Este documento trata de fundamentos de topografia e apresenta capítulos sobre sistemas de coordenadas, erros de observação, escalas, normalização, medição de distâncias e direções, orientação, levantamento topográfico planialtimétrico, nivelamento e representação do relevo.








































![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
44
Como
ϕ = ω . t (5.15)
e
ω = 2πf (5.16)
Então a equação (5.14) é reescrita como:
y = A sen (2 π f t) (5.17)
O efeito de uma variação de fase (Δϕ) é igual a uma variação de tempo (Δt), para o
mesmo sinal. Utilizando as equações (5.13) e (5.14) estas variações ficam assim expressas:
y = A . sen [ω (Δt + t)] (5.18)
ou
y = A . sen (Δϕ + ϕ), (5.19)
Onde:
Δt = Variação do tempo;
Δϕ = Variação de fase.
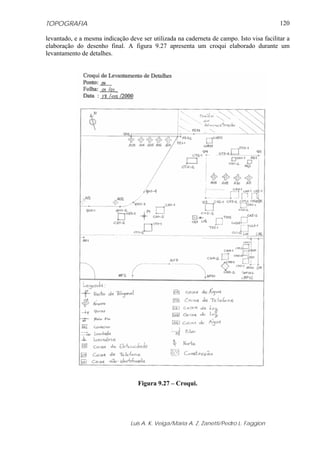
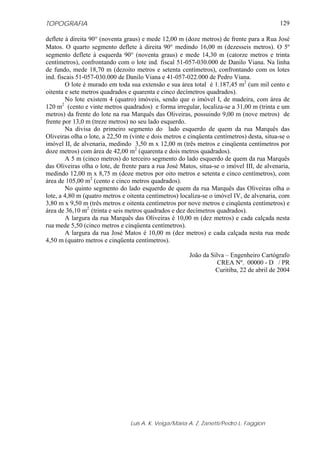
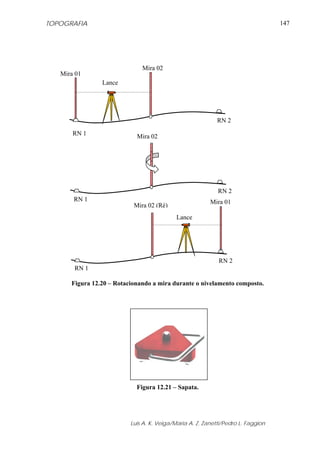
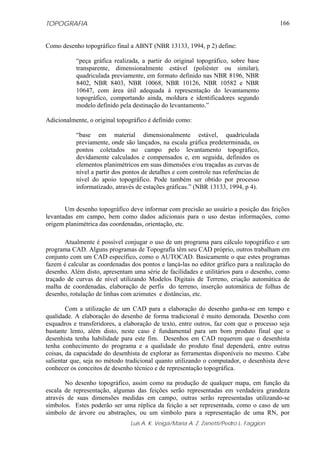
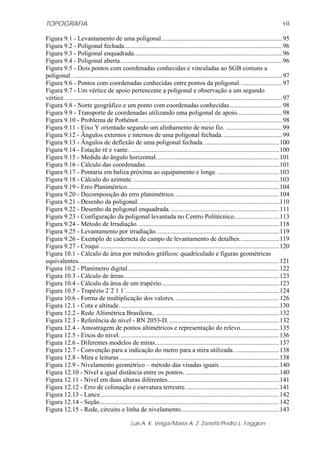
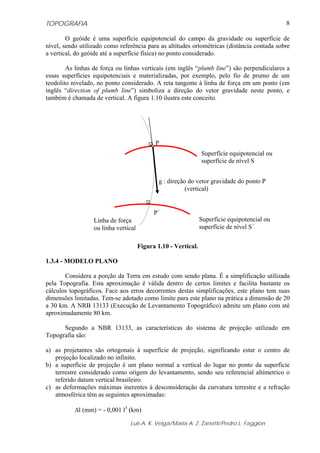
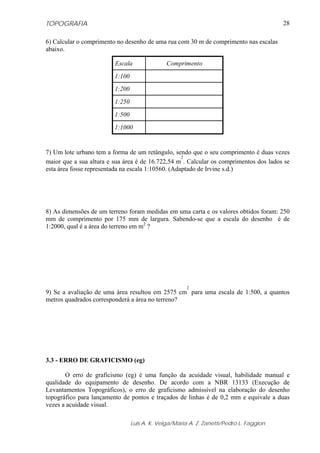
Na figura 5.14 apresenta-se uma variação de tempo Δt, a qual percebe-se que é igual
à variação de fase Δϕ, para uma onda de período T. Esta variação também pode ser expressa
pela seguinte equação:
Δϕ = Δt ω (5.20)
ou
Δt = Δϕ / 2πf (5.21)
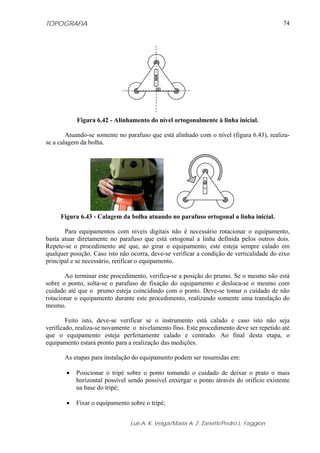
Figura 5.14 - Dois sinais senoidais com a mesma amplitude e fases diferentes.
