Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
1
CURSO DE VERÃO DE
MATEMÁTICA BÁSICA
2011.1
Programa de Pós-Graduação em Física
Pró-Reitoria de Ensino de Graduação/UFSC
Pró-Reitoria de Ensino de Pós-Graduação/UFSC
Projeto REUNI – Reestruturação e Expansão das Universidades Federais
2.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
2
CURSO DE VERÃO DE
MATEMÁTICA BÁSICA
2011.1
Apostila Elaborada por:
Adriana Marin (Doutoranda em Física)
Juliana Eccher (Doutoranda em Física)
Robson Lourenço Cavalcante (Doutorando em Física)
Rodrigo Maia Cardozo (Mestrando em Física)
Thiago de Cacio Luchese (Doutorando em Física)
Coordenação:
Alessandra Pereira (Doutoranda em Física)
Robson Lourenço Cavalcante (Doutorando em Física)
Supervisão:
Prof. Dr. Marcelo Henrique Romano Tragtenberg
(Departamento e Programa de Pós-Graduação em Física da UFSC)
Diagramação:
Alessandra Pereira (Doutoranda em Física)
Thiago de Cacio Luchese (Doutorando em Física)
Ministrantes do Curso e Cronograma:
28/02/2011 – Frações, Potenciação, Radiciação, Equação do 1º Grau (Tharnier Puel de
Oliveira)
01/03/2011 – Equações, Polinômios, Sistemas de Equações (Gabriel Neves Ferrari)
02/03/2011 – Funções (Adriana Marin)
03/03/2011 – Trigonometria (Marcos Correia )
04/03/2011 – Vetores (Juliana Eccher)
Programa de Pós-Graduação em Física
Pró-Reitoria de Ensino de Graduação/UFSC
Pró-Reitoria de Ensino de Pós-Graduação/UFSC
Projeto REUNI – Reestruturação e Expansão das Universidades Federais
3.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
3
Módulo 1: Frações,
Potenciação e Radiciação
1 Frações
Número fracionário é o número
resultante da razão de dois números
inteiros.
Quando dividimos ou multiplicamos o
numerador e o denominador de uma
fração por um mesmo número, diferente
de zero, sempre obtemos uma fração
equivalente à fração dada.
Ex.:
15
5
5
5
.
3
1
e
3
1
5
5
15
5
Logo
15
5
e
3
1
são frações equivalentes.
2 Transformação de Número
Fracionário em Número Decimal
Basta dividir o numerador pelo
denominador.
Exemplos:
a) 2
,
0
5
:
1
5
1
b) 67
,
6
3
20
2 Transformação de Número Decimal
em Número Fracionário
Basta dividir por 10, 100, 1000... O
número de zeros colocados no
denominador é igual ao número de
casas após a vírgula.
Exemplos:
a)
5
2
2
10
2
4
10
4
4
,
0
b)
10
23
3
,
2
c)
250
153
500
306
2
1000
2
612
1000
612
612
,
0
d)
10
143
3
,
14
e) %
15
100
15
15
,
0
3 Adição e Subtração
Podemos somar ou subtrair frações que
possuam o mesmo denominador.
Procedendo da seguinte forma:
somando (ou subtraindo) o numerador
da primeira fração com o numerador da
segunda fração e assim, sucessivamente,
(se houver mais frações). O
denominador será o mesmo!
3
1
15
5
São frações
equivalentes, pois
representam a
mesma parte de
um inteiro.
4.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
4
Exemplos:
(a)
5
4
5
3
5
1
(b)
7
2
7
3
7
5
Quando as frações não possuem o
mesmo denominador (denominador
diferente) devemos reduzí-las ao menor
denominador comum (ou Mínimo
Múltiplo Comum-MMC) e, em seguida
dividir pelo denominador e o resultado
multiplicar pelo numerador. Este
procedimento se repete para cada fração
existente. Por último, podemos somar
ou subtrair as frações equivalentes às
frações dadas.
Exemplo:
15 é o menor denominador comum ou o
mínimo múltiplo comum de 3 e 5.
15
17
15
12
15
5
5
4
3
1
4 Multiplicação
Basta multiplicar numerador por
numerador e denominador por
denominador.
Exemplos:
a)
12
5
4
3
5
1
4
5
3
1
b)
3
10
3
1
2
5
3
2
1
5
5 Divisão
Mantenha a primeira fração e inverta a
segunda passando a divisão para
multiplicação.
Exemplos:
a)
35
1
7
5
1
1
7
1
5
1
1
7
:
5
1
ou
7
:
5
1
b)
15
2
3
5
2
1
3
2
5
1
2
3
:
5
1
c)
12
1
12
2
2
2
24
2
1
3
8
2
3
1
8
3
2
:
1
8
3
2
:
8
ou
Frações equivalentes às
frações dadas, com o
mesmo denominador.
Para os exemplos
a e c Lembre-se:
1
8
8
1
7
7
5.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
5
6 Potenciação
A potenciação indica multiplicações de
fatores iguais. Por exemplo, o produto
3
.
3
.
3
.
3 pode ser indicado na forma 4
3 .
Assim, o símbolo n
a , sendo a um
número inteiro e n um número natural
maior que 1, significa o produto de n
fatores iguais a a:
fatores
n
n
a
a
a
a
a .
...
.
.
.
onde:
- a é a base;
- n é o expoente;
- o resultado é a potência.
Por definição temos que:
a
a
e
a
1
0
1
Exemplos:
2
1
8
4
2
.
2
.
2
2
.
2
2
2
) 3
2
a
16
9
4
3
.
4
3
4
3
)
2
b
8
2
)
3
c
Cuidado com os sinais!!!
o Número negativo elevado a
expoente par fica positivo.
Exemplos:
16
2
.
2
.
2
.
2
2
)
4
a
9
3
3
3
)
2
b
o Número negativo elevado a
expoente ímpar permanece
negativo.
Exemplo:
2
2
2
2
3
=
2
4 8
Principais propriedades:
a)
n
m
n
m
a
a
a
Exemplos:
i) 2
2
2
2
2
x
x
ii) 11
7
4
7
4
a
a
a
a
b)
n
m
n
m
a
a
a
Exemplos:
i) x
x
4
4
3
3
3
ii) 1
5
4
5
4
a
a
a
a
6.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
6
c) n
m
n
m
a
a
Exemplos:
i) 6
3
3
3
3
2
3
4
4
4
.
4
4
ii) x
x
x
b
b
b
4
4
4
d) m
n
m n
a
a
Exemplos:
i) 2
1
2 1
x
x
x
ii) 3
7
3 7
x
x
iii) 3 8
3
8
x
x
e) 0
b
com
,
n
n
n
b
a
b
a
Exemplos:
i)
9
4
3
2
3
2
2
2
2
ii)
25
1
5
1
5
1
2
2
2
f) n
n
n
b
a
b
a
Exemplos:
i) 2
2
2
a
x
a
x
ii) 3
3
3
3
64
4
4 x
x
x
iii
4
2
1
4
4
4
4
3
3
3
x
x
x
2
2
4
2
4
4
81
3
3 x
x
x
g) n
n
a
a
1
Exemplos:
i) 3
3
3
3
3 1
1
1
a
a
a
a
ii)
4
9
2
3
2
3
3
2
2
2
2
2
iii)
4
1
4
1
4
1
1
iv)
1
3
2
1
3
2
3
2
x
x
x
O sinal negativo no
expoente indica que a
base da potência deve
ser invertida e
simultaneamente
devemos eliminar o sinal
negativo do expoente.
7.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
7
7 Radiciação
A radiciação é a operação inversa da
potenciação. De modo geral podemos
escrever:
1
n
n
e
a
b
b
a n
n
a) 4
2
2
4 2
pois
b) 8
2
2
8 3
3
pois
Na raiz n
a , temos:
- O número n é chamado
índice;
- O número a é chamado
radicando.
Principais propriedades:
a) n
p
n p
a
a
Exemplos:
i) 3
1
3
2
2
ii) 2
3
3
4
4
iii) 5
2
5 2
6
6
b) a
a
a
a 1
n
n
n n
Para n ímpar
Exemplo:
i) 2
2
2
2
1
3
3
3 3
a
a
n n
Para n par
Exemplo:
i) 2
2
2
2
c) n
n
n
b
a
b
a
Exemplo:
i)
2
3
6
3
3
3 6
3 3
3 6
3
b
a
b
a
b
a
b
a
d) n
n
n
b
a
b
a
Exemplo:
i)
5
3
2
5
3
2
5
2
6
5
6
5
6
b
a
ou
b
a
b
a
b
a
b
a
e) n
m
m
n
m
n
m
n
m
n
b
b
b
b
b
1
1
1
1
Exemplo:
i) 2
3
1
3
2
1
3
2
1
3
2
1
3
5
5
5
5
5
f) n
m
n m
a
a
Exemplo:
i) 6
2
3
3 2
3
3
3
8.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
8
Exercícios Propostos:
1. Transforme os números
decimais abaixo em frações:
a) –1,3
b) 0,580
c) 0,1000
d) 7%
2. Calcule e dê a resposta na forma
fracionária:
a)
5
3
2
1
b)
5
1
3
7
c)
5
3
4
1
3
2
d)
1
5
2
e)
4
3
6
5
f)
8
3
12
1
g)
4
,
0
25
,
1
7
,
0
2
h)
4
7
7
,
0
2
i)
2
1
5
4
4
3
2
,
1
3. Calcule os produtos e dê a
resposta na forma fracionária:
a)
15
16
26
5
8
13
b)
39
1
)
6
,
0
(
8
13
.
2
c)
5
,
0
20
9
8
,
0
4. Calcule as divisões:
a)
4
9
3
2
b)
4
4
3
c)
7
2
1
d)
2
1
2
5. Coloque os números abaixo na
ordem crescente:
a)
.
07
,
2
;
2000
,
0
;
125
,
0
;
4
,
2
;
33
,
1
;
2
,
1
;
55
,
0
b) .
7
,
100
450
;
4
;
7
15
;
5
3
;
3
2
;
2
1
c) .
2
;
3
10
;
5
7
;
1
,
2
;
2
,
7
;
4
,
0
9.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
9
6. Calcule as potências:
a) 50
b) (-8)0
c)
4
2
3
d)
4
2
3
e)
3
2
3
f)
2
5
3
7. Qual é a forma mais simples de
escrever:
a) (a . b)3
. b . (b . c)2
b) 7
4
5
2
3
.
.
.
.
y
x
x
y
y
x
8. Calcule o valor da expressão:
2
1
2
4
1
2
1
3
2
A
9. Simplificando a expressão
2
3
3
1
.
3
4
1
2
1
.
3
2
2
, obtemos qual número?
10. Efetue:
a)
3
8
a
a
b)
3
2
2
3
2
2
b
c
a
c
ab
c)
3
2
2
2
2
3
3
2
2
3
3
b
a
xy
b
a
y
x
d)
4
2
3
b
a
e)
2
4
3
5
2
x
ab
f)
4
2
3
1
a
11. Sabendo que
2
5
4
2
a ,
determine o valor de a.
12. Simplifique as expressões:
a) 1
n
n
2
n
3
3
3
3
E
b)
1
n
1
n
n
4
2
4
E
c) 1
n
2
n
5
100
25
G
10.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
10
13. Dê o valor das expressões e
apresente o resultado na forma
fracionária:
a)
100
1
b)
16
1
c)
9
4
d)
01
,
0
e)
81
,
0
f)
25
,
2
14. Calcule a raiz indicada:
a)
9 3
a
b) 3
48
c) 7
t
d)
4 12
t
15. Escreva na forma de potência
com expoente fracionário:
a)
7
b)
4 3
2
c)
5 2
3
d)
6 5
a
e)
3 2
x
f)
3
1
16. Escreva na forma de radical:
a)
5
1
2
b)
3
2
4
c)
4
1
x
d)
2
1
8
e)
7
5
a
f)
4
1
3
b
a
g)
5
1
2
n
m
h)
4
3
m
17 De que forma escrevemos o
número
racional 0,001, usando expoente
inteiro negativo?
a) 1
10
b) 2
10
c) 3
10
11.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
11
d) 4
10
e) 10
1
18. Simplifique 10
8
10
6
10
12
:
19. Determine as somas algébricas:
a)
3
3
3
2
4
5
2
2
2
3
7
b)
3
5
5
5
2
5
6
5
12.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
12
Respostas Módulo 1
1) a) 10
13
b) 50
29
c)
10
1
d)
100
7
********************************
2) a) 10
11
b) 15
32
c) 60
61
d) 5
7
e) 12
1
********************************
3) a) 3
1
b) 20
1
c) 50
9
********************************
4)
a)
27
8 b)
16
3 c)
14
1
d) 4
********************************
5)
a) ).
4
,
2
(
);
07
,
2
(
);
33
,
1
(
);
55
,
0
(
);
2
,
0
(
);
125
,
0
(
);
2
,
1
(
b)
100
450
;
4
;
7
15
;
5
3
;
2
1
;
3
2
;
7
c) )
2
,
7
(
;
2
;
5
7
);
4
,
0
(
);
1
,
2
(
;
3
10
********************************
6) a) 1 b)1 c)
16
81
d) 16
81
e) 8
27
f) 25
9
********************************
7) a) a3
b6
c2
b) x8
********************************
8) 4
65
********************************
9) 7
6
********************************
10) a) a5
b) 3
8
4
c
b
a c) 4
4
3
4
b
a
x
d)
8
4
81
b
a
e)
6
2
8
4
25
b
a
x
f) 81a8
********************************
11) a = 36
25
********************************
12) a) 3n
b) 2n-3
c) 2.5n+4
********************************
13) a)
10
1 b)
4
1
c)
3
2 d) -
10
1 e)
10
9
f)
10
15
********************************
14)
3
) a
a 3
6
.
2
)
b t
t
c 3
) 3
)t
d
********************************
15) 2
1
7
)
a 4
3
2
)
b 5
2
3
)
c 6
5
) a
d
3
2
) x
e 2
1
3
)
f
********************************
16) 5
2
)
a 3
16
)
b 4
) x
c
8
1
)
d
7 5
) a
e 4 3
) b
a
f 5 2
) n
m
g
4 3
1
)
m
h
********************************
17) letra c
********************************
18) 10
2
13.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
13
19)
5
15
2
)
2
12
11
) 3
b
a
********************************
14.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
14
Módulo 2: Equações,
Tabelas, Gráficos e
Polinômios
Nesse capítulo serão abordados
conceitos referentes à construção de
tabelas e gráficos num plano cartesiano,
bem como o tratamento e resolução de
equações de 1º e 2º graus, equações
fracionárias, equações biquadradas e
equações irracionais, assuntos esses que
fazem parte da ementa do ensino
fundamental e ensino médio, sendo sua
compreensão de fundamental
importância para estudo de matemática
avançada.
2.1 Gráficos e Tabelas
Nessa seção faremos uma discussão
sobre a construção de tabelas e gráficos
num plano cartesiano ortogonal.
2.1.1 Sistema cartesiano Ortogonal
É um sistema constituído por dois eixos,
x (eixo das abscissas) e y (eixos das
ordenadas), perpendiculares entre si.
Esse sistema é utilizado para localizar
um ponto no plano sendo que a origem
do sistema está localizada no ponto 0.
2.1.2 Pares Ordenados
É um conjunto com dois elementos x e
y, sendo x o primeiro elemento e y o
segundo elemento, representado por
(x,y). Utilizamos esses pares para
localizar um ponto num plano.
Observação:
x
y
y
x ,
, , a menos
que y
x .
Exemplo 1:
(3,2); (5,10); (9;0)
2.1.3 Localização de um Ponto
Para localizar um ponto num plano
cartesiano, utilizamos a seguinte
sequência prática:
O 1º número do par ordenado deve
ser localizado no eixo das
abscissas.
O 2º número do par ordenado deve
ser localizado no eixo das
ordenadas.
No encontro das perpendiculares
aos eixos x e y, por esses pontos,
determinamos o ponto procurado.
15.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
15
Exemplo 2:
Encontre o ponto localizado em (4,3)
2.1.4 Gráficos de uma equação de 1o
grau com duas variáveis
Uma equação do 1º grau com duas
variáveis possui infinitas soluções, onde
cada uma dessas soluções pode ser
representada por um par ordenado (x, y).
A partir de dois pares ordenados de uma
equação podemos encontrar dois pontos
no plano cartesiano, e traçando uma reta
que liga os dois pontos podemos
determinar o conjunto de soluções dessa
equação. Essa equação é chamada de
equação da reta e tem a seguinte forma:
y = ax + b
onde a representa a inclinação θ da reta
(coeficiente angular) e b é o ponto em
que a reta intercepta o eixo y das
ordenadas quando X = 0 (coeficiente
linear).
Para o cálculo do coeficiente angular
utilizamos a seguinte expressão:
a = tgθ =( y2 – y1)/(x2 – x1)
sendo P1(x1,y1) e P2(x2,y2) os pares
ordenados.
