Baixar para ler offline

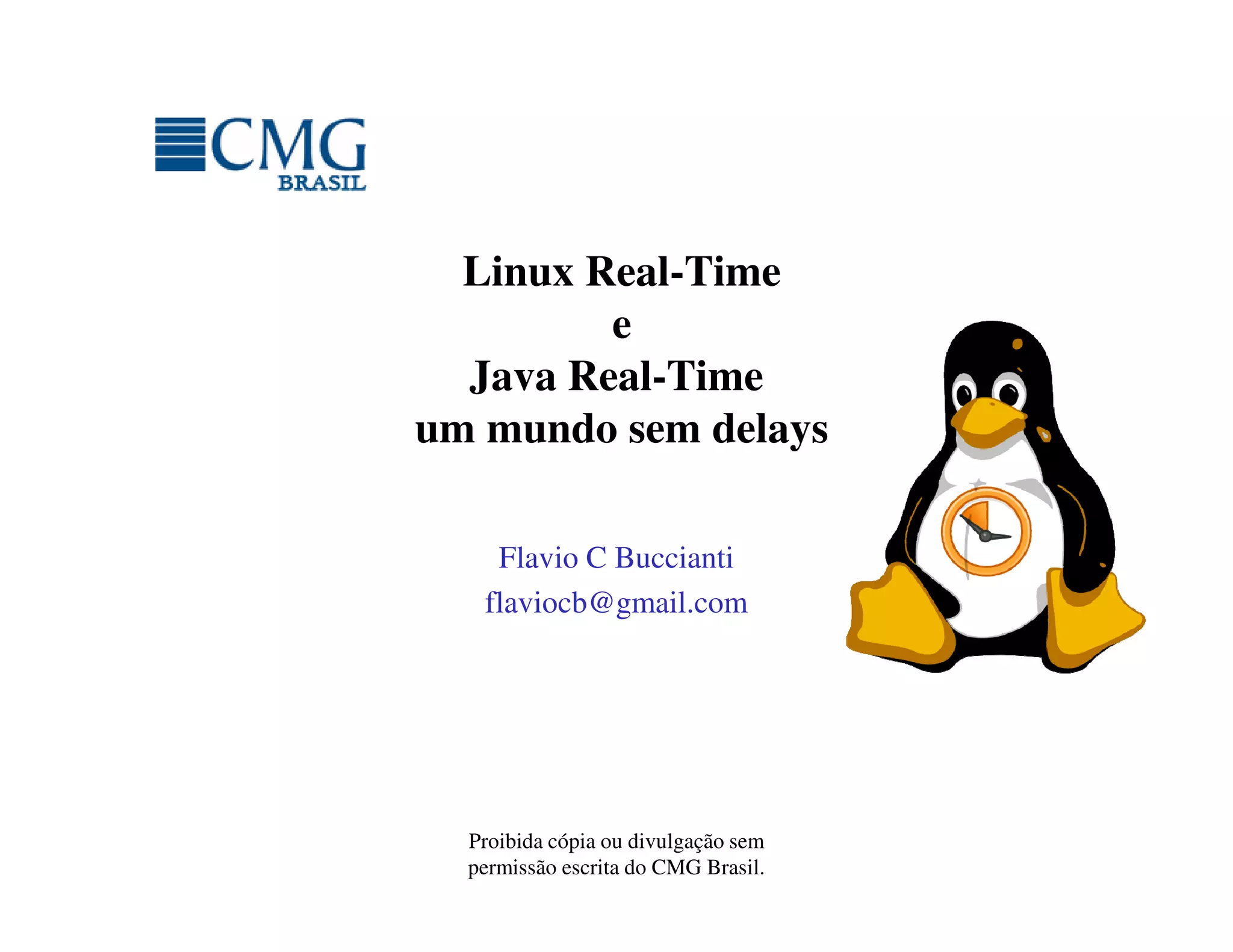

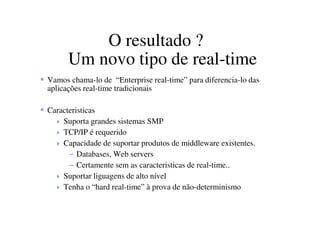

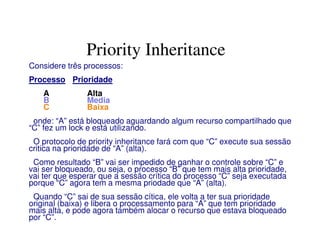
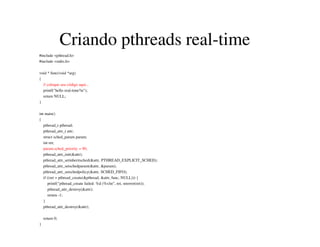
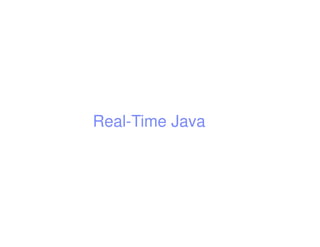
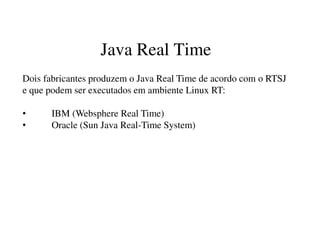
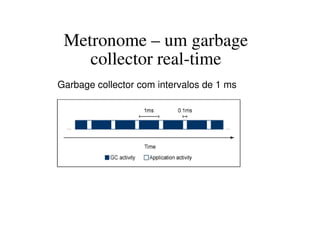
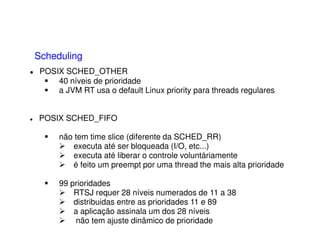
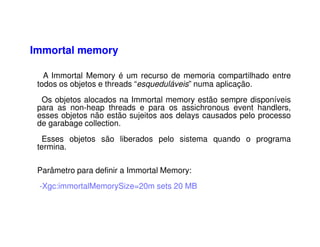
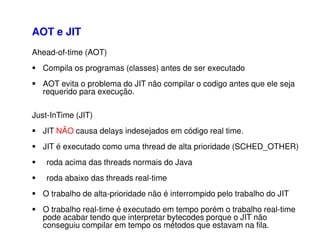
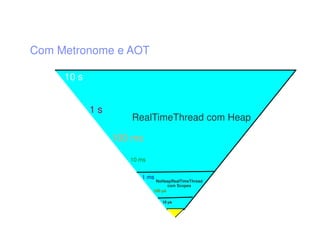
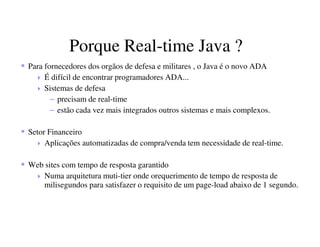
![char size = 'L' ;
char [ ] sizes = { 'S' , 'M' , 'L' } ;
0
1
2
0x21B08