(Fonte: Adaptado de RÜEGER, 1996).
Na figura 5.14, admitindo i = 1, a equação (5.18) pode ser reescrita da seguinte
forma:
t2 - t1 = (ϕ2 - ϕ1) / 2πf (5.22)
Substituindo as equações (5.11) e (5.22) na equação (5.10), obtém-se a seguinte
equação para a distância:](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-54-320.jpg)



![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
48
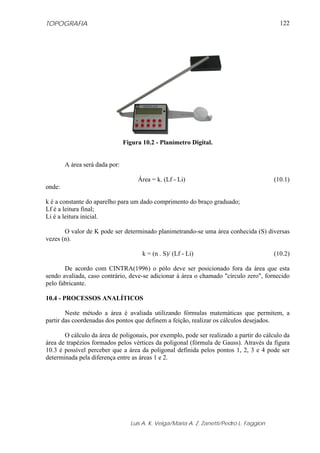
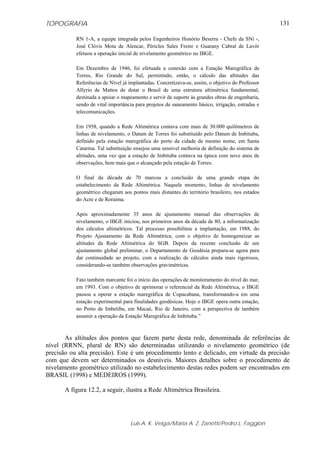
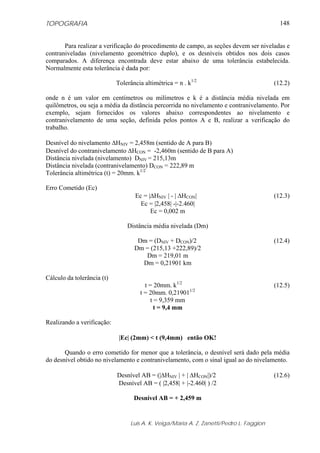
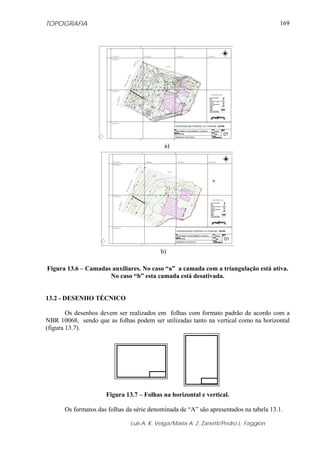
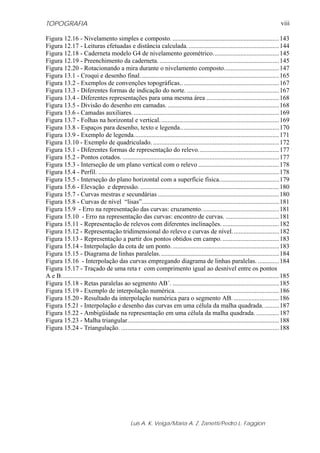
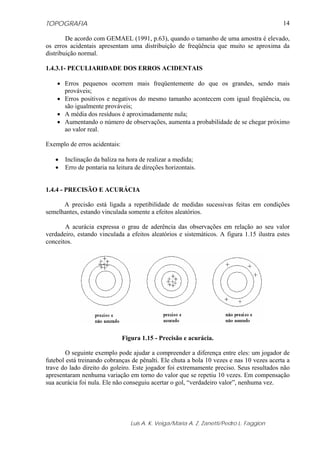
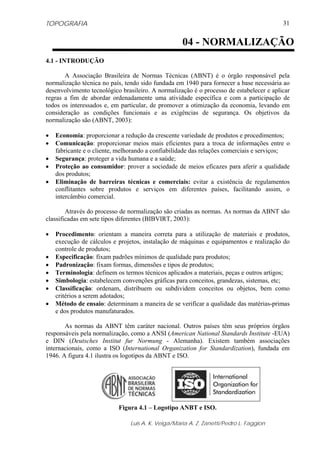
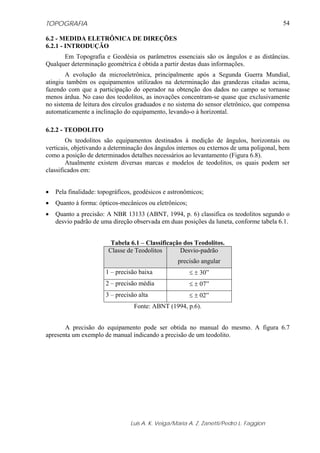
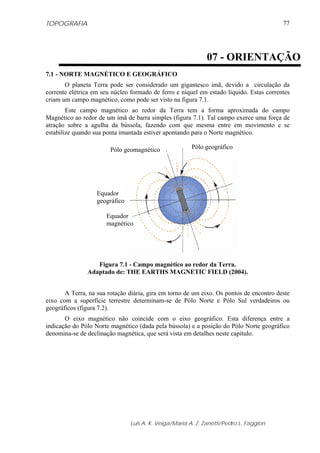