Exemplo 3:
Construir o gráfico da equação x + y =
3 e em seguida achar os coeficientes
angular e linear da reta.
Dois dos pares ordenados que
satisfaçam essa equação são P1(0,3) e
P2(3,0). Ligando esses pontos através
de uma reta no plano cartesiano
ficamos com:
x y
0 3
3 0
x2
x1
y1 θ
Y2
16.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
16
Para x = 0 temos que y = 3, portanto,
nosso coeficiente linear b é igual a 3.
b = 3
Já o coeficiente angular a fica
a = 0 – 3/3 – 0
a = -1
E a partir daí podemos determinar
outros pares referentes a essa equação,
construindo uma tabela de infinitos
pares ordenados e determinando todas
as suas possíveis soluções.
2.2 Equações
Nessa seção traremos o conceito de
equação com a posterior discussão de
algumas de suas propriedades e
características, assim como as diferentes
maneiras de resolvê-las.
Definição: Equação é uma igualdade
que só é verdadeira para determinados
valores atribuídos às variáveis (que se
denominam incógnitas, quantidade
desconhecida de uma equação ou de um
problema).
2.2.1 Equação de 1º grau
É toda equação, com variável x, na
forma ax + b = 0, sendo a e b números
reais conhecidos, com a ≠ 0. Essas
equações possuem apenas uma
incógnita x, sendo seu maior expoente
igual a um.
Exemplos 4:
1) x + 3 = 0 é verdade para o valor de
x = - 3, ou seja, - 3 + 3 = 0.
2) x – 5 = 5 é verdade para o valor de
x = 10, ou seja, 10 – 5 = 5.
3) 3x = 9 é verdade para o valor de x =
3, ou seja, 3.3 = 9.
4) x/2 = 3 é verdade para o valor de
x = 6, ou seja, 6/2 = 3.
Observação: Os valores atribuídos às
incógnitas que tornam verdadeiras as
igualdades denominam-se raízes da
equação ou solução.
x y
0 3
1 2
2 1
3 0
17.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
17
Soluções de uma equação:
a) 2x – 3 = 4x + 7, x = -5 (única
solução)
b) 2x – 3 = 2x + 7, 0x = 10 (não
possui solução)
c) 2x + 3 = 2x + 3, 0x = 0 (infinitas
soluções)
2.2.2 Equação de 2º grau
MOVIMENTO RETILÍNEO
UNIFORMEMENTE VARIADO
MRUV
É toda equação, com variável x, na
forma ax2
+ bx + c = 0, sendo a, b e c
números reais conhecidos, com a ≠ 0.
Essas equações possuem apenas uma
incógnita, sendo seu maior expoente
igual a dois.
Exemplos 5:
1) 2x2
– 5x + 2 = 0
2) 4x2
– 9 = 0
3) 4x2
– 3x = 0
4) 5x2
= 0
Observação: quando b e/ou c são nulos
temos uma equação incompleta, para b
e c não nulos temos aquilo que
chamamos de equação completa.
Resolução de equações de 2º grau
(equações incompletas):
1º caso: b = 0 e c = 0
Forma geral: ax2
= 0
Exemplo: 5x2
= 0, x² = 0, x = 0
2º caso: b = 0 e c ≠ 0
Forma geral: ax2
+ c = 0
a
c
x
Exemplo: 2x2
– 8 = 0, x2
= 4,
x = 4
, x’ = 2 e x’’ = -2
3º caso: b ≠ 0 e c = 0
Forma geral: ax2
+ bx = 0
x(ax +b)=0, x=0 ou x = -b/a
Exemplo: x2
– 9x = 0, x2
= 9x,
x = 9 ou x=0
Resolução de equações de 2º grau
(equações completas):
Caso geral: b e c quaisquer
Forma geral: ax2
+ bx + c = 0
Retas concorrentes
Retas paralelas
Retas coincidentes
18.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
18
Essas equações, bem como as equações
incompletas podem ser resolvidas pela
fórmula abaixo desenvolvida por um
matemático indiano chamado Bháskara.
a
ac
b
b
x
2
4
2
(Fórmula de Bháskara)
onde,
Δ = b2
– 4ac, é o discriminante da
equação,
então
a
b
x
2
Sendo que,
Se 0
, a equação não tem
raízes reais, mas, sim, temos duas raízes
complexas (isso será discutido depois)
Se 0
, a equação possui duas
raízes reais iguais;
Se 0
, a equação possui duas
raízes reais e distintas.
Uma das maneiras de encontrar as
raízes é uma técnica conhecida como
completar o quadrado, que consiste em
rearranjar o polinômio na forma:
0
2
m
n
x
onde n e m são duas constantes. Por
exemplo:
12
3
12
)
9
6
(
3
6
2
2
2
x
x
x
x
x
De onde descobrimos que as raízes do
polinômio são:
3
)
12
( 2
1
1
x e 3
)
12
( 2
1
2
x
Nem sempre é prático utilizar o método
de completar o quadrado. Note que no
caso acima, o coeficiente do termo de
segunda ordem era igual a um, o que
facilitou muito as contas.
19.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
19
Dedução da Fórmula de Bháskara
A partir da equação 𝑎𝑥2
+ 𝑏𝑥 + 𝑐 = 0,
em que a, b, c e 𝑎 ≠ 0,
desenvolveremos passo a passo a
dedução da fórmula de Bháskara (ou
fórmula resolutiva).
1º passo: multiplicaremos ambos os
lados por 4a
4𝑎 . 𝑎𝑥2
+ 𝑏𝑥 + 𝑐 = 0. 4𝑎
4𝑎2
𝑥2
+ 4𝑎𝑏𝑥 + 4𝑎𝑐 = 0
2º passo: passar 4ac par o 2º lado.
4𝑎2
𝑥2
+ 4𝑎𝑏𝑥 = −4𝑎𝑐
3º passo: adicionar b2
aos dois lados
4𝑎2
𝑥2
+ 4𝑎𝑏𝑥 + 𝑏2
= 𝑏2
− 4𝑎𝑐
4º passo: fatorar o 1º lado
2𝑎𝑥 + 𝑏 2
= 𝑏2
− 4𝑎𝑐
5º passo: extrair a raiz quadrada dos
lados
2𝑎𝑥 + 𝑏 2 = ± 𝑏2 − 4𝑎𝑐
2𝑎𝑥 + 𝑏 = ± 𝑏2 − 4𝑎𝑐
6º passo: passar b para o 2º lado
2𝑎𝑥 = ± 𝑏2 − 4𝑎𝑐 − 𝑏
7º passo: dividir os dois lados por 2a
𝑎 ≠ 0
2𝑎𝑥
2𝑎
=
−𝑏 ± 𝑏2 − 4𝑎𝑐
2𝑎
Assim, encontramos a fórmula
resolutiva da equação do 2º grau:
𝑥 =
−𝑏 ± 𝑏2 − 4𝑎𝑐
2𝑎
Podemos representar as duas raízes
reais por x' e x", assim:
𝑥′ =
−𝑏 + 𝑏2 − 4𝑎𝑐
2𝑎
𝑥′′ =
−𝑏 − 𝑏2 − 4𝑎𝑐
2𝑎
Equações deste tipo têm muita
relevância em problemas físicos. Por
exemplo, as equações de movimento de
corpos em movimento retilíneo
uniforme e em movimento retilíneo
uniformemente variado são,
respectivamente, lineares e quadráticas.
20.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
20
RAÍZES COMPLEXAS
MOTIVACAO:
O estudo das raízes complexas podem
ser aplicadas em:
a ) SISTEMAS OSCILANTES:
CIRCUITOS, SISTEMA MASSA MOLA.
b ) RELATIVIDADE,
c) MECÂNICA QUÂNTICA
As raízes com as quais trabalhamos até
agora eram raízes reais. Todos os
números reais podem ser denotados
como pontos em uma reta, com um
ponto zero e uma direção positiva
definidas. As operações de adição,
subtração, multiplicação e potenciação a
números inteiros positivos podem ser
definidas sobre o conjunto dos números
reais. Por exemplo, se multiplicamos
quaisquer números reais, o resultado é
um número real. Há situações em que
isso não é possível, porém. Se
dividirmos um número real por zero,
não obtemos um número real.
Expressões como 5/0 e 0/0 são
indefinições. Outra exceção aparece
quando elevamos um número negativo a
certas potências fracionárias, como 1/2.
Tomar a raiz quadrada de -1, por
exemplo, não fornece como resultado
um número real. Neste caso, contudo, a
operação pode ser definida. A raiz
positiva de -1 é definida como a
unidade imaginária, denotada por i. A
multiplicação de um número real por i
resulta em um número imaginário. A
soma de um número real e um número
imaginário é um número complexo, e a
forma geral de um número complexo z
é:
iy
x
z
Onde x e y são números reais. Números
complexos podem ser representados
como pontos em um plano coordenado
em que um eixo é a reta dos números
reais e o outro é a reta dos números
imaginários.
2.2.3 Equações Fracionárias
Uma equação é dita fracionária quando
apresenta variável no denominador.
Exemplos 6:
1)
x
x
4
1
5
2
, para x ≠ 0
2) 2
3
3
1
2
x
x
,
para x ≠ -1 e x ≠ -3
3) 0
3
5
1
2
3
2
x
x
,
para x ≠ 0 e x ≠ 1
21.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
21
Observação: as restrições para
determinados valores de x devem-se ao
fato de o denominador desses termos
nunca poder ser zero.
Resolução: Para resolver esse tipo de
equação tomamos o mínimo múltiplo
comum delas e eliminamos as variáveis
dos denominadores.
4) 0
3
5
1
2
3
2
x
x
,
para x ≠ 0 e x ≠ 1
)
1
(
3
0
)
1
(
3
)
1
(
5
)
1
(
3
3
.
2
)
1
(
3
)
1
(
2
x
x
x
x
x
x
x
x
x
x
x
x
2x – 2 + 6x + 5x2
– 5x = 0
5x2
+ 3x – 2 = 0, (equação de 2º
grau)
Utilizamos agora a fórmula de Bháskara
2a
Δ
b
x
Δ = b2
– 4ac
então
Δ = 32
– 4.5.(-2)
Δ = 49
x =
10
7
3
onde , temos:
x1=
5
2
e x2 = -1
2.2.4 Equações Biquadradas
São as equações que podem ser
colocadas na forma geral ax4
+ bx2
+
c = 0, onde x é a variável e a, b e c são
números reais (a ≠ 0).
Exemplos 7:
1) x4
+ 4x2
– 5 = 0
Fazendo x2
= y e x4
= y2
y2
+ 4y – 5 = 0
Usando a Fórmula de Bháskara temos
Δ = 42
– 4.1.(-5)=36
x =
2
6
4
, y1=-5, y2 =1
Então para y1=-5 temos
x2
= - 5 → 𝑥 = −5 , esta
solução não é aceita no conjunto dos
números reais.
x2
= 1 → 𝑥 = ±1 , esta solução é
aceita no conjunto dos números reais
2) 4x4
– x2
= 0
Fazendo x2
= y e x4
= y2
4y2
- y = 0
22.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
22
Usando a Fórmula de Bháskara temos
Δ = (-1)2
– 4.4.(0)=1
y =
8
1
1
, y1=0 e y2 =1/4
Então para y1=0 temos
x2
= 1/4 → 𝑥 = ±1/2
Resumindo, caso queiramos resolver
este tipo de equação este é o artifício
para transformá-la numa equação de 2º
grau. Assim:
ax4
+ bx2
+ c = 0, substituindo x2
por y
ay2
+ by + c = 0, (equação de 2º grau)
2.2.5 Equações Irracionais
São aquelas que apresentam incógnita
com expoente fracionário ou que tenha
variável sob radical.
1) x1/3
– 4 = 0
2) (x – 3)1/2
– 2 = 0
3) (x + 2)1/2
– 2x = 0
Primeiramente isolamos o termo com
expoente fracionário dos outros. Em
seguida, elevamos ambos os termos da
igualdade à potência que se fizer
necessária, para tornar inteira a
potência.
1) x1/3
– 4 = 0, x1/3
= 4, x = 43
, x = 64
2) (x – 3)1/2
– 2 = 0, (x – 3)1/2
= 2, x – 3
= 22
, x = 4 + 3, x = 7
3) (x + 2)1/2
– 2x = 0, (x + 2)1/2
=
2x, x + 2 = (2x)2
, 4x2
– x – 2 = 0
(Bháskara)
2.2.6 Equações simples de duas
variáveis
São equações da forma ax + by + c = 0,
com a, b e c números reais, sendo a e b
coeficientes não nulos.
1. 4𝑥 + 9𝑦 – 3 = 0
2. 𝑥 – 5𝑦 = 0
3. 3/2𝑥 + 𝑦 = 2
Essas equações com duas variáveis têm
infinitas soluções e podem ser
representadas pela equação da reta
b
c
x
b
a
y
.
Observação: um tratamento mais
aprofundado sobre as formas de
resolução desse tipo de equação será
abordado mais adiante no capítulo
referente a sistemas de equações.
23.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
23
3 Monômios
Nesta seção, vamos estudar
algumas técnicas básicas de álgebra que
fazem parte do conteúdo do Ensino
Fundamental e do Ensino Médio.
Usaremos a fatoração de polinômios e a
fórmula quadrática (fórmula de
Bháskara) para obter as raízes de
polinômios e trabalharemos com
sistemas simples de equações de duas
variáveis.
Os monômios são expressões
algébricas, isto é, que contém variáveis
representadas por letras. Antes de
trabalharmos com adição e subtração de
monômios é necessário que saibamos
reconhecer seus elementos. Por
exemplo, no monômio:
−3𝑥3
𝑦2
Existe uma parte numérica (-3) que
chamamos de coeficiente, e uma parte
literal (x3
y2
). O grau do monômio é
igual à soma das potências da parte
literal, neste caso, 3 e 2, portanto o grau
deste monômio é 5. Quando as partes
literais de dois ou mais monômios
forem idênticas, podemos somá-los ou
subtraí-los para obter outro monômio:
5𝑥3
𝑦2
– 3𝑥2
𝑦2
= 2𝑥3
𝑦2
Para multiplicar ou dividir dois ou mais
monômios, devemos multiplicar ou
dividir os coeficientes numéricos entre
si e as partes literais entre si:
−5𝑥2
. 12𝑥 = −5 . 12 . 𝑥2
. 𝑥 = −60 . 𝑥3
25𝑥6
5𝑥
=
25
5
.
𝑥6
𝑥
= 5𝑥5
4 Polinômios
Os polinômios são expressões
compostas por variáveis e constantes, e
são divididos em termos ou monômios,
onde cada termo contém uma constante
(o coeficiente) e uma ou mais variáveis
elevadas a potências inteiras positivas
(incluindo zero). O polinômio é,
portanto, uma soma de monômios com
partes literais diferentes. O grau de um
termo é igual à soma das potências de
todas as variáveis daquele termo, e o
grau do polinômio é igual ao do termo
de grau mais elevado. Geralmente,
escreve-se um polinômio com os termos
de menor grau à direita e os de maior
grau à esquerda. Como exemplo, um
polinômio de oitavo grau na variável x:
7𝑥8
– 2𝑥7
+ 2𝑥6
+ 11𝑥4
– 𝑥3
+ 9𝑥2
– 1
Note que cada termo na ordem é maior
do que o termo anterior por um fator de
24.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
24
x, mas também que os termos referentes
à primeira e à quinta potência de x
foram omitidos, isto porque seus
coeficientes são iguais a zero.
Inúmeros problemas matemáticos
podem ser descritos na forma de
equações polinomiais, isto é, igualando-
se um polinômio a outro. Equações
polinomiais do primeiro grau, ou
equações lineares, têm a seguinte forma:
b
ax
y
Onde chamamos x de variável
independente e y de variável
dependente. As raízes de um polinômio
são como são chamados os valores da
variável x para o qual o polinômio é
igual a zero. O número máximo de
raízes distintas de um polinômio é igual
ao grau do polinômio.
4.1 Operações com Polinômios
A multiplicação e divisão de polinômios
podem ser realizadas de maneira similar
ao que é feito na aritmética (na
multiplicação e divisão de números). Na
multiplicação, por exemplo, é
necessário realizar o produto de cada
termo de um polinômio por cada termo
do outro. Vejamos alguns produtos
notáveis de polinômios de primeiro
grau:
2
2
2
.
a
ax
x
aa
ax
xa
xx
a
x
a
x
2
2
2
)
)(
(
)
(
)
(
.
a
ax
x
a
a
x
a
a
x
xx
a
x
a
x
2
2
)
(
)
(
.
a
x
a
a
ax
a
x
xx
a
x
a
x
A fatoração de um polinômio consiste
em escrevê-lo na forma de um produto
de polinômios de grau menor. Por
exemplo, como visto acima, o
polinômio de segundo grau x2
+ 2ax +
a2
é igual ao produto de dois polinômios
de primeiro grau.
