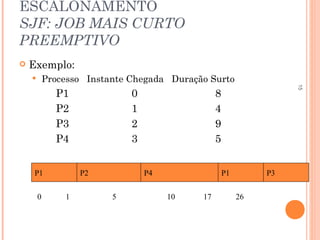
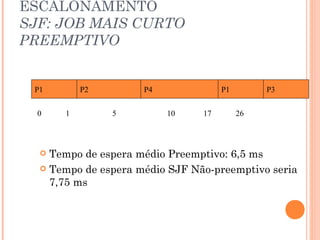
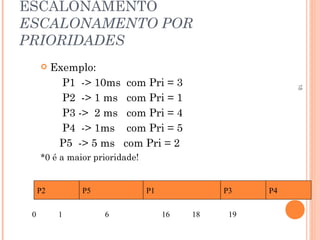
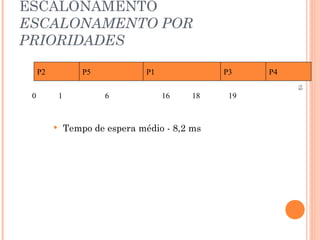
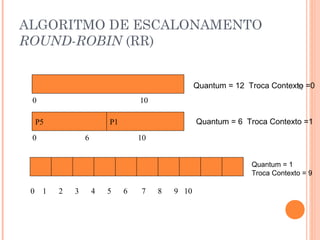
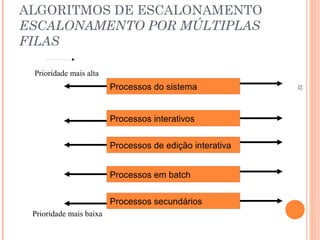
O documento discute vários algoritmos de escalonamento de processos em sistemas operacionais. Aborda os conceitos de escalonador de CPU, escalonamento preemptivo e não-preemptivo, e características a serem consideradas na seleção de um algoritmo de escalonamento, como utilização da CPU, número de processos completados e tempos de resposta, retorno e espera. Em seguida, explica em detalhes algoritmos como FCFS, SJF, escalonamento por prioridades, Round Robin e escalonamento por múltiplas filas.