'S'
'M'
'L'
'L'
sizes [ ]
size
HeapStack
Variáveis primitivas e matrizes
char [ ]](https://image.slidesharecdn.com/36dwtqm0tcjluvzrwa44-140521171621-phpapp01/85/Linux-Real-Time-e-Java-Real-Time-um-mundo-sem-delays-por-Flavio-Buccianti-23-320.jpg)
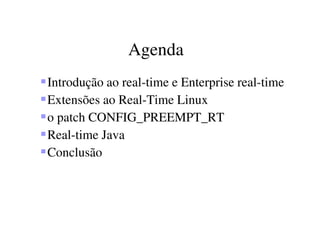
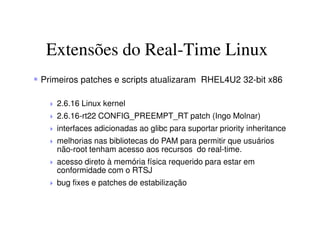
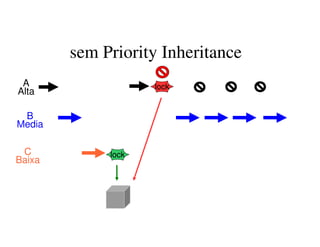
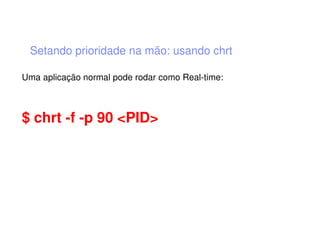
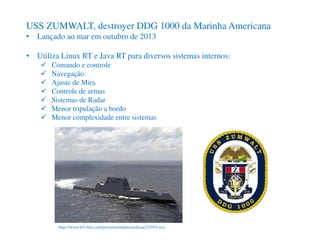
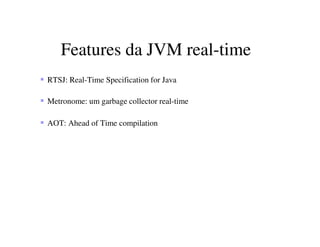
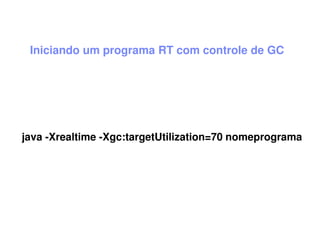
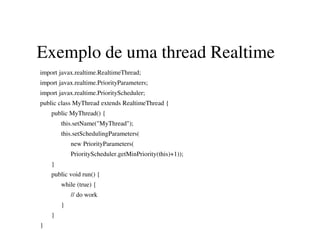