Figura 5.18 – Ábaco utilizado para a obtenção da correção ambiental.
5.6 - EXEMPLOS DA OBTENÇÃO DA CORREÇÃO UTILIZANDO A
FORMULAÇÃO APRESENTADA
A partir das informações dadas a seguir, calcular o valor da correção meteorológica
a ser aplicada na distância medida.
Temperatura (t) = 25,0 0
C
Pressão Atmosférica (p) = 920,0 mbar
Umidade Relativa (h) =56 %
a) Obtenção da Correção Utilizando Formulário
X = ((7,5 • 25,0) / (237,3 + 25,0)) + 0,7857
X = 1,5005
( ) ( ) ⎥
⎦
⎤
⎢
⎣
⎡
⋅
⋅+
⋅⋅
−
⋅+
⋅
−=Δ
−
x
t
h
t
P
D 10
1
10126,4
1
29065,0
8,281
4
1
αα
ΔD1 = 281,8 – [a – b]
onde:
a = ( 0,29065 x 920,0 / ( 1 + 0,00421 x 25,0 ) )
b = ( ( 4,126 x 10 –4
x 56 ) / ( 1 + 0,00421 x 25,0 ) ) x 10 1,5005
]
Fonte: WILD TC2002, 1994. p 113](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-58-320.jpg)
![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
