ℑ=−= (3.37)
Onde:
ℑ– Parte imaginaria.
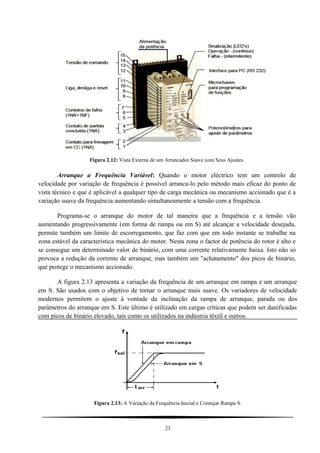
Esta expressão deduz-se para uma máquina de 2 polos, portanto se a máquina tiver P polos,
a expressão será:
42](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-63-320.jpg)
![[ ] ( )αββα ϕϕϕ ssssSSem ii
P
i
P
T ...
2
.
2
3
..
2
.
2
3 *
−=ℑ=
(3.38)
Esta equação é aplicável para qualquer sistema de coordenadas. Também é possível
expressa-la com as variáveis em diferentes lados.
A equação mecânica do movimento do motor e do seu mecanismo accionado ou carga
mecânica é:
)(
2
. mmec
m
em T
dt
d
P
JT ω
ω
+= (3.39)
Onde:
Tmec (ωm) – Binário mecânico da carga, que em geral, é a função da velocidade.
Substituindo 38 em 39 obtém-se:
( ) )(
2
....
2
.
2
3
mmec
m
ssss T
dt
d
P
Jii
P
ω
ω
ϕϕ αββα +=− (3.40)
As equações dinâmicas do movimento que constituem finalmente o modelo matemático do
motor (expressas em coordenadas do estator) seriam além da equação 3.40, as equações 3.28. As
expressões das tensões de entrada são:
).(..2
).(cos..2
1
1
tsenUu
tUu
fS
fS
ω
ω
β
α
=
=
(3.41)
Onde:
Uf – Tensão da fase do motor;
ω1 = 2.π.f1 e f1 – Frequência da rede.
3.3. CONSIDERAÇÃO DA VARIAÇÃO DOS PARÂMETROS DO MOTOR
Como foi explicado no capítulo anterior, as barras que compõe a gaiola do rotor dos motores
assíncronos são fabricados para apresentar uma resistência relativamente elevada no arranque e
baixo durante o funcionamento normal. Isto é conseguido acentuando o chamado efeito pelicular
fazendo com que as barras sejam altas e estreitas ou com duas gaiolas de rotor.
Agora, como a gaiola está composta por barra e o anel, nesta ultima resistência praticamente
não varia, pode dizer-se que a resistência do rotor tem uma componente constante, a qual não
depende da frequência do rotor e do escorregamento.
Por outro lado, a relação entre a resistência da corrente alterna e a resistência da corrente
contínua é a seguinte:
43](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-64-320.jpg)












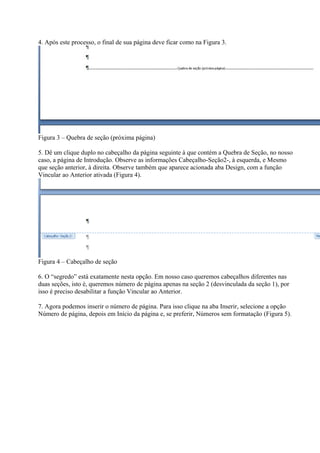
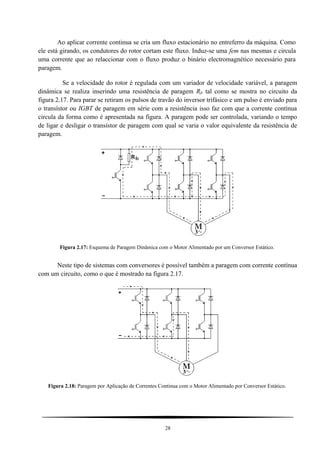
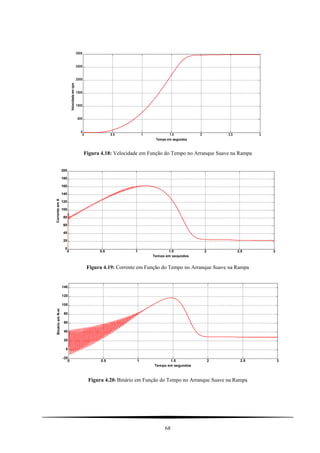
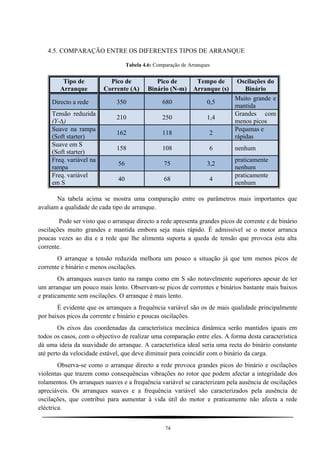
![Potência em kW 18,5
Velocidade em rpm 2935
Corrente em A 33
Rendimento nominal em % 91,5
Factor de potência 0,89
Iarr/In 8,2
Tarr/Tn 2,6
Tmax/Tn 3,3
Inércia do motor em kg-m2
0,054
Inércia da carga em kg-m2
0,2
Seguindo o algoritmo explicado no capítulo anterior calcularam-se os valores bases e os
parâmetros do motor assíncrono com os resultados dos valores mostrados na tabela 4.2 e os valores
dos parâmetros na tabela 4.3.
Tabela 4.2: Valores Base
Tensão de base em V 326,6
Corrente base em A 46,67
Velocidade base em rpm 3000
Impedância base em ohms 7
Binário base em N-m 72,58
Inércia base em kg-m2
7,31.10-4
Tabela 4.3: Parâmetros do Motor Assíncrono
Parâmetro Valor Absoluto Por Unidade
Constantes da resistência do rotor RR0 e RRV em
ohms
[0,1369 0,1457] [0,0196 0,0208]
Inductância de dispersão do estator LfS em mH 1,3 0,0582
Constantes da inductância de dispersão do rotor
Lf0y LfV em mH
[0,876 1] [0,0391 0,0462]
Inductância magnetizante Lm em mH 46,7 2,0934
Resistência do estator RS em ohms 0,155 0,022
Inércia total en kg-m2
0,1240 169,52
4.2. CARACTERÍSTICAS DA CARGA MECÁNICA
As características do processo do arranque da moto bomba dependem do binário mecânico
resistivo Tmec que a bomba impõe ao motor, que é diferente para cada valor de velocidade rω . Isto
é porque a equação mecânica fundamental que descreve este processo é a seguinte:
dt
d
JTT r
trmecem
ω
ω .)( += (4.1)
58](https://image.slidesharecdn.com/tesefinalscheldsewellington-150421004300-conversion-gate01/85/Arranque-e-Paragem-de-Motores-Assincronos-79-320.jpg)


























![[Motores sincronos e assincronos]](https://cdn.slidesharecdn.com/ss_thumbnails/motoressincronoseassincronos-160602205614-thumbnail.jpg?width=640&height=640&fit=bounds)