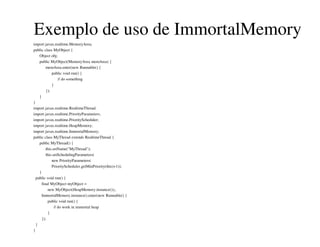
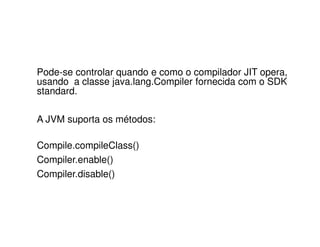
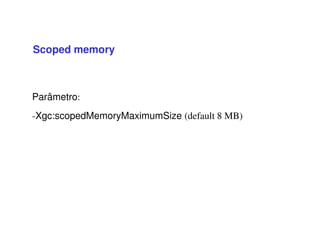
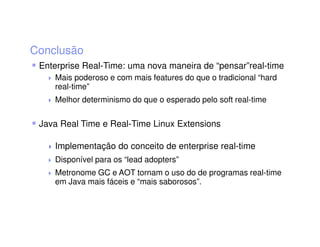
![Shirt myShirt = new Shirt ( “Polo”, 'M' ) ;
Shirt [ ] shirts = { new Shirt (“Polo”, 'S') ,
new Shirt (“Oxford”, 'M' ) ,
new Shirt (“Polo”, 'L' )} ;
0
1
2
0x23162shirts [ ]
myShirt
Heap
Stack
Variáveis Reference e matrizes
0x0088
0x0432
0x0776
0x73128
Polo
M
Polo
Polo
Oxford
S
M
L](https://image.slidesharecdn.com/36dwtqm0tcjluvzrwa44-140521171621-phpapp01/85/Linux-Real-Time-e-Java-Real-Time-um-mundo-sem-delays-por-Flavio-Buccianti-24-320.jpg)