49
ΔD1 = 281,8 – [ 244,9821 – 0,67022 ]
ΔD1 = 37,48 ppm (parte por milhão)
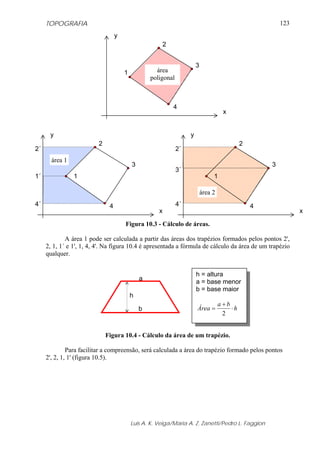
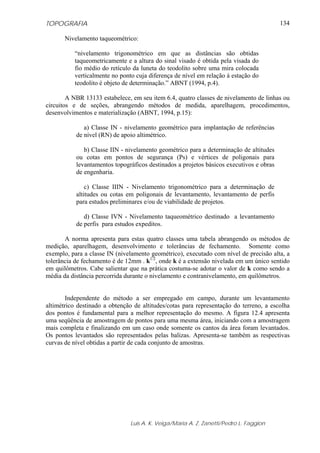
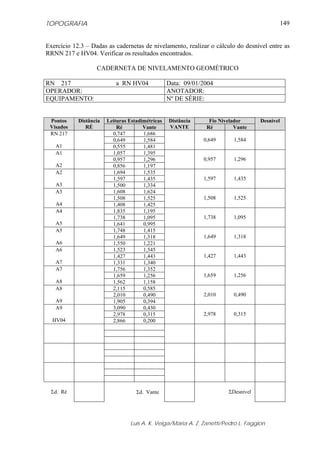
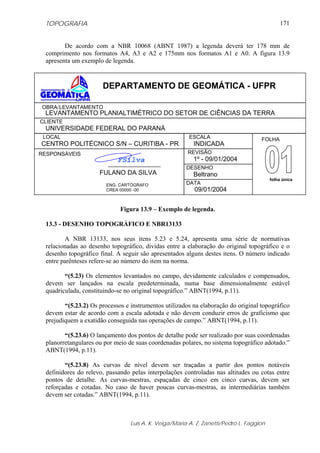
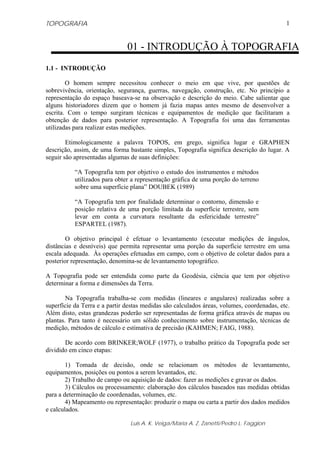
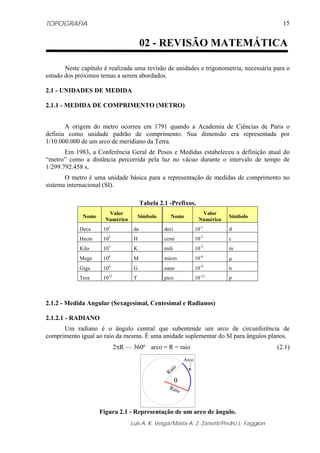
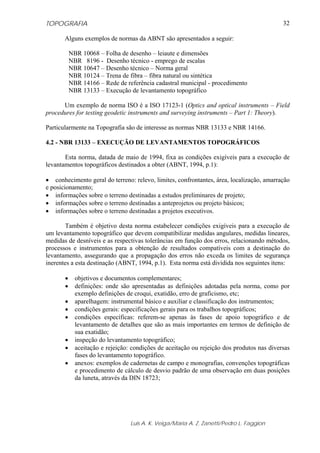
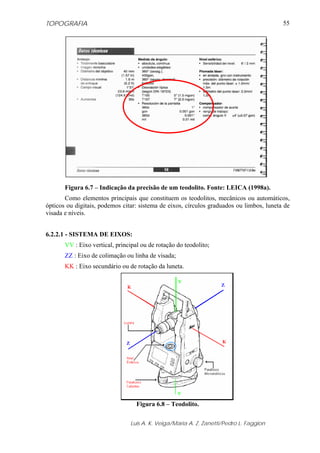
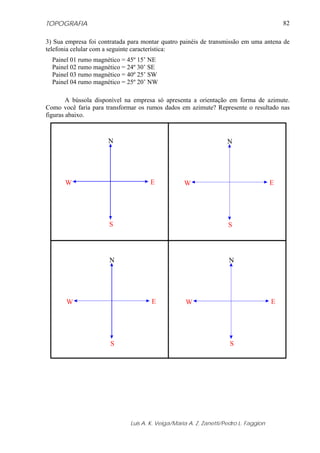
b) Obtenção da correção utilizando o Ábaco
Utilizando as mesmas informações apresentadas anteriormente calcular o valor da
correção utilizando o ábaco (figura 5.19).
Temperatura (t) = 25,0 0
C
Pressão Atmosférica (p) = 920,0 mbar
Fonte: WILD TC 2002, 1994
Figura 5.19 – Ábaco utilizado para a obtenção da correção ambiental.