As raízes de um polinômio serão
sempre raízes de ao menos um dos seus
fatores, e este fato oferece uma maneira
prática de realizar a fatoração, dado que
conhecendo uma raiz b de um
polinômio, pode-se determinar
facilmente que (x - b) é um de seus
fatores. Por exemplo, as raízes do
polinômio x2
– a2
são -a e a, e os seus
fatores são (x + a) e (x – a).
Vejamos um exemplo de fatoração do
polinômio de terceiro grau -x3
+ x2
+ 7x
– 3, que tem como uma de suas raízes o
número 3:
25.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
25
-x3
+ x2
+ 7x – 3 | x – 3
- x3
+3x2
-x2
- 2x + 1
-2x2
+ 7x – 3
-2x2
+6x
x – 3
+x -3
0
5 Sistemas Lineares de Equações
Se um problema contém duas ou mais
variáveis desconhecidas, será necessário
dispor de um sistema de equações
polinomiais para resolvê-lo. Um sistema
com duas equações do primeiro grau e
duas variáveis geralmente é visto na
seguinte forma:
10𝑥 + 5𝑦 = 25
2𝑥 – 3𝑦 = 1
Existem várias maneiras de se resolver
este problema e encontrar os valores de
x e y, conhecidas as constantes.
Por exemplo, é possível multiplicar
ambos os lados da primeira equação por
2 e os da segunda equação por 10, e
então subtrair o resultado da última do
da primeira, obtendo uma equação em
apenas uma variável:
(20𝑥 + 10𝑦 = 50)
− (20𝑥 – 30𝑦 = 10)
40𝑦 = 40
De onde podemos ver que y = 1 e,
portanto, x = 2. De maneira equivalente,
é possível também isolar uma variável
em uma das equações e substituir a
expressão encontrada na outra equação,
obtendo assim da mesma forma uma
equação em uma só variável:
10x + 5y = 25 implica que 5y = 25 –
10x, e então y = 5 – 2x.
Substituindo na segunda equação:
2x – 3(5 - 2x) = 8x – 15 = 1, ou seja,
8x = 16, e x = 2
O que significa que y = 1, como da
primeira vez.
Outro sistema de equações que é
importante analisar é o caso
indeterminado, caso onde temos
infinitas soluções.
x + y =10
2x + 2y =20
-
-
-
26.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
26
Multiplicando a primeira equação por -2
e somando à segunda, temos
x + y = 10
0x + 0y = 0.
Esta segunda equação não tem nenhuma
validade para a resolução do sistema,
pois é verdadeira para qualquer valor de
x e y. Portanto, ela pode ser eliminada
do sistema. O sistema é então reduzido
a uma única equação: x + y = 10. Nesta
equação temos infinitas soluções.
Outro caso importante é um sistema
impossível de obtermos solução.
x + y = 10
2x + 2y = 15
Multiplicando a primeira equação por -2
e somando à segunda, temos
x + y = 10
0x + 0y = -5
O que não é possível.
MÉTODOS DE RESOLUÇÃO DE
SISTEMAS DE EQUAÇÕES DO 1º
GRAU
Além de saber armar o sistema é
bom saber fazer a escolha pelo método
mais rápido de resolução. Vamos
apresentar três métodos sendo que o
mais utilizado é o método da adição.
1º) MÉTODO DA ADIÇÃO
Este método consiste em deixar os
coeficientes de uma incógnita opostos.
Desta forma, somando-se membro a
membro as duas equações recai-se em
um equação com uma única incógnita.
Exemplo:
2x + y = 6
2x + 3y = 2
1º passo: vamos multiplicar a primeira
linha por -1, e em seguida, somamos as
duas equações, assim, eliminamos x.
2x + y = 6. (- 1) - 2x - y = - 6
2x + 3y = 2 2x + 3y = 2
2y = - 4
y = -4/2
y = - 2
2º passo: Substituir y = - 2, em qualquer
um das equações acima e encontrar o
valor de x.
2x + y = 6
2x + ( -2 ) = 6
2x – 2 = 6
2x = 6 + 2
x = 8/2
x = 4
3º passo: dar a solução do sistema.
S = { (4, -2) }
27.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
27
2º) MÉTODO DA SUBSTITUIÇÃO
Este método consiste em isolar uma
incógnita numa equação e substituí-la
na outra equação do sistema dado,
recaindo-se numa equação do 1º grau
com uma única incógnita.
Exemplo:
2x + y = 6
2x + 3y = 2
1º passo: vamos isolar o y na primeira
equação para podermos substituir na
segunda equação.
2x + y = 6
2x + y = 6
y = 6 – 2x
2º passo: Substituir y = 6 – 2x, na
segunda equação para encontrar o valor
de x.
2x + 3y = 2
2x + 3.( 6 – 2x ) = 2
2x + 18 – 6x = 2
- 4x = 2 – 18
- 4x = - 16
- x = -16/4
- x = - 4 . ( - 1 )
x = 4
3º passo: Substituir x = 4 em y = 6 – 2x,
para encontrar o valor de y.
y = 6 – 2x
y = 6 – 2.4
y = 6 – 8
y = -2
4º passo: dar a solução do sistema.
S = { (4, -2) }
3º) MÉTODO DA IGUALDADE
Este método consiste em isolar uma
incógnita numa equação e a mesma
incógnita na outra, depois basta igualar
as duas, recaindo-se numa equação do
1º grau com uma única incógnita.
EXEMPLO:
2x + y = 6
2x + 3y = 2
1º passo: vamos isolar o y na primeira e
na segunda equação para podermos
igualar as equações.
2x + y = 6
2x + y = 6
y = 6 – 2x
2x + 3y = 2
2x + 3y = 2
28.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
28
y = (2 – 2x) / 3
2º passo: igualar as duas equações para
encontrar o valor de x.
6 – 2x = ( 2 – 2x ) / 3
3.( 6 – 2x ) = 2 – 2x
18 – 6x = 2 – 2x
2x – 6x = 2 – 18
-4x = -16
-x = -16/4
-x = -4 . ( -1 )
x = 4
3º passo: Substituir x = 4 em y = 6 – 2x,
para encontrar o valor de y.
y = 6 – 2x
y = 6 – 2.4
y = 6 – 8
y = -2
4º passo: dar a solução do sistema.
S = { (4, -2) }
29.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
29
Exercícios Propostos:
Seção 2.1: Gráficos e Tabelas
1) Localizar no plano cartesiano os
pontos.
a) A(-2,1)
b) B(3,5)
c) C(-1,-4)
d) D(5,-2)
e) E(0,6)
2) Observe o plano cartesiano e dê as
coordenadas dos pontos.
3) Determine a e b de modo que.
a) (𝑎 – 1, 𝑏 + 3) = (2𝑎, 5)
b) (3𝑎 – 3,4) = (−1, 𝑏 – 2)
c) (𝑎 + 𝑏, 3) = (−2, 𝑎 – 𝑏)
d) (𝑎2
, 𝑏 + 3) = (4,4𝑏 – 1)
4) Uma bola se movimenta a uma
velocidade constante de 2m/s
partindo da origem. Construa uma
tabela e um gráfico representando a
posição da bola em função do tempo
nos cinco primeiros segundos de
movimento.
5) Uma pedra, ao cair do alto de
um prédio partindo do repouso, realiza
um movimento vertical com aceleração
da gravidade g que obedece à seguinte
tabela:
Tempo
(s)
Velocidade
(m/s)
0 0
2 20
4 40
6 60
7 70
a) Construa o gráfico referente a essa
tabela e em seguida calcule o valor
da aceleração da gravidade.
b) Dê a equação da reta para esse
caso.
30.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
30
6) Os valores da tabela abaixo foram
obtidos experimentalmente.
x y
1 1,2
2 1,4
5 2
6 2,2
Dentre as sentenças apresentadas nas
alternativas, a que exprime uma relação
possível entre as grandezas
representadas por x e y é:
a) Y = x + 1/5
b) Y = 4x
c) Y = x + 3
d) Y = 2 + 2/x
e) Y = x/5 + 1
7) Observe a figura
O gráfico da função y = ax + b está
representado nessa figura. O valor de a
+ b é:
a) -2
b) 2
c) 7/2
d) 9/2
e) 6
8) O gráfico da função y = mx + n passa
pelos pontos A(1,1) e B(3,-2). Então:
I. m + n = 1
II. m – n = -4
III. m = -3/2
IV. n = -1
V. m.n = 15/4
Assinale a alternativa correta:
a) II e IV são falsas
b) IV e V são falsas
c) II e V são falsas
d) I e III são falsas
e) II e III são falsas
4
2
0
31.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
31
9) Dois atletas A e B fazem teste de
Cooper numa pista retilínea, ambos
correndo com velocidade constante. A
distância (d) que cada um percorre é
mostrada no gráfico abaixo.
Com base no gráfico, a alternativa
correta é:
a) A percorre 400 m em 30 min.
b) A é mais veloz que B, pois
percorre 600 m em 20 min.
c) B é mais veloz que A, pois
percorre 400 m em 5 min.
d) A e B correm na mesma
velocidade.
e) B percorre 1 km em 20 min.
10) O gráfico abaixo é formado por
segmentos de reta e relaciona o valor
de uma conta de água e o
correspondente volume consumido.
O valor da conta, quando o consumo for
de 40 m3
será:
a) R$ 50,00
b) R$ 28,00
c) R$ 27,50
d) R$26,00
e) R$26,50
A
B
10 20
500
300
0 t (min)
30 50
15
40
0
Volume consumido m3
d (m)
Valor da conta R$
32.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
32
Seção 2.2: Equações
1) Resolva as seguintes equações de
1º grau achando suas raízes.
a) 8
x
4
b) 10
x
5
c) 8
x
7
d) 7
x
2
3
e) 12
x
4
x
4
16
f) x
5
27
x
13
x
7
8
g)
4
3
3
x
2
h)
10
x
3
4
1
i) 3
x
4
5
x
4
2
x
9
j) 5
4
10
2
7
.
5
2
.
3
x
x
x
1
4
36
x
5
2
x
12
3
2
x
2) Encontre as raízes das seguintes
equações de 2º grau.
a) 0
6
7
2
x
x
b) 0
28
x
3
x2
c) 0
2
x
5
x
3 2
d) 0
3
x
16
x
16 2
e) 0
16
x
4 2
f) 0
18
x
2 2
g) x
5
x
3 2
h) 0
x
8
x
2 2
i) 2
2
3
x
4
3
x
2
3) Encontre as raízes das seguintes
equações fracionárias.
a) 7
5
1
x
x
b)
4
1 x
x
x
c)
1
5
1
2
1 2
x
x
x
x
x
d)
3
4
5
2
x
x
x
e)
2
1
3
3
1
x
x
f)
2
2
4
2
10
x
x
x
4) Resolva as seguintes equações
irracionais
a) 0
4
x
b) 0
2
x
c) 0
2
1
x
d) 15
x
2
x
e) x
2
4
7
x
2
f) 9
x
2
4
x
1
x
33.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
33
g) 1
2
x
2
x
h) 3
x
9
x 2
5) Construa uma tabela e um gráfico
representando as infinitas soluções
das seguintes equações (para cada
reta utilize no mínimo cinco
pontos)
a) 𝑥 – 3𝑦 = 0
b) 2𝑥 + 𝑦 = 5
c) 2𝑥 – 3𝑦 = 3
d) −4𝑥 – 𝑦 + 3 = 0
e) – 𝑥 + 5𝑦 = 0
Seção 3 - Monômios:
1) Dê o coeficiente, a parte literal e o
grau dos seguintes monômios:
a) −𝑥3
𝑦9
b) 18
c) – 𝑥
d) −7𝑦4
e) 2𝑎6
𝑏2
f) −2𝑥7
/3
2) Efetue as seguintes operações com
monômios:
a) (−2𝑥5
) . (−2𝑎) . (−3𝑥) . (−𝑎)
b) (−40𝑎5
𝑑2
) / (8𝑑4
𝑎)
Seção 4- Polinômios:
1) Calcule a raiz dos polinômios de
primeiro grau:
a) 3𝑥 – 5
b) −11𝑥/6 + 11
2) Dê a expressão algébrica para a raiz
do polinômio geral de primeiro grau,
ax + b.
Seção 4.1 – Operações com Polinômios
1) Fatore o polinômio x2
- 6x + 9 em
dois polinômios de menor grau, dado
que o número 3 é raiz do polinômio.
2) Dê a expressão algébrica para o
produto de dois polinômios de primeiro
grau na variável x. Escreva os dois
polinômios como (ax + b) e (cx + d).
Seção 5 – Sistemas de Equações
34.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
34
1) Encontre os valores de x e y que
satisfazem os sistemas de equações
abaixo:
a) 4𝑥 + 5𝑦 = 47
5𝑥 + 4𝑦 = 43
b) 𝑥 + 3𝑦 = 4
12x – 7y = 7
c)
2
𝑥
+
3
𝑦
=
14
15
5/x + 4/y = 1/30
Equações do Segundo Grau
1) Resolva as seguintes equações
polinomiais do segundo grau pelo
método que preferir:
a) 𝑥2
– 6𝑥 + 6 = 0
b) 𝑥2
– 19𝑥/3 + 10 = 0
2) Resolva o seguinte problema: um
móvel parte em linha reta da origem
para a direita com velocidade inicial
igual a vinte metros por segundo e
aceleração igual a dez metros por
segundo ao quadrado. Neste mesmo
instante, outro móvel se encontra dez
metros à frente, com velocidade igual a
zero, mas aceleração igual a vinte
metros por segundo ao quadrado.
Determine o tempo em segundos e a
posição em que os dois se encontram,
pela primeira e segunda vez.
Equação do MRU (movimento com
velocidade constante): x = x0 + vt
Equação do MRUV (movimento com
aceleração constante): x = x0 + v0t +
at2
/2
3) É interessante perceber que a
soma das duas raízes de uma equação
do segundo grau é igual a –b/a, e o seu
produto, igual a c/a. Mostre isto a partir
da fórmula de Bháskara.
Raízes Complexas
1) Tente resolver o problema dos
móveis da seção anterior para o caso do
segundo móvel ter aceleração de vinte
metros por segundo ao quadrado. O que
significa o fato de obtermos raízes
complexas? Os móveis se encontram?
2) Resolva a equação do segundo grau
e substitua a solução na equação para
confirmar seu resultado. Lembre-se que
i2
= -1.
Respostas Módulo 2
Seção 2.1
35.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
35
5)a)
-1 0 1 2 3 4 5 6 7 8
-10
0
10
20
30
40
50
60
70
80
velocidade
(m/s)
tempo (s)
b) V(t) = 10t
********************************
6) letra e
********************************
7) letra b
********************************
8) letra b
********************************
9) letra d
********************************
10) letra c
********************************
Seção 2.2
1)a) x= 2 b) x = -2 c) x = 1 d) x = 5
e) x = 0 f) x = 2 g) x = 9/8 h) x = 5/6
i) x = 6 j) x = 4 k) x = 8
2)
a) x = 6 e x = 1
b) x = -7 e x = 4
c) x = -1 e x = -1/3
d) x = -3/4 e x = -1/4
e) x = 2 e x = - 2
f) x = 3 e x = -3
g) x = 0 e x = 5/3
h) x = 0 e x = -4
i) x = 0 e x = 1
********************************
3)
a) x = 6 e x = -6
b) x = 2 e x = 2
c) x = 1 e x = 3
d) x = 22/5
e) x = -5/7
f) x = 4 e x = -4
********************************
4)
a) x = 16
b) não existe
c) x = 3
d) x = 9 e x = 25
f) x = - 5 e x = 8
g) x = 9/4
h) x = 0 e x = 3
********************************
Seção 3
1)a) Coef. = -1
Liter. = x3
y9
Grau = 12
b) Coef. = 18
Liter. = não tem
Grau = 0
c) Coef. = -1
Liter. = x
Grau = 1
d) Coef. = -7
Liter. = y4
Grau = 4
e) Coef. = 2
Liter. = a6
b2
Grau = 8
f) Coef. = -2/3
Liter. = x7
Grau = 7
********************************
36.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
36
2) a) 12x6
a2
b)
−5𝑎4
𝑑2
********************************
Seção 4
1) a) x =
5
3
b) x = 6
********************************
2)x = −
𝑏
𝑎
********************************
Seção 4.1
1)(x-3)(x-3)
********************************
2) acx2
+(ad + bc)x + bd
********************************
Seção 5
1)a) x = 3 e y = 7 b) x =
40
43
e y =
44
43
c) x = −
210
109
e y =
35
23
********************************
Seção 6
1)a) x = 3 ± 3 b) x =
10
3
********************************
2) primeiro tempo 2 − 2
segundo tempo 2 + 2
Módulo 3: Funções
37.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
37
Antes de dar uma definição formal de
função mostram-se necessárias outras
duas definições, a saber, a de produto
cartesiano e a de relação entre dois
conjuntos.