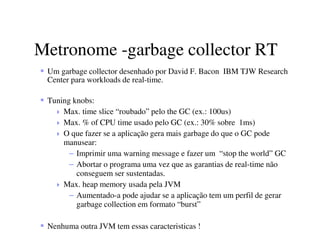
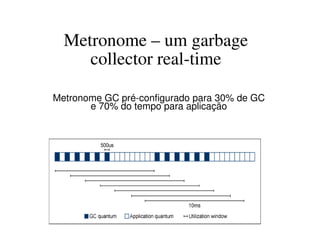

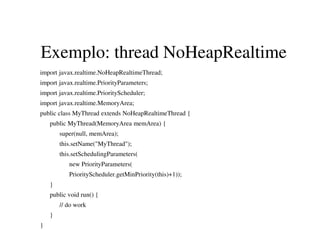
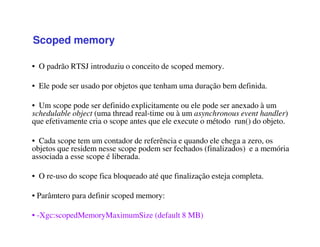
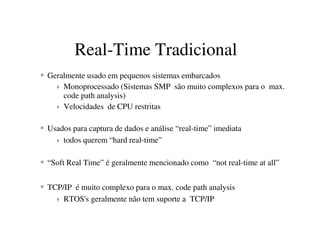
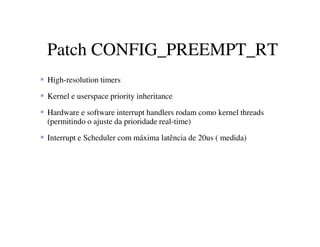
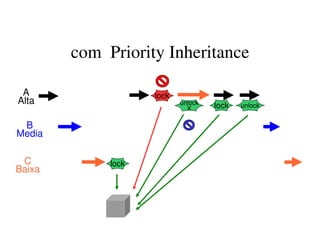
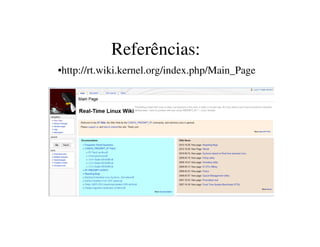
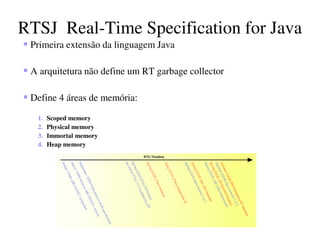
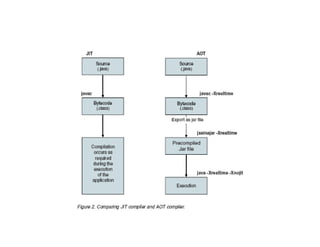
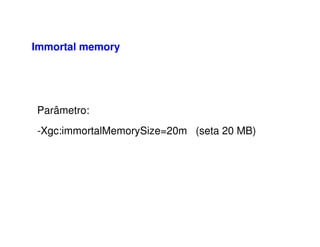
![Exemplo de uso de ScopedMemory
import javax.realtime.RealtimeThread;
import javax.realtime.PriorityParameters;
import javax.realtime.PriorityScheduler;
import javax.realtime.LTMemory;
import javax.realtime.ScopedMemory;
import javax.realtime.SizeEstimator;
public class MyThread extends RealtimeThread {
static final int load = 1000000;
public MyThread() {
this.setName("MyThread");
this.setSchedulingParameters(
new PriorityParameters(
PriorityScheduler.getMinPriority(this)+1));
this.setDaemon(true);
}
public void run() {
SizeEstimator size = new SizeEstimator();
/**
* Calulate the memory footprint of all objects
*/
size.reserve(long[][].class, load);
size.reserve(long[].class, load * 50);
ScopedMemory memArea = new LTMemory(size);
while (true) {
/* A scoped memory area is being used. Normally the garbage collector would have to deal with the
* unused classes, but with scoped memory we are throwing away all of the objects in the scope when
* we exit the enter() method. This will put much less load on the garbage collector. */
memArea.enter(new Runnable() {
public void run() {
int count = 0;
long[][] array = new long[load][];
for (int n = 0; n < array.length; n++) {
array[count] = new long[50];
}
});
}
}}](https://image.slidesharecdn.com/36dwtqm0tcjluvzrwa44-140521171621-phpapp01/85/Linux-Real-Time-e-Java-Real-Time-um-mundo-sem-delays-por-Flavio-Buccianti-42-320.jpg)

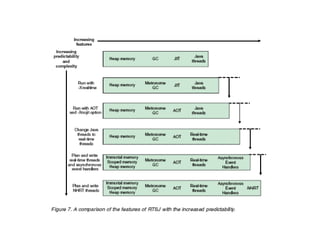
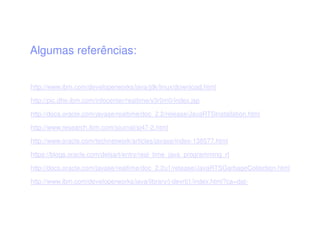

[1] O documento discute Linux e Java Real-Time, incluindo extensões para fornecer garantias de latência em sistemas empresariais complexos. [2] É apresentado o patch CONFIG_PREEMPT_RT para o kernel Linux que fornece latências abaixo de 20us e prioridade herdada para threads. [3] O Java Real-Time Specification é discutido juntamente com o garbage collector Metronome e diferentes áreas de memória como imortal e de escopo.


































![[Cliqueapostilas.com.br] arquitetura-de-sistemas-operacionais](https://cdn.slidesharecdn.com/ss_thumbnails/cliqueapostilas-211215021748-thumbnail.jpg?width=640&height=640&fit=bounds)
