ΔD1 = 37,0 ppm
Aplicando valores para as correções encontradas para uma distância de 800 m chega-se às
seguintes distâncias corrigidas:
Para o valor obtido através da equação
1000, 00 m 37,48 mm
800, 00 m x mm
x = (800,00 x 37,48) / 1000,00
x = 29,98 mm, arredondando para a primeira casa decimal 30,0 mm
Correção 37,0 ppm
25 0
C
920 mbar
15 0
C](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-59-320.jpg)






















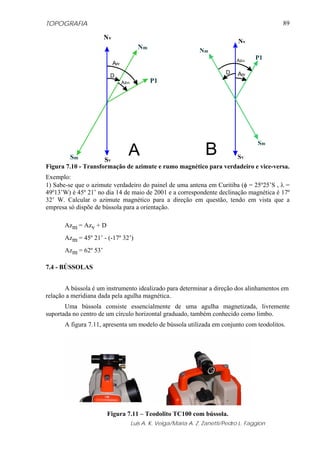
![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
83
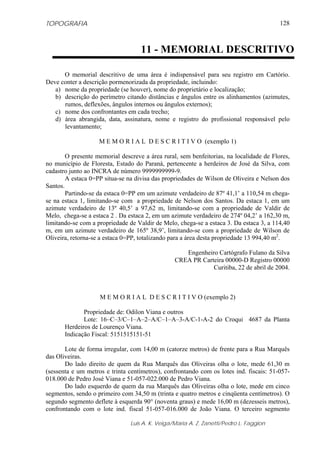
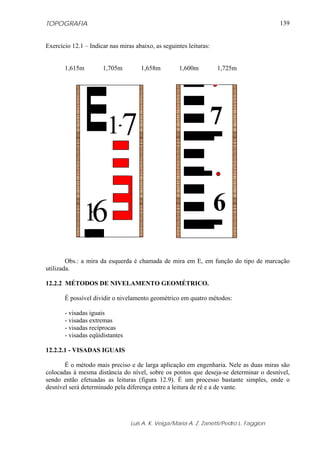
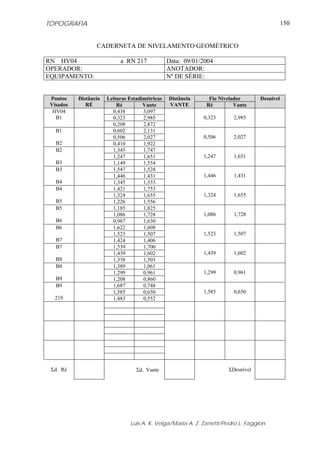
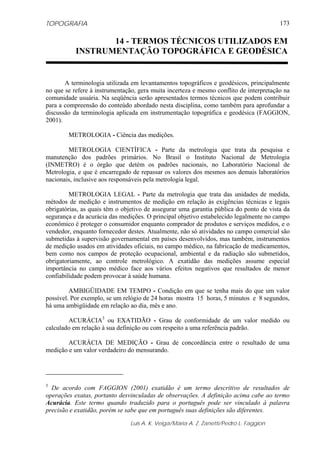
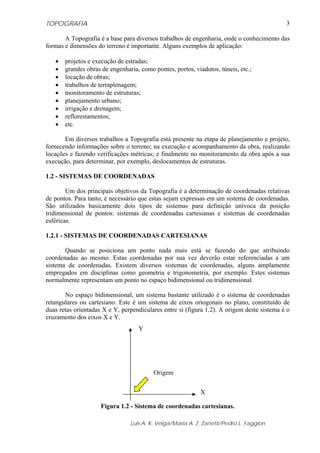
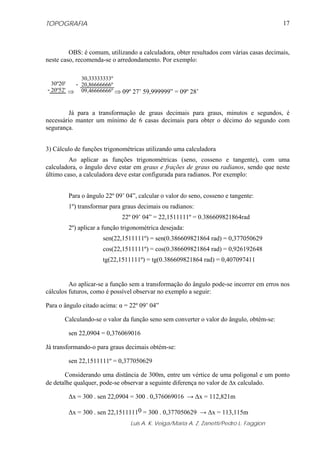
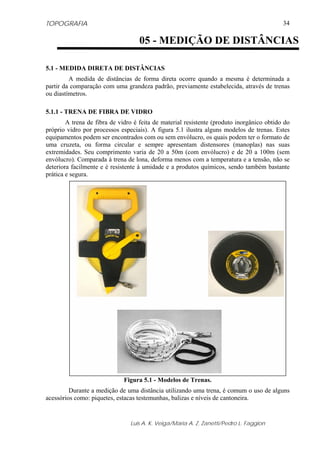
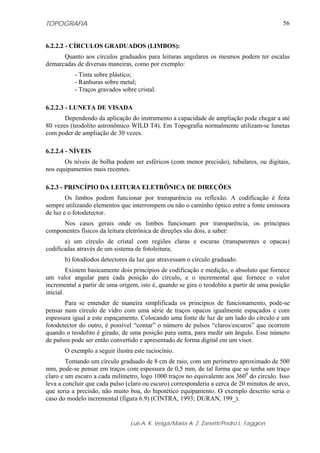
7.3 - DECLINAÇÃO MAGNÉTICA
Declinação magnética é o ângulo formado entre o meridiano verdadeiro e o meridiano
magnético; ou também pode ser identificado como desvio entre o azimute ou rumo
verdadeiros e os correspondentes magnéticos (figura 7.5).
Varia com o tempo e com a posição geográfica, podendo ser ocidental (δW), negativa
quando o Pólo magnético estiver a Oeste (W) do geográfico e oriental (δE) em caso contrário.
Atualmente, em nosso país a declinação é negativa, logo ocidental.
Figura 7.5 - Representação da Declinação Magnética.
A representação da declinação magnética em cartas é feita através de curvas de igual
valor de variação anual em graus (curvas isogônicas) e curvas de igual variação anual em
minutos (curvas isopóricas). A interpolação das curvas do grau e posteriormente no minuto,