De acordo com [1], temos a definição
de produto cartesiano:
Produto Cartesiano: Sejam A e B
conjuntos diferentes do vazio. Chama-
se produto cartesiano de A por B, e
indica-se por B
A , o conjunto cujos
elementos são todos os pares ordenados
)
,
( y
x , tais que A
x e B
y , ou seja:
}
|
)
,
{( B
y
e
a
x
y
x
B
A
Também na mesma referência,
encontramos uma boa definição de
relação entre dois conjuntos:
Relação entre dois conjuntos: Dados
dois conjuntos A e B, chama-se relação
R de A em B todo subconjunto do
produto cartesiano B
A .
Finalmente estamos aptos a definir de
maneira precisa o que é uma função,
segundo as palavras encontradas na
referência [1]:
Função: Sejam A e B conjuntos
diferentes do vazio. Uma relação f de A
em B é função se, e somente se, todo
elemento de A estiver associado,
através de f, a um único elemento de B.
Vamos explorar um pouco estas
definições através de exemplos.
Exemplo 1 – Produto cartesiano:
Sejam os conjuntos A={1,2,3} e
B={4,5,6}, então o produto cartesiano
B
A é dado por:
(3,6)}
(3,5),
(3,4),
(2,6),
(2,5),
(2,4),
(1,6),
(1,5),
{(1,4),
B
A
Exemplo 2 – Relação entre dois
conjuntos:
Sejam os mesmos conjuntos A e B do
exemplo 1. Seja a relação R dada por:
}
2
|
)
,
{( x
y
B
A
y
x
R
.
Neste caso, o subconjunto dado pela
relação R é formado pelos elementos:
)}
6
,
3
(
),
4
,
2
{(
R
Aqui cabem mais quatro definições:
Domínio [1]: o conjunto formado pelos
primeiros elementos dos pares
ordenados de uma relação R entre dois
38.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
38
conjuntos. Representamos este conjunto
por )
(R
Dom .
No exemplo 2 temos {2,3}
)
(
R
Dom .
Imagem [1]: o conjunto formado pelos
segundos elementos dos pares
ordenados de uma relação R entre dois
conjuntos. Representamos este conjunto
por ).
Im(R
No exemplo 2 temos }
6
,
4
{
)
Im(
R .
Conjunto de partida: o conjunto que
contém ou é igual ao Domínio de uma
relação R entre dois conjuntos.
No exemplo 2 temos A sendo o
conjunto de partida da relação R.
Conjunto de chegada (contradomínio):
o conjunto que contém ou é igual a
imagem de uma relação R entre dois
conjuntos.
No exemplo 2 temos B sendo o
conjunto de chegada, ou contradomínio,
da relação R.
Note que R do exemplo 2 não é uma
função de A em B pois o elemento 1 do
conjunto de partida A não possui
imagem no conjunto de chegada B.
Exemplo 3 – Função:
Sejam os conjuntos A={1,2,3,4} e
B={1,4,9,16,25} e a relação R dada por:
}
|
)
,
{( 2
x
y
B
A
y
x
R
Neste caso a relação R de fato é uma
função pois todo elemento de A possui
uma única imagem em B.
O conjunto R é dado por:
R={(1,1),(2,4),(3,9),(4,16)}
Note que ele é apenas um subconjunto
de B
A , como especifica a definição
de relação. Ainda, devemos perceber
que o domínio coincide com o conjunto
de partida e que a imagem está contida
no contradomínio, sendo, portanto,
menor que este em quantidade de
elementos.
Exemplo 4:
Sejam os conjuntos: A={1,4,9} e B={-
3,-2,-1,1,2,3}. Seja também a relação R
dada por:
}
|
)
,
{( x
y
B
A
y
x
R
Neste caso R não é uma função de A em
B, porque cada elemento de A, o
conjunto de partida, está associado por
meio de R a dois elementos de B.
39.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
39
Em geral trabalha-se com funções cujo
domínio e contradomínio são compostos
pelo inteiro corpo dos números reais. A
imagem acaba sendo um conjunto
menor ou igual ao contradomínio.
Exemplo 5:
Seja A=B= (o conjunto dos números
reais). Seja a relação R dada por:
}
|
)
,
{( 2
x
y
B
A
y
x
R
Vemos que a relação dada de fato é uma
função, pois todo elemento de A possui
uma única imagem em B. Notamos
também que, embora o domínio e o
conjunto de partida coincidam (e
sempre devem coincidir para que a
relação R seja uma função) a imagem
está contida no contradomínio. Isto
acontece freqüentemente.
Vejamos o comportamento do domínio
de algumas funções que nos ajudarão a
interpretar também as equações da
Física.
1) Qual o domínio a função dada por
4
10
2
x
x
y ?
O domínio é o conjunto de todos os
números x reais para os quais é possível
realizar as operações indicadas. No
caso, potência (x2
), produto (10x), soma
e subtração podem ser realizadas para
quaisquer números reais.
Assim, o domínio da função dada por
4
10
2
x
x
y é o conjunto dos
números reais D= .
2) Qual o domínio a função
dada por
8
2
10
x
y ?
O domínio é o conjunto de todos os
números x reais para os quais é possível
realizar as operações indicadas. No
caso, a única restrição é a divisão, que
não está definida quando o divisor é
zero.
Devemos ter então: 0
8
2
x ou
.
4
x
Assim, o domínio da função, dada por
8
2
10
x
y , é o conjunto dos números
reais menos o número 4 ou podemos
ainda escrever D = -
4 .
3) Qual o domínio a função dada por
5
1
x
y ?
Neste caso, devemos ter:
40.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
40
* 0
5
x , para que exista
5
x , ou seja, devemos ter
.
5
x
* 0
5
x , para que exista
5
1
x
. Então, devemos ter
5
0
5
x
x .
Das duas condições acima vemos que a
solução é válida para x >5
Logo, o domínio da função dada por
5
1
x
y é o conjunto
5
x
R
x
D
.
3.1 Funções do 1° Grau
Função do primeiro grau é toda função
que associa a cada número real 𝒙 o
número real 𝑎𝑥 + 𝑏, 0
a . Os
números reais 𝒂 e b são chamados,
respectivamente, de coeficiente
angular e coeficiente linear. O par
(0,b), é a intersecção da reta y = ax + b
com o eixo y, ou seja, b indica a
distância do ponto (0,b) à origem do
sistema de coordenadas.
Quando 𝒂 > 0 a função 𝒇(𝒙) = 𝒂𝒙 +
𝒃 é crescente, isto é, à medida que x
cresce 𝒇(𝒙) também cresce. Quando
𝒂 < 0 a função 𝒇(𝒙) = 𝒂𝒙 + 𝒃 é
decrescente: à medida que x cresce 𝒇(𝒙)
decresce.
O gráfico da função 𝒇(𝒙) = 𝒂𝒙 + 𝒃 é
uma reta não paralela aos eixos
coordenados se 𝑎 ≠ 0.
O domínio de 𝒇(𝒙) = 𝒂𝒙 + 𝒃 é 𝑫(𝒇) =
ℝ.
x
b
y
a
ax
b
y
b
ax
y
pois
a
x
b
y
adjacente
cateto
oposto
cateto
tg
,
A imagem de f é 𝑰𝒎(𝒇) = ℝ
Se a = 0 então a função f(x) = b é
uma função constante.
Se b = 0 então temos f(x) = ax.
Trata-se de um conjunto de retas
com inclinação a, todas passando
na origem (0,0).
Considerando a figura abaixo com a
inclinação :
41.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
41
Observe que:
* se 90° < < 180° ou 270° < < 360°
então tg é negativa e, portanto a é
negativo.
* se 0 < < 90° ou 180° < < 270°
então tg é positiva e portanto a é
positivo.
Exemplo 6:
𝑎) 𝑓(𝒙) = 𝟐𝒙 + 𝟑 é uma função de
primeiro grau crescente porque
𝒂 > 0.
b) f(x) = 2x + 20, é uma função de
primeiro grau crescente porque 𝒂 > 0.
c) y = 3 - 2x é uma função de primeiro
grau decrescente porque 𝒂 < 0.
d) f(x) = -3x é uma função de primeiro
grau decrescente porque 𝒂 < 0.
3.2 Função Constante
É toda função do tipo 𝒇(𝒙) = 𝒌 que
associa a qualquer número real um
mesmo número real.
A apresentação gráfica será sempre uma
reta paralela ao eixo do x, passando por
𝒚 = 𝒌..
O domínio da função 𝒇(𝒙) = 𝒌 é
𝑫(𝒇) = ℝ.
O conjunto imagem é o conjunto
unitário 𝑰𝒎(𝒇) = {𝒌}.
Exemplo 7:
1) 𝒇(𝒙) = 𝟐
2) 𝒇(𝒙) = – 𝟑
42.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
42
Aplicação em Física
O MOVIMENTO RETILÍNEO E UNIFORME
Movimento mais simples da cinemática.
Recebe o nome retilíneo por considerar
apenas trajetórias sobre linhas retas. É
dito uniforme por possuir velocidade
constante, ou seja, distâncias iguais são
percorridas em intervalos de tempo
iguais.
Dizer que a velocidade é constante
significa dizer que ela não varia com o
tempo, não muda em um intervalo de
tempo considerável. Uma vez que a
velocidade é constante, a aceleração,
que trata da variação da velocidade é
nula.
Como a velocidade é constante, a
velocidade instantânea é igual à
velocidade média (vm = v). Se o móvel
partir de uma posição inicial e se
movimentar com uma velocidade v
durante um tempo t, tem-se a equação
horária do movimento retilíneo
uniforme:
DIAGRAMA HORÁRIO DAS POSIÇÕES
Movimento retilíneo uniforme: o
gráfico abaixo apresenta retas (equações
do 1º grau). Este gráfico mostra como
varia a posição de um móvel durante o
seu movimento.
*Retas inclinadas ascendentes indicam
um movimento progressivo.
*Retas inclinadas descendentes indicam
um movimento retrógrado.
*Retas horizontais indicam que o corpo
está em repouso.
Propriedade: a inclinação das retas deste
gráfico representa a velocidade do
móvel.
Velocidade versus tempo
t
v
S
t
S 0
V > 0
Movimento Progressivo
V
d (m)
t (s)
0
43.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
43
3.3 Função Módulo
A função definida por 𝒚 = |𝒙| chama-
se função módulo. O seu domínio é o
conjunto 𝑫(𝒇) = ℝ e o conjunto
imagem é 𝑰𝒎(𝒇) = [𝟎, ∞). Então, da
definição de módulo, dado um número
real x, o módulo (ou valor absoluto)
dex, que se indica por | x |, é definido
por:
0
,
0
,
x
se
x
x
se
x
x
O significado destas sentenças é:
i) o módulo de um número real
não negativo é o próprio número.
ii) o módulo de um número real
negativo é o oposto do número.
Então
se x é positivo ou zero, | x | é
igual a x.
| 3 | = 3
se x é negativo, | x | é igual a -
x.
| - 3 | = -(-3) = 3
Exemplos:
1) Dada a função f(x) = |2x – 8|,
calcular:
a) f(5) = |2.5 – 8| = |10 – 8| = |2| = 2
b) f(-4) = ??? (Para você fazer agora)
2) Resolver a equação | x2
-5x | = 6.
Resolução: Temos que analisar dois
casos:
caso 1: x2
-5x = 6
caso 2: x2
-5x = -6
Resolvendo o caso 1:
x2
-5x-6 = 0 => x‟=6 e x‟‟=-1.
Resolvendo o caso 2:
x2
-5x+6 = 0 => x‟=3 e x‟‟=2.
Resposta: S={-1,2,3,6}
3) Resolver a equação | x-6 | = | 3-2x|.
V < 0
Movimento Retrógrado
V
t
44.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
44
Resolução: Temos que analisar dois
casos:
caso 1: x-6 = 3-2x
caso 2: x-6 = -(3-2x)
Resolvendo o caso 1:
x-6 = 3-2x => x+2x = 3+6 => 3x=9
=> x=3
Resolvendo o caso 2:
x-6 = -(3-2x) => x-2x = -3+6 => -
x=3 => x=-3
Resposta: S={-3,3}
Gráfico
O gráfico de f(x) = |x| é semelhante ao
gráfico de f(x) = x, sendo que a parte
negativa do gráfico será “refletida”
sempre para um f(x) positivo.
Um outro exemplo para uma função
modular seria a função modular do 2º
grau, sendo f(x) = |x2
– 4|, assim:
2
|
|
,
4
2
|
|
,
4
)
( 2
2
x
se
x
x
se
x
x
f
assim temos o gráfico:
Passos
Para construir o gráfico da função
modular procedemos assim:
1º passo: construímos o gráfico da
função onde f(x)> 0
2º passo: onde a função é negativa,
construímos o gráfico de – f(x)
(“rebate” para o outro lado na vertical).
3º passo: une-se os gráficos
Exemplos:
1) f(x) = |x|
45.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
45
2) f(x) = |x –2|
3) f(x) = |x2
– 4|
3.4 Função Quadrática
A função 𝒇: ℝ → ℝ definida por
𝒇(𝒙) = 𝒂𝒙² + 𝒃𝒙 + 𝒄, 𝒂 ≠ 𝟎 é chamada
função de 2° grau ou função quadrática.
Seu domínio é 𝑫(𝒇) = ℝ.
O gráfico de uma função quadrática é
uma parábola com eixo de simetria
paralelo ao eixo dos 𝒚. Se o coeficiente
de 𝒙² for positivo (𝒂 > 0), a parábola
tem a concavidade voltada para cima
(côncava). Se 𝒂 < 0, a parábola tem a
concavidade voltada para baixo
(convexa). A interseção do eixo de
simetria com a parábola é um ponto
chamado vértice. A interseção da
parábola com o eixo dos 𝒙 define os
zeros da função.
3.5 Zeros (ou raízes) de uma função
do 2° Grau
Denominam-se zeros ou raízes de uma
função quadrática os valores de x que
anulam a função, ou seja, que tornam
f(x) = 0. Em termos de representação
gráfica, são as abscissas dos pontos
onde a parábola corta o eixo x.
Denomina-se equação do 2º grau com
uma variável toda equação da forma ax2
+ bx + c = 0 , onde x é a variável e a, b,
c reais com a ≠ 0.
Observação: c é a ordenada do ponto
(0, c), onde a parábola corta o eixo y.
Resolver uma equação significa
determinar o conjunto solução (ou
conjunto verdade) dessa equação. Para a
resolução das equações do 2º grau,
utilizamos a Fórmula Resolutiva ou
Fórmula de Bháskara dada abaixo:
ac
b
onde
a
b
x 4
,
2
2
Se 0
temos raízes reais;
46.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
46
Se<0, não temos raízes reais, mas sim
raízes complexas.
Exemplo 8:
1) Dada a função f(x) = x² - 6x +5,
calcular os zeros desta função.
Primeiramente devemos identificar os
coeficientes:
a=1 b = -6 c = 5
Calcular :
16
5
1
4
)
6
(
4
2
2
ac
b
Como o resultado foi positivo, vamos
obter os valores x solução:
1
5
1
2
16
)
6
(
2a
b
x
Solução final S={1,5}.
2) Determine as soluções de :
x² - 8x +16 = 0
Novamente identificam-se os
coeficientes:
a=1 b= -8 c= 16
Então obtemos :
0
16
1
4
)
8
(
4
2
2
ac
b
E finalmente as soluções:
4
1
2
0
)
8
(
2
a
b
x
Logo, a solução será S={4}
3)Determine (se existirem) as raízes da
função f(x)= x²-2x+20
Identificar os coeficientes:
a=1 b= -2 c= 20
Calcular :
76
80
4
4
2
ac
b
Logo, quando o (discriminante) é um
número negativo não existe solução no
conjunto dos números reais. Veja:
2
76
4
2
a
b
x
Ops!? Não existe raiz quadrada de
número negativo!
A solução é
S , chamada solução
vazia ou nula.
Dada uma função quadrática qualquer
𝒚 = 𝒂𝒙² + 𝒃𝒙 + 𝒄, com 𝒂 ≠ 𝟎,
usando a técnica de completar os
47.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
47
quadrados, podemos facilmente
escrevê-la na forma
𝒚 = 𝒂(𝒙 – 𝒙𝒗)𝟐
+ 𝒚𝒗
onde
sendo (xv, yv) o vértice da parábola.
Neste caso o eixo de simetria é dado por
x = xv.
Dedução
Seja ax² + bx +c, isolando a temos:
v
v y
x
x
a
a
ac
b
a
b
x
a
c
a
b
a
b
x
a
a
c
a
b
a
b
x
a
b
x
a
a
c
x
a
b
x
a
c
bx
ax
2
2
2
2
2
2
2
2
2
2
2
2
)
(
4
4
2
4
2
4
4
2
2
onde
𝑥𝑣 = −
𝑏
2𝑎
e 𝑦𝑣 = −
∆
4𝑎
Exemplo 9:
1) A parábola dada por 𝐲 = 𝐱
2
– 𝟔𝐱 +
𝟓 pode ser escrita como:
4
)
3
( 2
x
y
O vértice da parábola é (𝒙𝒗, 𝒚𝒗) =
(𝟑, – 𝟒) e o eixo de simetria é 𝒙 = 𝟑.
3.6 Valor máximo e valor mínimo da
função do 2° Grau
Examinando os gráficos abaixo,
observa-se que:
* Se 0
a então
a
yv
4
é o valor
mínimo da função;
* Se 0
a então
a
yv
4
é o valor
máximo da função.
48.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
48
Podemos encontrar os máximos e
mínimos desta maneira para uma função
de segundo grau.
Aplicação em Física
A função do 2º grau está presente em
inúmeras situações cotidianas. Na Física
ela possui um papel importante na
análise dos movimentos uniformemente
variados (MUV), pois em razão da
aceleração, os corpos variam tanto sua
posição quanto sua velocidade em
função do tempo. A expressão que
relaciona o espaço em função do tempo
é dada pela expressão
2
0
0
2
1
at
t
v
S
S
onde a é a aceleração, S0 é a posição
inicial e V0 é a velocidade inicial.
Exemplo 10:
Um móvel realiza um MUV
obedecendo à função S = 2t2
- 18t + 36,
sendo S medido em metros e t em
segundos. Em que instante o móvel
muda o sentido de seu movimento?
Resolução: A equação do movimento é
do segundo grau, então ela descreve
uma parábola côncava (a = 2, a > 0). A
mudança de sentido de movimentação
do móvel se dará no momento em que
ele atingir o ponto mínimo da parábola.
Observe a ilustração do movimento do
móvel (gráfico de S versus t):
Devemos calcular o ponto mínimo da
parábola (mínimo valor da posição),
dado por:
𝑡𝑣 = −
𝑏
2𝑎
= −
−18
2.2
=
18
4
= 4,5𝑠
Exemplo 11:
Um canhão atira um projétil,
descrevendo a função s = -9t2
+ 120t,
sendo s em metros e t em segundos.
Calcule o ponto máximo de altura
atingida pelo projétil. (Veja o gráfico de
S versus t para este caso).
Resolução: A função do movimento do
projétil descreve uma parábola convexa
(a = -9, a < 0). O ponto máximo da
parábola será a altura máxima atingida
pelo projétil.
49.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
49
Ponto máximo:
𝑆𝑣 = −
∆
4𝑎
= −
120 2
− 4. −9 . 0
4. −9
𝑆𝑣 = −
14400
−36
= 400𝑚
3.7 Função Polinomial
É a função 𝒇: 𝑹 → 𝑹 definida por
𝒇 𝒙 = 𝒂𝟎𝒙𝒏
+ 𝒂𝟏𝒙𝒏−𝟏
+. . . + 𝒂𝒏−𝟏𝒙 +
𝒂𝒏
em que ao, a1,..., an são números
reais chamados coeficientes e n, inteiro
não negativo, determinam o grau da
função.
O gráfico de uma função polinomial é
uma curva que pode apresentar pontos
de máximos e de mínimos. Seu domínio
é sempre o conjunto dos Reais.
Exemplos:
1) A função constante 𝒇(𝒙) = 𝒌 é uma
função polinomial de grau zero.
2) A função 𝒇(𝒙) = 𝒂𝒙 + 𝒃, 𝒂 ≠ 𝟎 é
uma função polinomial de primeiro
grau.
3) A função quadrática 𝒇(𝒙) = 𝒂𝒙𝟐
+
𝒃𝒙 + 𝒄, 𝒂 ≠ 𝟎 é uma função
polinomial de segundo grau.
4) A função 𝒇(𝒙) = 𝒙𝟑
é uma função
polinomial cúbica.
5) A função f(𝒙) = 𝟓𝒙𝟓
– 𝟔𝒙 + 𝟕 é
uma função polinomial de quinto grau.
3.8 Gráficos
Se desenharmos duas retas
perpendiculares entre si e dermos a elas
uma escala apropriada construímos um
plano cartesiano. Por comodidade
orienta-se uma das retas
horizontalmente no papel e a outra,
como conseqüência da ortogonalidade à
primeira, estará orientada verticalmente.
Chamaremos o eixo horizontal de
abscissa e o vertical de ordenada.
Se representarmos cada par ordenado
(x,y) de uma relação entre dois
conjuntos no plano cartesiano estaremos
construindo o gráfico da relação em
questão.
Exemplo 12:
Sejam os conjuntos A e B e a relação
R={(x,y) A×B | y= x2
}. A
representação gráfica de R é dada pela
figura abaixo, onde restringimos o
domínio ao intervalo [-3,3] e o
contradomínio ao intervalo [0,9]:
50.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
50
Exercícios Propostos
1) O gráfico abaixo indica a posição de
um móvel no decorrer do tempo, sobre
uma trajetória retilínea. Determine: a) a
velocidade do móvel. b) a função
horária s(t) do móvel.
2) O gráfico abaixo indica a posição de um
móvel no decorrer do tempo, sobre uma
trajetória retilínea. Determine: a) a
velocidade do móvel. b) a função
horária s(t) do móvel.
3) Dada a função f, calcule os zeros desta
função, sendo:
4) Determinar o domínio da função dada
por:
a) 4
10
x
y
b) 1
10
x
y
c) x
y
9
d)
6
2
x
y
e)
x
x
y
4
f)
9
10
x
y
g) 5
x
y
h) 3
4
x
y
51.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
51
i)
8
6
1
x
y
j)
4
15
x
y
k)
3
4
1
x
y
5) Representar graficamente as
funções dadas por:
a) 4
10
x
y
b) 4
10
x
y
c) 4
y
d) x
y
e) 4
4
x
y
f)
x
y
1
g) 9
x
6) Encontre as raízes das seguintes
funções abaixo:
a) 4
10
x
y
b) x
y
c) 4
y
d) 4
x
y
e)
4
10
1
x
y
f)
3
1
x
y
g)
4
1
x
y
7) Represente geometricamente uma
reta que:
(a) passe pelo ponto (2, 0) e que tenha
coeficiente angular igual a -2.
(b) passe pelo ponto (0, 2) e que tenha
coeficiente angular igual a -2.
(c) passe pelo ponto (0, −2) e que tenha
coeficiente angular igual a 2.
(d) passe pelo ponto (1, 2) e que tenha
coeficiente angular igual a -1.
(e) passe pelo ponto (−1, 2) e que tenha
coeficiente angular igual a 1/2.
(f) passe pelo ponto (−1, 0) e que tenha
coeficiente angular igual a -1/2.
8) Obtenha as funções de 1º grau que
passam pelos pares de pontos abaixo:
a) (-1, 2) e (2, -1)
b) (-1, 0) e (3, 2)
c) (3,2) e (-1,0)
52.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
52
9) Determine a equação da reta cujo
gráfico está representado abaixo:
10) Determine a função do 1º grau cujo
gráfico passa pelo ponto (2, 3) e cujo
coeficiente linear vale 5.
11) Dada a função y = 3x – 2, encontre
o valor de x em que a ordenada y é o
seu dobro.
12) Dada a função y = –2x + 1, encontre
os valores onde a reta intercepta os
eixos x e y.
13) Dada a função y = 2/3x + 10.
Encontre os valores onde a reta
intercepta os eixos x e y.
14) Determine a equação da reta que
passa por (1,5) e tem coeficiente
angular igual a 20.
15) Seja a reta dada por y = -3x + b.
Determine o valor de b para que a reta
corte o eixo as ordenadas no ponto
(0,5).
16) Dadas as funções 2
)
(
x
x
f e
4
)
(
x
x
g , encontre os valores de x
para os quais )
(
)
( x
f
x
g .
53.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
53
Respostas do Módulo 3
1)a) V= 10 m/s
b) S(t) = 10 + 10t
********************************
2) a) V= 10 m/s
b) S(t) = 10 + 10t
********************************
3) a) x = 1 e x = 6
b) 𝑥 =
1±𝑖 23
2
c) x = -1 e x = -1
d) x = ± 3
e) x = ±6
f) x = 4 e x = 4
g) x = - 9 e x = - 9
********************************
4) a)
b)
c)
d) S = {x ∈ ℝ/ x ≠ 6}
e) S = {x ∈ ℝ/ x ≠ 0}
f)
g)S = {x ∈ ℝ/ x ≥ 5}
h)
i) S = {x ∈ ℝ/ x ≠
4
3
}
j) S={x ∈ ℝ/ x ≥ −
15
4
}
k) S={x ∈ ℝ/ x >
3
4
}
********************************
5) a)
b)
c)
54.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
54
d)
e)
f)
g)
********************************
6) a) x = −
2
5
b) x = 0
c) Não tem
d) x = 4
e) Não tem
f) Não tem
g) Não tem
7) a) reta y = -2x + 4
7,5 8,0 8,5 9,0 9,5 10,0 10,5
-2
0
2
4
6
8
y
x
55.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
55
b) reta y = -2x+2
c)Reta y = 2x – 2
d) Reta y = - x + 3
e) reta y =
𝑥+5
2
f) reta y =
−𝑥−1
2
********************************
8) a) y = -x +1
b)y =
𝑥+1
2
c) y =
𝑥+1
2
********************************
9) y = −
3𝑥
2
+ 3
********************************
10) y = - x + 5
********************************
11) x = 2
********************************
12) (
1
2
, 0 ) e (0,1)
56.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
56
********************************
13) (−
1
15
, 0) corta o eixo x e não
intercepta o eixo y.
********************************
14) y = 20x – 15
********************************
15) b = 5
********************************
16) Não existe (retas paralelas).
Módulo 4: Trigonometria
Trigonometria é o ramo da Matemática
que trata das relações entre os lados e
ângulos de triângulos (polígonos com
três lados). Ao lidar com a
determinação de pontos e distâncias em
três dimensões, a trigonometria ampliou
sua aplicação à Física, à Química e a
quase todos os ramos da Engenharia,
57.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
57
em especial no estudo de fenômenos
periódicos como a vibração do som e o
fluxo de corrente alternada.
4.1 Arcos e ângulos
Medindo arcos de circunferência: A
medida do comprimento de um arco de
circunferência pode ser feita utilizando-
se qualquer das unidades usadas para
medir seu raio, como o metro, o
centímetro, etc. No entanto, medir o
ângulo subentendido por um dado arco
não requer o uso de unidades, ou seja,
um ângulo é adimensional.
Usam-se diferentes medidas padrão para
quantificar uma dada abertura
subentendida por um arco. Por exemplo,
o que se convencionou chamar de 1
grau de abertura foi o arco resultante da
subdivisão de uma inteira circunferência
em 360 partes iguais; já o que
convencionou-se chamar de 1 radiano
foi o arco subentendido por um
comprimento exatamente igual ao raio
da circunferência; chama-se de 1 grado
à uma parte em 400 da circunferência.
Sendo assim, existem diferentes
maneiras de quantificar um determinado
ângulo. Adota-se nas ares de
Matemática e Física a quantidade
natural de radianos e nas Engenharias o
grau é mais difundido.
Uma vez esclarecidas as definições das
diferentes escalas de medidas de
ângulos (arcos de circunferências)
podemos estabelecer equivalências
entre elas. Para este fim, vamos definir
um número especial: .
É fato que toda circunferência têm um
determinado comprimento (C). É fato
também que elas possuem um diâmetro
(D). Embora não seja de óbvia
visualização, um terceiro fato é que a
razão entre a circunferência e o
diâmetro (C/D) é um número constante
e irracional. (Faça a experiência de
medir o diâmetro de várias
circunferências distintas e seu
comprimento – use um barbante para
esta última medida – e veja per si que a
razão a assertiva feita a respeito da
razão C/D é verdadeira).
Convencionou-se chamar a este número
irracional de . Assim, define-se:
14159
,
3
D
C
Uma vez que D=2R, onde R é o raio da
circunferência, obtemos a fórmula
(conhecida de alguns):
R
C
2
58.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
58
que fornece o comprimento total de uma
circunferência.
Precisamos falar de para estabelecer a
relação requerida entre as medidas de
ângulos graus e radianos. Mas ainda
falta uma coisa: descobrir a relação
entre uma dada abertura subentendida
por um arco de circunferência e o
comprimento deste arco.
Pode-se notar que dada uma abertura
qualquer , ela corresponderá a um
comprimento r. Ao dobrarmos o ângulo
de abertura, tomando 2 ao invés de , e
medirmos o comprimento
correspondente a esta nova abertura,
obteremos a medida 2r, ao invés do r
que tínhamos antes. Triplicando ou
quadruplicando a abertura,
correspondentemente triplicamos ou
quadruplicamos o comprimento do arco.
Concluímos assim que o comprimento
de um arco é diretamente proporcional
ao ângulo subentendido por este.
Anotamos isso por:
r
e a igualdade é estabelecida com o uso
de uma constante k, a ser determinada:
k
r
Ora, discorremos anteriormente
sobre o fato de que o inteiro
comprimento de uma circunferência é
dado por 2R, sendo R o raio da
circunferência.
Se convencionarmos chamar de
2 o ângulo que compreende uma volta
inteira na circunferência, iremos obter:
2
k
C
que irá fornecer diretamente o valor de
k:
R
k
Isso se o ângulo foi medido em
radianos. De modo justo o leitor irá
perguntar: porque em radianos? Note
que, caso k seja o próprio raio da
circunferência teremos a seguinte
relação entre comprimento de um arco
qualquer e o ângulo que o mesmo
subentende:
R
r
R
r
e notamos que, quando =1 o
comprimento r será o próprio raio R da
circunferência. Mas esta é a própria
definição da escala de arcos radiano.
Conclui-se disso que a escala natural
para medida de arcos é a escala radiano,
59.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
59
sendo o ângulo subentendido pela
inteira circunferência de 2radianos.
Caso o ângulo tivesse sido dado em
graus a constante de proporcionalidade
k teria um valor diferente. Note que
neste caso teríamos o ângulo total
compreendido por uma volta completa
na circunferência dado por 360 graus.
Levando na expressão do comprimento
de um arco teríamos:
360
k
C
que quando comparada com C=2R
forneceria o valor:
R
k
360
2
que torna evidente o fato de que um
grau corresponde exatamente a 1/360 do
comprimento total da circunferência,
bastando fazer =1 na expressão que
relaciona o comprimento de um arco
com o ângulo subentendido por este.
Agora estamos aptos a estabelecer uma
equivalência entre escalas de ângulos.
Ora, determinamos duas constantes de
proporcionalidade distintas para a
medida do comprimento de um arco em
função de um ângulo de abertura
qualquer, uma constante para o ângulo
de medida dado em graus e outra para o
mesmo ângulo dado em radianos.
Obviamente que o comprimento do arco
não deve depender da constante de
proporcionalidade. Essa é a observação
crucial no estabelecimento da relação
entre escalas desejada, pois:
graus
rad
rad
graus
radianos
graus
R
R
r
r
180
360
2
A relação acima pode ser usada para
converter uma escala na outra, radianos
em graus e vice-versa. Finalmente note
que:
o
o
rad 017453
.
0
180
1
ou, equivalentemente:
rad
rad
o
296
.
57
180
1
Para finalizar a descrição de arcos e
ângulos cabe notar que a escala grau é
subdividida em minutos e segundos de
acordo com a seguinte correspondência:
0
6
1
0
6
1
o
onde usamos a notação ‘=minuto e
“=segundo.
60.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
60
4.1.2 Circunferência Trigonométrica
Consideremos uma circunferência de
raio unitário (r=1), cujo centro coincide
com a origem de um sistema cartesiano
ortogonal:
Esta estrutura, juntamente com as
convenções a seguir, é chamada de
circunferência trigonométrica.
Convenções:
(I) O ponto A=(1,0) é a origem de
todos os arcos a serem medidos na
circunferência.
(II) Se um arco for medido no sentido
horário, então a essa medida será
atribuído o sinal negativo (-).
(III) Se um arco for medido no sentido
anti-horário, então a essa medida
será atribuído o sinal positivo (+).
(IV) Os eixos coordenados dividem o
plano cartesiano em quatro regiões
chamadas quadrantes; esses
quadrantes são contados no sentido
anti-horário, a partir do ponto A.
Como a circunferência tem 360º ou 2π
rad, cada um desses arcos medem 90º
ou π/2 rad.
OBS: Se temos um arco de origem A e
extremidade E, ele pode assumir
infinitos valores, dependendo do
número de voltas que sejam dadas para
medi-lo, tanto no sentido anti-horário
(+) quanto no sentido horário (-).