para uma dada posição na superfície física da Terra, nos permite a determinação da declinação
magnética com precisão na ordem do minuto.
No Brasil o órgão responsável pela elaboração das cartas de declinação é o
Observatório Nacional e a periodicidade de publicações da mesma é de 10 anos.
7.3.1 - CÁLCULO DA DECLINAÇÃO MAGNÉTICA
Para que se possa calcular a declinação magnética para um determinado ponto da
superfície física da terra são necessários alguns dados preliminares, tais como:
- Latitude geográfica (φ);
- Longitude geográfica (λ);
- Carta de declinação magnética da região em questão.
De posse destes dados, listados a cima e utilizando a equação 7.9, é possível obter a
declinação magnética para a região em questão.
D = Cig + [(A + fa) . Cip] (7.9)
Onde:
D = Valor da declinação magnética;
Cig = Valor interpolado da curva isogônica;](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-93-320.jpg)
![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
84
Cip = Valor interpolado da curva isopórica;
A = Diferença entre o ano de confecção do mapa de declinação magnética e o ano
da observação (Ex. observação em 2003. O valor de “A” será dado por A = 2003-2000 =3);
fa = Fração de ano, ver tabela 7.1.
Tabela 7.1 - Valor da fração do ano.
Período Fração do Ano
de 01 Janeiro a 19 de Janeiro 0,0
de 20 Janeiro a 24 de Fevereiro 0,1
de 25 Fevereiro a 01 Abril 0,2
de 02 Abril a 07 de Maio 0,3
de 08 Maio a 13 Junho 0,4
de 14 Junho a 19 de Julho 0,5
de 20 Julho a 25 de Agosto 0,6
de 26 Agosto a 30 de Setembro 0,7
de 01 Outubro a 06 de Novembro 0.8
de 07 Novembro a 12 de Dezembro 0.9
de 13 Dezembro a 31 de Dezembro 1,0
Na seqüência será apresentado um exemplo, onde se faz a discussão do assunto com
mais propriedade.