Usaremos a circunferência
trigonométrica para definir as funções
trigonométricas, mais adiante. Por agora
vamos trabalhar apenas com um
triângulo retângulo.
TRIGONOMETRIA NO TRIÂNGULO
RETÂNGULO
4.2 Razões Trigonométricas
O triângulo é retângulo quando um de
seus ângulos internos é reto (ângulo
reto= 90°).
Observe o triângulo retângulo ABC da
figura abaixo. Note os seus ângulos
agudos 𝛼 e 𝛽. (Ângulo agudo é todo
ângulo menor que 90°).
61.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
61
É importante saber que:
a) Em relação ao ângulo 𝛼: c é cateto
oposto (CO); b é cateto adjacente (CA).
b) Em relação ao ângulo 𝛽: b é CO; c é
CA.
c) O lado do triângulo oposto ao ângulo
reto é chamado de hipotenusa (HIP) do
triângulo retângulo.
São definidas as seguintes
razões: (onde está escrito sinlê-se
seno; onde está escrito cos lê-se
cosseno; onde está escrito tan lê-se
tangente):
HIP
CA
cos
HIP
CO
sin
CA
CO
tan
onde „oposto‟ e „adjacente‟ referem-se
ao ângulo .
4.3 Relações Métricas
Para um triângulo retângulo ABC,
podemos estabelecer algumas relações
entre as medidas de seus elementos:
- O quadrado de um cateto é igual ao
produto da hipotenusa pela projeção
desse cateto sobre a hipotenusa:
n
a
b
2
e m
a
c
2
- O produto dos catetos é igual ao
produto da hipotenusa pela altura
relativa à hipotenusa:
h
a
c
b
62.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
62
- O quadrado da altura é igual ao
produto das projeções dos catetos sobre
a hipotenusa:
n
m
h
2
- O quadrado da hipotenusa é igual a
soma dos quadrados dos catetos:
2
2
2
c
b
a
Essa relação é conhecida pelo nome de
Teorema de Pitágoras.
4.4 A generalização das razões
trigonométricas
Como vimos anteriormente, as razões
trigonométricas seno (sin), cosseno
(cos) e tangente (tan), referem-se a
ângulos agudos de um triângulo
retângulo. No entanto pode-se estender
a definição destas razões a ângulos
obtusos (obtuso é todo ângulo maior
que 90o
), conforme veremos a seguir.
Vamos definir novamente as razões
trigonométricas, agora nos quadrantes
trigonométricos.
Extensão do seno de um ângulo:
Traçamos um sistema de coordenadas
cartesianas e um ângulo (Figura
abaixo). Tomamos um ponto P de
coordenadas (a,b) e designamos de r a
distância do ponto P à origem do
sistema de coordenadas.
Relembrando, chamamos de sin 𝛼 à
razão entre o CO a cujo tamanho é
dado pela própria ordenada b do ponto
P, e a HIP, cujo tamanho é a própria
distância r; isto é:
r
b
sin
Com isso a extensão é feita de modo
que o sinal do seno dependerá do sinal
da ordenada do ponto, ou seja, do
quadrante a que pertença o ângulo. Será
positivo para o primeiro e o segundo
quadrantes (ordenadas positivas), e
negativo para o terceiro e o quarto
quadrantes (ordenadas negativas).
Extensão do cosseno de um ângulo:
Conforme definimos para o triângulo
retângulo, a razão entre o CA a , a
abscissa a do ponto P usado
anteriormente, e a HIP, distância r, será
o cosseno do ângulo :
63.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
63
r
a
cos
O sinal do cosseno de um ângulo
depende do sinal da abscissa do ponto.
Sendo assim o cos será positivo no
primeiro e no quarto quadrantes e
negativo nos segundo e no terceiro
quadrantes.
Se tomarmos a circunferência
trigonométrica (raio unitário e centro
coincidente com a origem de um
sistema cartesiano ortogonal) as razões
trigonométricas estarão definidas sobre
os próprios eixos, ou seja, o eixo x
corresponderá ao próprio cosseno do
ângulo contado no sentido anti-horário a
partir de 0x e um ponto P sobre a
circunferência, enquanto que o eixo y
corresponderá ao seno do mesmo
ângulo. Veja isso na figura e nas
relações que seguem a mesma:
x
x
y
y
1
cos
1
sin
Extensão da tangente de um ângulo:
A tangente de um ângulo, conforme
vimos em nosso estudo do triângulo
retângulo, é a razão entre o CO e o CA.
No caso do ponto P usado para estender
a definição do seno de um ângulo
teremos:
a
b
tan
O sinal da tangente dependerá do sinal
das coordenadas do ponto P escolhido.
Será positiva se as coordenadas forem
do mesmo sinal e negativa se forem de
sinais contrários.
Notar que podemos estender a definição
de tangente somente conhecendo as
extensões das definições de seno e
cosseno. Para isso basta que vejamos a
seguinte relação entre estas razões
trigonométricas:
cos
sin
tan
tan
HIP
CA
HIP
CO
CA
HIP
HIP
CO
HIP
HIP
CA
CO
64.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
64
Conforme pode-se notar nas duas
extensões sugeridas para tangente,
quando o denominador da fração for
nulo a tangente não está definida. Isso
ocorre quando a abscissa do ponto P é
nula, ou equivalentemente, o ângulo
vale 90o
. (Pois cos 90o
=0).
4.4 Fórmulas da soma e da diferença
de dois arcos
Seno da soma de dois arcos
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
Demonstração:
Seja a seguinte figura (circunferência
trigonométrica):
Inicialmente temos de notar que:
UV
OU
b
a
)
sin(
O triângulo ONR fornece as seguintes
relações:
OR
OR
b
NR
NR
b
1
cos
1
sin
Por outro lado, o triângulo OUR nos diz
que:
b
a
OU
b
OU
OR
OU
a cos
sin
cos
sin
Por sua vez, o triângulo NRS fornece:
b
a
NS
b
NS
NR
NS
a sin
cos
sin
cos
Notando que:
NS=UV
obtemos finalmente:
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
como queríamos demonstrar.
Embora tenhamos demonstrado a
igualdade acima apenas para o primeiro
quadrante, o resultado é válido para
qualquer destes. A demonstração para
os outros quadrantes é análoga,
fazendo-se as devidas correções de
sinais. Apenas a critério de exemplo
65.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
65
faremos mais uma demonstração, a do
segundo quadrante.
Seja a nova figura:
Novamente notamos que:
UV
OV
b
a
)
sin(
Definimos o ângulo auxiliar
o
a 90
O triângulo ORN fornece as relações:
b
OR
OR
b
b
NR
NR
b
cos
1
cos
sin
1
sin
O triângulo NRS fornece:
UV
b
RS
NR
RS
sin
sin
sin
Por sua vez, o triângulo OVR fornece:
b
OV
OR
OV
cos
cos
cos
Temos então como resultado parcial:
b
b
b
a sin
sin
cos
cos
)
sin(
Mas, observando o seguinte desenho:
Notamos que:
sin
)
90
cos(
cos
)
90
sin(
o
o
Então, ocorre que:
a
a
sin
cos
cos
sin
Substituindo no resultado parcial
obtemos a relação desejada:
b
a
b
a
b
a cos
cos
cos
sin
)
sin(
o que conclui a demonstração para um
ângulo no segundo quadrante.
66.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
66
Seno da diferença de dois arcos
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
Demonstração:
Podemos reescrever o seno da diferença
como:
)]
(
sin[
)
sin( b
a
b
a
e aplicar a fórmula da soma, obtendo:
a
b
b
a
b
a cos
)
sin(
)
cos(
sin
)
sin(
Uma vez notando que o cosseno de um
ângulo corresponde à abscissa do
sistema cartesiano que contém a
circunferência trigonométrica, é fácil
ver que:
b
b cos
)
cos(
e que:
b
b sin
)
sin(
Com esses resultados estabelece-se a
igualdade requerida:
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
completando a demonstração.
Cosseno da soma de dois arcos
b
a
b
a
b
a sin
sin
cos
cos
)
cos(
Demonstração:
Para demonstrar este resultado devemos
notar as seguintes igualdades:
c
c
c
c
c
c
c
c
c
c
o
o
o
o
o
o
o
o
sin
)
180
sin(
cos
180
sin
180
cos
sin
)
180
sin(
cos
)
90
sin(
cos
90
sin
90
cos
sin
)
90
sin(
uma vez que cosseno de 90o
é nulo e o
seno deste ângulo é igual a 1 e cosseno
de 180o
é -1 e seno deste ângulo é nulo.
(Ver as figuras que estendem as
definições de senos e cossenos para
quaisquer ângulos, notando as
coordenadas das interseções da
circunferência trigonométrica com os
eixos coordenados).
Sendo assim, temos:
67.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
67
a
b
b
a
b
a
a
b
b
a
a
b
b
a
b
a
b
a
o
o
o
o
o
sin
sin
cos
cos
)
cos(
)
90
90
sin(
sin
cos
cos
)
90
cos(
sin
cos
)
90
sin(
)
90
sin(
)
cos(
conforme desejávamos.
Cosseno da diferença de dois arcos
b
a
b
a
b
a sin
sin
cos
cos
)
cos(
Demonstração:
Reescrevemos o cosseno desejado
como:
))
(
cos(
)
cos( b
a
b
a
e usamos a fórmula da soma de
cossenos:
b
a
b
a
b
a
b
a
b
a
b
a
b
a
b
a
sin
sin
cos
cos
)
cos(
)
sin
(
sin
cos
cos
)
sin(
sin
)
cos(
cos
)
cos(
o que conclui a demonstração.
Tangente da soma ou da diferença de
dois arcos
b
a
b
a
b
a
tan
tan
1
tan
tan
tan
onde deve-se usar somente o sinal
superior ou somente o inferior.
Demonstração:
Usamos os resultados obtidos para seno
e cosseno da soma de dois arcos:
b
a
b
a
b
a
b
a
b
a
b
b
b
a
b
b
b
a
a
a
b
a
b
a
a
b
b
a
b
a
b
a
b
a
tan
tan
1
tan
tan
)
tan(
tan
tan
1
tan
tan
cos
cos
sin
tan
cos
sin
cos
tan
cos
cos
sin
sin
cos
cos
cos
sin
cos
sin
)
cos(
)
sin(
)
tan(
como queríamos demonstrar.
4.5 Fórmulas de arcos duplos
Chama-se de arco duplo à soma de dois
arcos iguais. Sendo assim, para
escrevermos as fórmulas de arcos
duplos basta igualar os dois arcos e
obter as expressões correspondentes.
Chamaremos este arco que se repete
duas vezes de x ao invés de a ou b.
O seno de um arco duplo
Temos neste caso:
x
x
x
x
x
x
x
cos
sin
cos
sin
)
sin(
2
sin
68.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
68
Então:
x
x
x cos
sin
2
2
sin
O cosseno de um arco duplo
Neste caso temos:
x
x
x
x
x
x
x
sin
sin
cos
cos
)
cos(
2
cos
ou seja:
x
x
x 2
2
sin
cos
2
cos
Notando que, pelo teorema de Pitágoras
e por ser o raio de uma circunferência
trigonométrica igual a 1, temos a
identidade fundamental:
1
sin
cos 2
2
x
x
Esta identidade permite reescrever a
fórmula para o cosseno do arco duplo
de duas outras maneiras equivalentes:
x
x
x
x
2
2
sin
2
1
2
cos
1
cos
2
2
cos
A tangente de um arco duplo
Temos, neste caso:
x
x
x
x
x
x
x
tan
tan
1
tan
tan
)
tan(
2
tan
ou seja,
x
x
x 2
tan
1
tan
2
2
tan
4.6 Lei dos Cossenos
Pode-se estabelecer as seguintes
relações entre ângulos e lados de um
triângulo qualquer:
cos
2
cos
2
cos
2
2
2
2
2
2
2
2
2
2
ab
b
a
c
ac
c
a
b
bc
c
b
a
onde a,b e c, e estão representados
na figura abaixo:
4.7 As razões recíprocas
Além das razões trigonométricas seno,
cosseno e tangente, podemos definir os
recíprocos destas frações. Chamaremos
de secante (sec) ao recíproco do
cosseno, cossecante (cossec) ao
recíproco do seno, e finalmente
cotangente (cot) ao recíproco da
tangente, ou seja:
69.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
69
tan
1
cot
sin
1
sec
cos
cos
1
sec
Pode-se trabalhar com somas e
diferenças de arcos para estas razões
utilizando os resultados que já
conhecemos para as funções seno,
cosseno e tangente.
4.8 Representação gráfica das razões
trigonométricas e suas recíprocas
Para finalizar esta seção apresentaremos
os gráficos das razões trigonométricas e
de suas recíprocas.
Para seno, cosseno e tangente, temos:
Já para secante, cossecante e cotangente
temos:
E por último apresentamos cada uma
das razões trigonométricas, bem como
suas recíprocas, na circunferência
trigonométrica, para facilitar
memorização e visualização de relações
entre elas (às vezes uma visão
geométrica é mais fácil de ver que uma
analítica!). Também uma tabela com
valores de seno, cosseno e tangente de
alguns ângulos.
OS
OT
BS
AT
OQ
OP
sec
cos
sec
cot
tan
cos
sin
70.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
70
(Figura extraída de KÜHLKAMP, Nilo.
Cálculo 1, 2ed., Editora da UFSC,
2001, p.57)
sin cos tan
30o
2
1
2
3
3
3
45o
2
2
2
2 1
60o
2
3
2
1 3
Exercícios Propostos
1. Calcular os catetos de um triângulo
retângulo cuja hipotenusa mede 6
cm e um dos ângulos mede 60º.
2. Quando o ângulo de elevação do sol
é de 65 º, a sombra de um edifício
mede 18 m. Calcule a altura do
edifício. (sen 65º = 0,9063, cos 65º
= 0,4226 e tg 65º = 2,1445)
3. Quando o ângulo de elevação do sol
é de 60º, a sombra de uma árvore
mede 15m. Calcule a altura da
árvore, considerando 7
,
1
3 .
4. Uma escada encostada em um
edifício tem seus pés afastados a 50
m do edifício, formando assim, com
o plano horizontal, um ângulo de
32º. A altura do edifício é
71.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
71
aproximadamente: (sen 32º = 05299,
cos 32 º = 0,8480 e tg 32º = 0,6249)
5. Um avião levanta vôo sob um
ângulo de 30º. Depois de percorrer 8
km, o avião se encontra a uma altura
de:
6. Um foguete é lançado sob um
ângulo de 30 º. A que altura se
encontra depois de percorrer 12 km
em linha reta?
7. Do alto de um farol, cuja altura é de
20 m, avista-se um navio sob um
ângulo de depressão de 30º. A que
distância, aproximadamente, o navio
se acha do farol? (Use √3 = 1,73)
8. Se cada ângulo de um triângulo
eqüilátero mede 60 º, calcule a
medida da altura de um triângulo
eqüilátero de lado 20 cm.
9. Um alpinista deseja calcular a altura
de uma encosta que vai escalar. Para
isso, afasta-se, horizontalmente, 80
m do pé da encosta e visualiza o
topo sob um ângulo de 55º com o
plano horizontal. Calcule a altura da
encosta. (Dados: sen(55º) = 0,81,
cos (55º) = 0,57 e tg (55º) = 1,42.
10. Calcule o valor de y em cada figura:
11. Encontre x e y nas figuras:
12. Patrik, um jovem curioso, observa
da janela do seu quarto (A) uma
banca de revistas (R), bem em frente
ao seu prédio, segundo um ângulo
de 60° com a vertical. Desejando
avaliar a distância do prédio à
banca, Patrik sobe seis andares
(aproximadamente 16 metros) até o
apartamento de um amigo seu, e
passa a avistar a banca (do ponto B)
segundo um ângulo de 30° com a
72.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
72
vertical. Calculando a distância “d”,
Patrik deve encontrar,
aproximadamente, o valor:
13. Um topógrafo foi chamado para
obter a altura de um edifício. Para
fazer isto, ele colocou um teodolito
(instrumento para medir ângulos) a
200 m do edifício e mediu o ângulo
de 30°, como indicado na figura a
seguir. Determine a altura do
edifício.
14. Determine o valor da expressão: y
= 4cos105°
15. Sabendo-se que sen(x) = 5
3
e que x
pertence ao primeiro quadrante,
determine sen(2x).
16. Se tg (x + y) = 2 e tg (y) = 1,
determine tg (x).
17. Sabendo que
a
a
a sin
5
2
cos
sin
Determine o valor de a
2
sin .
18) Determine o valor de cos(105°).
19) Simplifique a expressão:
x
x
x
x
y
sin
sec
cos
cos
sec
73.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
73
Respostas do Módulo 4
1) 3
3 e 3
********************************
2) 38,6 m
********************************
3) 26 m
********************************
4) 31,24 m
********************************
5) 4 Km
********************************
6) 6 Km
********************************
7) 34,6 m
********************************
8) 3
10
********************************
74.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
74
9) 114,2 m
********************************
10) a) y = 6 b) 3
8
********************************
11) a) x = 9 e y = 18
b)x = 3
4 e y = 3
8
********************************
12) 9,24 m
********************************
13)
3
3
200 m
********************************
14) 6
2
********************************
15)
25
24
********************************
16)
3
1
********************************
17)
17
15
********************************
18)
4
6
2
********************************
19)
x
tg3
********************************
75.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
75
Módulo 5: Vetores
Introdução
A Física lida com um amplo
conjunto de grandezas. Dentro dessa
gama enorme de grandezas existem
algumas, cuja caracterização completa
requer somente um número seguido de
uma unidade de medida apropriada.
Tais grandezas são chamadas
grandezas escalares. Exemplos dessas
grandezas são a massa e a temperatura.
Uma vez especificado que a massa é 1
kg ou a temperatura é 32ºC, não
precisamos de mais nada para
caracterizá-las. Comprimento, área,
volume, pressão e tempo são outros
exemplos de grandezas escalares.
Na Física, contudo, há muitas
grandezas para as quais, além do valor
numérico, devem necessariamente, se
fazer presentes duas outras informações
igualmente relevantes: a direção e o
sentido. Grandezas físicas com esse
perfil são chamadas de grandezas
vetoriais. Exemplo: a posição de um
objeto. Não basta dizer que um objeto
76.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
76
está a 200 metros. Se você disser que o
objeto está a 200 metros, existem
muitas possíveis localizações desse
objeto (para cima, para baixo, para os
lados,...).
Dizer que um objeto está a 200
metros é necessário, porém não é
suficiente. A distância (200 m) é o que
denominamos de módulo da grandeza.
Para localizar o objeto, é preciso
especificar também a direção e o
sentido em que ele se encontra.
Outro exemplo de grandeza
vetorial é a força. Ao se dizer que um
caixote foi empurrado por uma força de
50 Newtons (admita que Newton é uma
unidade de força), não se estará sendo
de todo claro. Afinal, para onde foi
empurrado o caixote (isto é, em que
direção)? Se ao longo de um plano
inclinado, para cima ou para baixo (em
que sentido)? Veja que, juntamente com
o número e a respectiva unidade, é
necessário explicitar a direção e o
sentido da força aplicada para que esta
fique bem definida. Deslocamento,
velocidade, aceleração e quantidade de
movimento são, também, grandezas
vetoriais.
5.1 Vetores e escalares
Lidar com grandezas escalares é
fácil. Fazer adição de duas grandezas
escalares é simples. Por exemplo,
3 kg + 2 kg = 5 kg. Trabalhar com
grandezas vetoriais já não é tão simples.
Somar grandezas vetoriais, bem
como realizar as demais operações
(subtração, multiplicação,...), é
fundamental em Física. Se aplicarmos
duas forças a um corpo, qual será o
resultado da adição dessas duas forças?
Certamente, não podemos simplesmente
somar os módulos.
A melhor forma de se lidar com
grandezas vetoriais é introduzindo um
ente matemático conhecido como vetor.
O vetor representa o módulo, a direção
e o sentido das grandezas físicas
vetoriais.
5.2 Representação e Características
de um Vetor
Para a representação gráfica de um
vetor, considere, inicialmente, o
segmento de reta B
A sobre a reta r da
Figura 5.1. Orientando-se este segmento
por meio de uma seta colocada no ponto
B (ou no ponto A), obtém-se a
representação gráfica de um vetor
(Figura 5.2), que pode ser escrito por
meio de uma letra maiúscula ou
minúscula com uma pequena flecha
sobre ela.
77.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
77
Na Figura 5.2, o ponto A é a origem do
vetor v e o ponto B a sua extremidade.
A reta r é a reta suporte do vetor v .
Normalmente, quando se representa um
vetor, omite-se a sua reta suporte.
Figura 5.1
Figura 5.2
Um vetor fica especificado por suas três
características: módulo, direção e
sentido.
O módulo de um vetor, dado por
um número seguido de uma
unidade, está associado ao
tamanho do vetor, ou seja,
especifica a intensidade da
grandeza que ele representa (50
Newtons, 20m/s, etc.).
Simbolicamente, o módulo de
um vetor v é escrito como v
ou, simplesmente, v.
A direção de um vetor é a da sua
reta suporte, ou, a inclinação do
vetor em relação a um
determinado eixo.
O sentido coincide com o da
orientação do segmento de reta
orientado (para onde aponta o
vetor).
Para cada direção (Figura 5.3) existem
dois sentidos (Figura 5.4):
Os vetores 𝑎, 𝑏 e 𝑐 da Figura 5.5 têm
como característica comum o mesmo
módulo (aqui foi tomada uma escala na
qual o comprimento representa a
unidade).
Os vetores 𝑑 e 𝑓 da Figura 5.6 têm as
três características iguais: mesmo
módulo, mesma direção e mesmo
sentido. Neste caso, diz-se que os
vetores são iguais, isto é, 𝑑 = 𝑓.
direção
Figura 5.3
sentido
Figura 5.4
78.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
78
Já o vetor 𝑒 tem o mesmo módulo e a
mesma direção que 𝑑 e 𝑓, porém
sentido contrário a eles. Pode-se
relacioná-los escrevendo: 𝑓 = 𝑑 = -𝑒.
5.3 Adição e Subtração de Vetores
pelo Método Geométrico
5.3.1 Método do Polígono
Considere os vetores 𝑣1 e 𝑣2 da Figura
5.7. A soma de 𝑣1 com 𝑣2 pode ser
efetuada da seguinte maneira: fixa-se 𝑣1
e desloca-se 𝑣2 (mantendo-se
inalteradas as suas características, isto é,
seu módulo, direção e sentido), de modo
que a origem de 𝑣2 coincida com a
extremidade de 𝑣1 (Figura 5.8). O vetor
que tem por origem a origem de 𝑣1 e
por extremidade a extremidade de 𝑣2 é
o vetor soma de 𝑣1 com 𝑣2, 𝑣1 + 𝑣2,
como é visto na Figura 5.9. Pode-se
observar, através de uma simples
inspeção visual, que a soma dos
comprimentos de 𝑣1 e 𝑣2 é diferente do
comprimento do vetor 𝑣1 + 𝑣2.
A regra do polígono pode ser usada na
adição de um número qualquer de
vetores.
5.3.2 Método do Paralelogramo
A soma de 𝑣1 com 𝑣2 também pode ser
obtida desenhando-se os vetores com a
mesma origem. O vetor resultante,
𝑣1 + 𝑣2, é o vetor correspondente à
diagonal do paralelogramo que tem por
lados os vetores 𝑣1 e 𝑣2 (Figura 5.10).
Figura 5.6
a = b = c = 3 unidades
𝑎 ≠ 𝑏 ≠ 𝑐
Figura 5.5
f= d = e = 4 unidades
𝑓 ≠ 𝑑 ≠ - 𝑒
Figura 5.7 Figura 5.8
Figura 5.10
Figura 5.9
79.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
79
A regra do paralelogramo é aplicada
somente à adição de dois vetores.
Considere, por exemplo, a soma dos
vetores 𝐴 , 𝐵 , 𝐶 , 𝐷 e 𝐸 da Figura 5.11.
O vetor resultante 𝐴 + 𝐵 + 𝐶 + 𝐷 +
𝐸 pode ser obtido da seguinte maneira:
fixa-se o vetor 𝐴 ; desloca-se
paralelamente o vetor 𝐵 de modo tal
que a sua origem coincida com a
extremidade de 𝐴 ; desloca-se, da
mesma maneira, o vetor 𝐶 tal que a sua
origem coincida com a extremidade de
𝐵 e, assim, sucessivamente. O vetor
soma tem, por origem, a origem do
primeiro vetor (𝐴 ) e por extremidade, a
extremidade do último vetor (𝐸 )
(Figura 5.12).
Propriedades importantes da adição
vetorial:
a) Propriedade comutativa vetorial, que
estabelece 𝑎 + 𝑏 = 𝑏 + 𝑎
Figura 5.13
b) Propriedade associativa vetorial, que
estabelece 𝑑 + (𝑒 + 𝑓) = (𝑑 + 𝑒) + 𝑓
Considere agora, os vetores 𝐴 e 𝐵 da
Figura 5.15. Para se obter
geometricamente o vetor 𝐴 - 𝐵 ,
transforma-se a diferença em uma soma,
já que 𝐴 - 𝐵 = 𝐴 + (- 𝐵). O vetor -𝐵
tem mesmo módulo, mesma direção,
mas sentido oposto ao do vetor 𝐵
(Figura 5.16). Desta forma, recai-se na
Figura 5.11
Figura 5.12
𝑎 + 𝑏
𝑎
𝑏
𝑎
𝑏
𝑏 + 𝑎
𝑑 +
𝑒 +
𝑓
𝑓
𝑒
𝑑
𝑑
+
𝑒
𝑒
+
𝑓
Figura 5.14
80.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
80
soma dos vetores 𝐴 𝑒 -𝐵 , como pode
ser visto na Figura 5.17.
5.4 Adição e subtração de vetores de
mesma direção pelo método analítico
Antes de se efetuar a soma e subtração
analítica de vetores de mesma direção, é
conveniente definir o que se entende por
vetor unitário.
Um vetor é dito unitário quando o seu
módulo é igual à unidade. O vetor
unitário que tem a direção do eixo x e o
sentido de x‟ para x (Figura 5.18) é o
vetor 𝑖.
Figura 5.18
Considere, a seguir, a soma geométrica
de dois vetores unitários 𝑖 (Figura 5.19).
Veja por esta figura, que o vetor
resultante 𝑖 + 𝑖 tem mesma direção e
sentido que o vetor 𝑖 e módulo duas
vezes maior. Este vetor é, portanto, o
vetor 2𝑖.
Figura 5.19
Assim, por exemplo, o vetor 𝐴 = 7𝑖 tem
mesma direção e sentido que o vetor 𝑖 e
módulo sete vezes maior. Já o vetor 𝐵 =
-4𝑖 tem a mesma direção do vetor 𝑖,
sentido oposto e módulo quatro vezes
maior.
a) Soma de vetores de mesma direção e
sentido:
Seja 𝐶 = 2𝑖, 𝐷 = 6𝑖 e 𝑅 o vetor
resultante da soma dos vetores 𝐶 e 𝐷.
Soma Analítica:
Figura 5.15
Figura 5.16
Figura 5.17
81.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
81
Soma Geométrica:
b) Soma de vetores de mesma direção e
sentidos opostos:
Seja 𝐸 = 3𝑖, 𝐹 = -5𝑖 e 𝑅 o vetor
resultante da soma dos vetores 𝐸 e 𝐹.
SomaAnalítica:
Soma Geométrica:
Para vetores na direção y, pode-
se realizar operações de adição e
subtração de vetores utilizando-se um
procedimento inteiramente análogo ao
que se adotou para a direção x. É
necessário que se defina um vetor
unitário na direção y. O vetor unitário
que tem a direção do eixo y e o sentido
de y‟ para y (Figura 5.22) é o vetor 𝑗.
Figura 5.22
O vetor resultante da subtração dos
vetores 𝐴 = 12𝑗 e 𝐵 = 5𝑗, 𝑅 = 𝐴 - 𝐵, tem
mesma direção e sentido que o vetor 𝑗 e
módulo sete vezes maior (𝑅 = 7𝑗).
5.5 Componentes de um vetor
Considere o sistema de eixos
cartesianos xy. Seja 𝒂𝒙 um vetor na
direção x e 𝒂𝒚 um vetor na direção y
(Figura 5.23). Da soma geométrica
destes dois vetores resulta o vetor 𝒂
(Figura 5.24).
𝑅 = 𝐶 + 𝐷
𝑅 = 2𝑖 + 6𝑖
𝑅 = (2 + 6) 𝑖
𝑅 = 8 𝑖
𝑅 = 𝐸 + 𝐹
𝑅 = 3𝑖 - 5𝑖
𝑅 = (3 -5) 𝑖
𝑅 = -2 𝑖
Figura 5.20
Figura 5.21
82.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
82
𝒂 = 𝒂𝒙 + 𝒂𝒚
(1)
Os vetores 𝑎𝑥 e 𝑎𝑦 são denominados,
respectivamente, vetores componentes
do vetor 𝑎 nas direções x e y. Estes
vetores podem ser escritos em termos
dos vetores unitários 𝑖 e 𝑗. Assim:
𝑎𝑥 = 𝑎𝑥𝑖 e 𝑎𝑦 = 𝑎𝑦 𝑗 (2)
Substituindo-se as relações (2) em (1),
obtém-se:
𝑎 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 (3)
O escalar 𝑎𝑥 é a componente de 𝑎 na
direção x. Da mesma forma, 𝑎𝑦 é a
componente de 𝑎 na direção y. As
componentes 𝑎𝑥 e 𝑎𝑦 podem ser escritas
em termos do módulo do vetor 𝑎 e do
ângulo que 𝑎 faz, por exemplo, com o
semi-eixo positivo OX. Sendo θ este
ângulo e a o módulo do vetor 𝑎, obtém-
se, através do triângulo retângulo que
tem por lados a, 𝑎𝑥 e 𝑎𝑦 (Figura 5.25),
que:
cos 𝜃 =
𝑎𝑥
𝑎
→ 𝑎𝑥= 𝑎 cos 𝜃
e sen 𝜃 =
𝑎𝑦
𝑎
→ 𝑎𝑦 = 𝑎 sen 𝜃 (4)
Substituindo-se na equação (3) os
valores encontrados para 𝑎𝑥 e 𝑎𝑦,
respectivamente, nas equações (4),
obtém-se:
𝑎 = 𝑎 cos 𝜃 𝑖 + 𝑎 sin 𝜃 𝑗 (5)
Pelo teorema de Pitágoras, o módulo do
vetor 𝑎 é dado por:
𝑎 = 𝑎 = 𝑎𝑥
2 + 𝑎𝑦
2 (6)
Exemplo 1: O vetor 𝑎, mostrado na
Figura 5.26, tem módulo igual a 5 cm e
faz um ângulo de 120º com o semi-eixo
positivo OX. Determine as suas
componentes nas direções x e y.
Figura 5.23
Figura 5.24
Figura 5.25
83.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
83
Figura 5.26
Resolução:
Projetando-se o vetor 𝑎 nos eixos x e y,
pode-se observar que 𝑎𝑥𝑖 é um vetor
com sentido oposto ao do vetor 𝑖
(Figura 5.27), portanto a componente 𝑎𝑥
é negativa. Já o vetor 𝑎𝑦 𝑗 tem sentido
igual ao vetor 𝑗 e 𝑎𝑦 é positivo. Usando-
se as equações (4), tem-se que:
𝑎𝑥 = 5 cos 120º = 5 (−1 2) = -2,50
cm
𝑎𝑦 = 5 sin 120º = 5 (0,866) = 4,33
cm
A partir do triângulo retângulo com
lados 5 cm, 𝑎𝑥 e 𝑎𝑦 (Figura 5.28), e
observando o sentido dos vetores 𝑎𝑥 e
𝑎𝑦 , pode-se igualmente obter as
componentes de 𝑎.
Neste caso,
𝑎𝑥 = −5 cos 60º = −5 (1 2) = -2,50
cm
𝑎𝑦 = 5 sin 60º = 5 (0,866) = 4,33 cm
Figura 5.27
Figura 5.28
5.6 Adição e Subtração Analítica de
Vetores
A adição/subtração de vetores no plano
xy é feita somando-se/subtraindo-se as
componentes destes vetores em cada
uma das duas direções.
Sendo 𝑎 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 e 𝑏 = 𝑏𝑥𝑖 +
𝑏𝑦 𝑗, obtém-se o vetor 𝑐 = 𝑎 + 𝑏 da
seguinte maneira:
𝑐 = 𝑎 + 𝑏 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑏𝑥𝑖 + 𝑏𝑦 𝑗
𝑐 = (𝑎𝑥 + 𝑏𝑥 )𝑖 + (𝑎𝑦 + 𝑏𝑦 ) 𝑗
(𝑎𝑥 + 𝑏𝑥 ) e (𝑎𝑦 + 𝑏𝑦) são,
respectivamente, as componentes do
vetor 𝑐 nas direções x e y.
Exemplo 2: Sendo A = 3𝑖, 𝐵 =
5𝑗 𝑒 𝐶 = 4𝑖 + 6𝑗, obtenha os vetores 𝑅
84.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
84
= 𝐴 + 𝐵, 𝑆 = 𝐴 - 𝐵 e 𝑉 = 𝐴 + 𝐶,
analítica e geometricamente:
Resolução:
Figura 5.30
Figura 5.31
Figura 5.32
5.7 Vetores em três dimensões
Até agora, trabalhou-se com vetores em
uma e duas dimensões. A situação que
envolve vetores no espaço
tridimensional é, contudo, a mais geral.