7.3.2 - EXEMPLOS
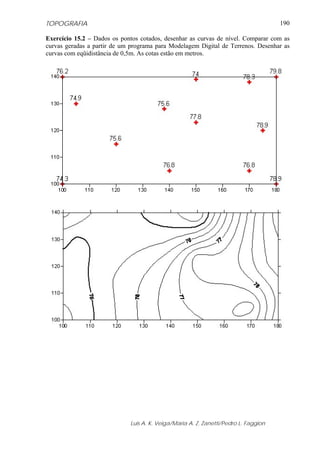
1) Baseado nas informações contidas na figura 7.6 calcular a declinação magnética para
Curitiba (φ = 25° 25' 48'' S, λ = 49° 16' 15'' W), no dia 27 de Outubro de 2003.
D = Cig + [(A + fa) . Cip]
a) Cálculo de Cig
a.1) Interpolação das Curvas Isogônicas
Com a régua ortogonal a uma das curvas, mede-se a distância linear entre as curvas
que compreendem a cidade que se deseja calcular a declinação.
Neste caso a distância linear entre as curvas -17º e -18º é 2,4 cm.
Com a régua ortogonal à curva -17º, mede-se a distância linear entre a curva e a
localidade que se deseja determinar a declinação magnética.
Neste caso a distância linear entre a curva -17º e Curitiba é 0,5 cm.
Logo:
1º → 2,4 cm
xº → 0,8 cm](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-94-320.jpg)
![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
85
xº = 0,3333º
Cig = -17º - Xº
Cig = -17,33333º
b) Cálculo de Cip
Mesmo processo utilizado para Cig. O valor obtido é de - 7,054’.
D = -17,3333º + [(3 + 0,8)] . (-7,054’)
D = -17º46’48,19”
02) Idem ao anterior para Foz do Iguaçu (φ = 25° 32' 45'' S, λ = 54° 35' 07'' W), no dia 14 de
maio de 2001.
D = Cig + [(A + fa).Cip]
a) Cálculo de Cig
a1) Interpolação das Curvas Isogônicas
Com a régua ortogonal a uma das curvas isogônicas, medir a distância linear entre as
curvas que compreendem a cidade que se deseja calcular a declinação.
Neste caso a distância linear entre as curvas -13º e -14º é 2,0 cm.
Com a régua ortogonal à curva -13º, medir a distância linear entre a curva e a
localidade que se deseja determinar a declinação magnética.
Neste caso a distância entre a curva -13º e Foz do Iguaçu é 0,8 cm.
Logo:
1º → 2,0 cm
xº → 0,75 cm
xº = 0,375º
Cig = -13º - xº ; Cig = - 13,375º
b) Cálculo de Cip
Mesmo processo utilizado para Cig. O valor obtido é de - 8’,3571.
D = -13,375º + [(1 + 0,4)] . (-8,3571’ )
D = -13,375º - 11º 42’ ; D = -13º 34’ 12”](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-95-320.jpg)






















![TOPOGRAFIA
Luis A. K. Veiga/Maria A. Z. Zanetti/Pedro L. Faggion
114
274º57'33"B-9A = .
A distância horizontal entre os pontos A e OPP pode ser obtida pela expressão:
( ) ( )[ ]Y-YX-Xd 1/22
PP0
2
PP0PP0-A === += AA .
m42,232d PP0-A ==
Da mesma forma:
m50,296d9 =−B .
2) Cálculo dos Azimutes das direções
126º15'33"180º-aA pp0PP0-A10 =+= ==−
c
ppA , analogamente:
223º40'50"21 =−
c
A
109º12'51"32 =−
c
A
164º05'53"43 =−
c
A
175º25'08"54 =−
c
A
223º53'36"65 =−
c
A
233º26'41"76 =−
c
A
237º25'09"87 =−
c
A
198º59'39"98 =−
c
A
274º57'52"9 =−
c
BA
3) Cálculo do erro angular total e verificação de sua magnitude
B
c
BA AAe −−= 99 -
0º00'19"274º57'33"-74º57'52"2 ==Ae
Verifica-se se o erro angular total é menor ou igual em módulo a tolerância angular
prescrita para a poligonal. Para este exercício as tolerâncias serão:
Angular: 1’ n , onde n é o número de ângulos medidos na poligonal.
Linear: 1/2000.
Tolerância angular = 1’ 10 = 3,16’
portanto,
Ae ≤ Tolerância angular](https://image.slidesharecdn.com/apostilatopografia-150421200501-conversion-gate02/85/Apostila-topografia-124-320.jpg)