Portanto, considere o sistema de eixos
cartesianos xyz. Para se obter a
expressão analítica de um vetor neste
sistema de eixos, é necessário introduzir
um vetor unitário na direção z, que vai
desempenhar, nesta direção, papel
análogo ao dos vetores 𝑖 e 𝑗 nas direções
x e y. O vetor unitário que tem a direção
do eixo z e o sentido de z‟ para z é o
vetor 𝑘 (Figura 5.35).
Figura 5.35
Seja 𝑎𝑥 um vetor na direção x, 𝑎𝑦 um
vetor na direção y e 𝑎𝑧 um vetor na
direção z. Da soma geométrica destes
três vetores (Figura 5.36), resulta o
vetor 𝑎:
𝑎 = 𝑎𝑥 + 𝑎𝑦 + 𝑎𝑧 (7)
𝑅 = 𝐴 + 𝐵,
𝑅 = 3𝑖 + 5𝑗.
𝑆 = 𝐴 - 𝐵,
𝑆 = 3𝑖 - 5𝑗.
𝑉 = 𝐴 + 𝐶,
𝑉 = 3𝑖 + 4𝑖 + 6𝑗,
𝑉 = 7𝑖 + 6𝑗.
85.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
85
O módulo de 𝑎 é igual à diagonal do
paralelepípedo de lados iguais aos
módulos das componentes 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧.
Os vetores 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧 são
denominados, respectivamente, vetores
componentes do vetor 𝑎 nas direções x,
y e z. Estes vetores podem ser escritos
como:
𝑎𝑥 = 𝑎𝑥𝑖; 𝑎𝑦 = 𝑎𝑦 𝑗 e 𝑎𝑧 = 𝑎𝑧𝑘 (8)
Substituindo (8) em (7), obtém-se:
𝑎 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧𝑘 (9)
A relação (9) é a expressão geral de um
vetor no espaço tridimensional, escrita
em termos de suas componentes e dos
respectivos vetores unitários.
No 𝑅3
é possível sabermos o módulo de
um vetor se soubermos o valor das suas
componentes, utilizando a seguinte
relação:
𝑎 = 𝑎𝑥
2 + 𝑎𝑦
2 + 𝑎𝑧
2
(10)
Exemplo 3: Represente, em um
diagrama xyz, o vetor 𝐹 = 2𝑖 + 4𝑗 −
5𝑘.
Resolução:
A Figura 5.37 mostra o vetor 𝐹
construído conforme os seus vetores
componentes, e que pode ser melhor
visualizado a partir de um
paralelepípedo.
Figura 5.37
5.8 Produto Envolvendo Vetores
Além da soma e subtração de vetores,
há mais duas operações envolvendo
vetores que serão estudadas a seguir,
face à sua importância para a Física: o
produto escalar e o produto vetorial.
5.8.1 Produto Escalar
Figura 5.36
86.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
86
O produto escalar entre dois vetores 𝑎 e
𝑏, representado por 𝑎. 𝑏 (lê-se 𝑎 escalar
𝑏) é definido como o produto do
módulo de 𝑎 pelo módulo de 𝑏 pelo
cosseno do ângulo formado pelos
vetores 𝑎 e 𝑏, ou seja:
𝑎. 𝑏 = 𝑎𝑏 cos 𝜃 (11)
Figura 5.38
Note que o produto escalar tem como
resultado uma grandeza escalar (um
número).
Propriedades do Produto Escalar:
1) 𝑎. 𝑏 = 𝑏. 𝑎
2) 𝑎 (𝑏 + 𝑐) = 𝑎. 𝑏 + 𝑎. 𝑐
3) (𝑛1𝑎) (𝑛2𝑏) = (𝑛1 𝑛2) (𝑎. 𝑏)
Para um melhor entendimento da
definição (𝑎. 𝑏 = 𝑎𝑏 cos 𝜃) do produto
escalar, considere as seguintes
situações:
O produto escalar de dois vetores
perpendiculares é zero, pois θ = 90º e
cos 90º = 0.
Da mesma forma:
𝑖. 𝑗 = 0 𝑗. 𝑘 = 0 𝑘. 𝑖 = 0
b)O produto escalar de dois vetores que
formam entre si um ângulo θ, tal que 0
≤ θ < 90º, é positivo.
Matematicamente o produto escalar fala do
alinmhamento entre os vetores.
𝐴. 𝐵 = (A cos 𝜃) B = AB cos 𝜃
Então, pode-se dizer também que o produto
escalar entre dois vetores 𝑎 e 𝑏 é igual ao
produto do módulo do vetor 𝑏 pela
componente do vetor 𝑎 na direção de 𝑏.
𝑎. 𝑏 = 0.
𝑎. 𝑏 = a b cos 90º
𝑎. 𝑏 > 0.
𝑎. 𝑏 = a b cos θ
87.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
87
c) O produto escalar de dois vetores que
formam entre si um ângulo θ, tal que
90º < θ ≤ 180º, é negativo.
d) O produto escalar de um vetor por
ele mesmo é igual ao módulo do vetor
ao quadrado, pois o ângulo entre vetores
de mesma direção e sentido é θ = 0º e
cos 0º = 1.
𝑎. 𝑎 = 𝑎 𝑎 cos 0º,
𝑎. 𝑎 = 𝑎2
(12)
De forma análoga:
𝑖. 𝑖 = 1 𝑗. 𝑗 = 1 𝑘. 𝑘 = 1
A definição do produto escalar entre
dois vetores envolve o módulo dos
vetores e o ângulo entre eles. Outra
maneira de expressar o produto escalar
de dois vetores é através das
componentes destes vetores.
Seja 𝑎 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧𝑘 e 𝑏 = 𝑏𝑥𝑖 +
𝑏𝑦 𝑗 + 𝑏𝑧𝑘.
Efetuando-se o produto 𝑎. 𝑏, obtém-se:
𝑎. 𝑏 = (𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧𝑘) . (𝑏𝑥𝑖 + 𝑏𝑦 𝑗
+ 𝑏𝑧𝑘)
𝑎. 𝑏 = 𝑎𝑥𝑖 . 𝑏𝑥𝑖 + 𝑎𝑥𝑖 . 𝑏𝑦 𝑗 + 𝑎𝑥𝑖 . 𝑏𝑧𝑘 +
𝑎𝑦 𝑗 . 𝑏𝑥𝑖 + 𝑎𝑦 𝑗 . 𝑏𝑦 𝑗 + 𝑎𝑦 𝑗 . 𝑏𝑧𝑘 +
𝑎𝑧𝑘 . 𝑏𝑥𝑖 + 𝑎𝑧𝑘 . 𝑏𝑦 𝑗 + 𝑎𝑧𝑘 . 𝑏𝑧𝑘,
𝑎. 𝑏 = 𝑎𝑥 𝑏𝑥 + 𝑎𝑦 𝑏𝑦 + 𝑎𝑧 𝑏𝑧.
(13)
Exemplo 4: Seja 𝑣1 = x𝑖 + 4𝑗 - 3𝑘 e 𝑣2
= 3𝑖 − 6𝑗 - 𝑘. Determine o valor de x
para que os vetores 𝑣1 e 𝑣2 sejam
perpendiculares.
Resolução:
O produto escalar entre dois vetores
perpendiculares é nulo. Logo 𝑣1.𝑣2 = 0.
Assim, usando a equação (13), resulta:
𝑣1.𝑣2 = 3x + (4) (-6) + (-3) (-1) = 0
3x – 24 + 3 = 0
3x = 21
x = 7.
As relações (12) e (13) permitem
calcular o módulo de um vetor. Fazendo
o produto escalar de um vetor 𝑎
qualquer por ele próprio e usando estas
relações, obtém-se:
𝑎. 𝑎 = 𝑎2
e 𝑎. 𝑎 = 𝑎𝑥 𝑎𝑥 + 𝑎𝑦 𝑎𝑦 + 𝑎𝑧
𝑎𝑧.
𝑎. 𝑎 = 𝑎𝑥
2
+ 𝑎𝑦
2
+ 𝑎𝑧
2
.
Assim,
𝑎2
= 𝑎𝑥
2
+ 𝑎𝑦
2
+ 𝑎𝑧
2
𝑎 = 𝑎𝑥
2 + 𝑎𝑦
2 + 𝑎𝑧
2
𝑎. 𝑏 = a b cos θ
𝑎. 𝑏 < 0.
(14)
88.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
88
O produto escalar pode também ser
utilizado para a obtenção do módulo do
vetor resultante da soma de dois
vetores.
Sejam dois vetores 𝑎 e 𝑏, de módulos
respectivamente iguais a a e b, que
formam entre si um ângulo θ e 𝑟 o vetor
resultante da soma destes vetores
(Figura 5.39).
Figura 5.39
Fazendo-se o produto escalar de 𝑟 = 𝑎 +
𝑏 por ele próprio, obtém-se:
𝑟. 𝑟 = (𝑎 + 𝑏) . ( 𝑎 + 𝑏)
𝑟. 𝑟 = 𝑎. 𝑎 + 𝑎. 𝑏 + 𝑏. 𝑎 + 𝑏. 𝑏
𝑟2
= 𝑎2
+ 𝑎 𝑏 cos 𝜃 + 𝑏 𝑎 cos 𝜃 + 𝑏2
,
r = 𝑎2 + 𝑏2 + 2 𝑎 𝑏 cos 𝜃
Casos particulares desta equação:
a) Quando os vetores são
perpendiculares (θ = 90º), o módulo
do vetor 𝑟 é igual à raiz quadrada da
soma dos quadrados dos módulos
dos vetores 𝑎 e 𝑏:
b) Se os vetores tiveram a mesma
direção e o mesmo sentido (θ = 0º), o
módulo do vetor 𝑟 é a soma dos
módulos dos vetores:
c) Para vetores de mesma direção e
sentidos opostos (θ = 180º), o
módulo do vetor 𝑟 é a diferença dos
módulos dos vetores 𝑎 e 𝑏:
Módulo do vetor 𝑎.
Módulo do vetor resultante
da soma de 𝑎 e 𝑏.
(15)
r = 𝑎2 + 𝑏2 + 2 𝑎 𝑏 cos 90º ,
r = 𝑎2 + 𝑏2
𝑟
𝑎 𝑏
r = 𝑎2 + 𝑏2 + 2 𝑎 𝑏 cos 0º ,
r = 𝑎2 + 𝑏2 + 2 𝑎 𝑏 ,
r = 𝑎 + 𝑏 2 = 𝑎 + 𝑏.
𝑎
b
−𝑏
𝑟
𝑏
𝑎
89.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
89
Há inúmeros exemplos de aplicação de
produto escalar em fenômenos físicos.
Seja o caso do trabalho (W) de uma
força (𝐹). O trabalho está associado à
quantidade de energia que uma força
pode proporcionar ou retirar de um
corpo, dependendo se esta força está
agindo na mesma direção e sentido do
deslocamento (𝑑) do corpo, ou, se está
na mesma direção e sentido contrário ao
deslocamento. Podemos, então, calcular
o trabalho de uma força como sendo o
produto escalar entre o vetor força e o
vetor deslocamento do corpo da
seguinte maneira:
W = 𝐹 . 𝑑 = F d cos 𝜃
Onde 𝜃 é sempre o ângulo formado pelo
vetor força e o vetor deslocamento.
Exemplo 5: Calcule o trabalho
produzido por uma força de 30 N
atuando em um bloco de massa 5 Kg
durante um deslocamento em linha reta
de 10 m, na horizontal. O ângulo entre a
força e a direção paralela à superfície é
60º (Figura 5.40).
Figura 5.40
Resolução:
W = F d cos 𝜃 = (30N) (10m) (cos60º)
= 150 J.
5.8.2 Produto Vetorial
a
c
𝜃
r = 𝑎2 + 𝑏2 + 2 𝑎 𝑏 cos 180º ,
r = 𝑎2 + 𝑏2 − 2 𝑎 𝑏 ,
r = 𝑎 − 𝑏 2 = 𝑏 − 𝑎 2
r = a – b, a > b ou r = b – a, b > a
6
0
º
0 1
0
𝐹
x
(m)
90.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
90
Figura 5.41
Sejam 𝑎 e 𝑏 dois vetores que formam
entre si um ângulo 𝜃. O produto vetorial
entre 𝑎 e 𝑏, representado por 𝑎 x 𝑏 (lê-
se a vetorial b) dá como resultado um
vetor 𝑐 (𝑎 x 𝑏 = 𝑐) que tem
as seguintes características:
Módulo: O módulo do vetor 𝑐 é igual
ao produto do módulo do vetor de 𝑎
pelo módulo de 𝑏 pelo seno do ângulo
formado por 𝑎 e 𝑏:
c = 𝑎 𝑥 𝑏 = a b sen 𝜃 (16)
Direção: O vetor 𝑐 é perpendicular ao
plano determinado pelos vetores 𝑎 e 𝑏,
ou seja, 𝑐 é perpendicular,
simultaneamente a 𝑎 e 𝑏.
Sentido: O sentido do vetor 𝑐 é dado
pela regra da mão direita.
Regra da mão direita: Para determinar o
sentido do vetor 𝑐, considere os vetores
unidos pela origem (Figura 5.41). Os
vetores 𝑎 e 𝑏 determinam um plano,
imagine um eixo perpendicular
passando pela origem dos dois vetores 𝑎
e 𝑏, alinhe sua mão direita podendo
girar em teorno desse eixo, então gire a
mão de 𝑎 para 𝑏, o polegar indicará o
sentido do vetor 𝑐 (Figura 5.41).
Para exemplificar o uso da regra da mão
direita, considere os vetores 𝐸, 𝐹 e 𝐺 da
Figura 5.42 e os seguintes produtos:
Figura 5.42
a) 𝐸 x 𝐹: este vetor dá como resultado
um vetor de direção e sentido iguais
ao vetor 𝐺.
b) 𝐺 x 𝐸: resulta um vetor de direção e
sentido iguais ao do vetor 𝐹.
c) 𝐺 x 𝐹: o vetor resultante tem a
mesma direção que o vetor 𝐸 e
sentido oposto ao mesmo.
Diferentemente do produto escalar, o
produto vetorial não é comutativo, ou
seja, 𝑎 x 𝑏 não é igual a 𝑏 x 𝑎. A
diferença está justamente no vetor
resultado: o módulo será o mesmo, a
direção também, mas o sentido se
inverte caso você inverta a posição dos
91.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
91
dois vetores na regra da mão direita
(Figura 5.43).
Figura 5.43
Fazendo o produto vetorial entre os
vetores unitários:
𝑖 x 𝑖 = 0 𝑗 x 𝑖 = −𝑘 𝑘 x 𝑖 = 𝑗
𝑖 x 𝑗 = 𝑘 𝑗 x 𝑗 = 𝑘 x 𝑗 = −𝑖
𝑖 x 𝑘 = −𝑗 𝑗 x 𝑘 = 𝑖 𝑘 x 𝑘 =
Exemplo 6: Considere a Figura 1.42 e
suponha 𝐸 = 3, 𝐹 = 2 e 𝐺 = 2.
Determine os produtos vetoriais 𝐸 x 𝐹,
𝐸 x 𝐺 e 𝐹 x 𝐺.
Resolução:
𝐸 x 𝐹 = 3𝑖 x 2𝑗 = 6 𝑖 x 𝑗 = 𝑘
𝐸 x 𝐺 = 3𝑖 x 2𝑘 = 6 𝑖 x 𝑘 = -6 𝑗
𝐹 x 𝐺 = 2𝑗 x 2𝑘 = 4 𝑗 x 𝑘 = 4 𝑖
O produto vetorial de dois vetores pode
ser expresso em função das
componentes destes vetores. Seja
𝑎 = 𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧𝑘 e 𝑏 = 𝑏𝑥𝑖 + 𝑏𝑦 𝑗
+ 𝑏𝑧𝑘. Efetuando-se o produto vetorial
entre 𝑎 e 𝑏, segue que:
𝑎 x 𝑏 = (𝑎𝑥𝑖 + 𝑎𝑦 𝑗 + 𝑎𝑧𝑘) x
(𝑏𝑥𝑖 + 𝑏𝑦 𝑗 + 𝑏𝑧𝑘)
𝑎 x 𝑏 = 𝑎𝑥𝑖 x 𝑏𝑥𝑖 + 𝑎𝑥𝑖 x 𝑏𝑦 𝑗 + 𝑎𝑥𝑖 x
𝑏𝑧𝑘 + 𝑎𝑦 𝑗 x 𝑏𝑥𝑖 + 𝑎𝑦 𝑗 x 𝑏𝑦 𝑗 + 𝑎𝑦 𝑗 x
𝑏𝑧𝑘 + 𝑎𝑧𝑘 x 𝑏𝑥𝑖 + 𝑎𝑧𝑘 x 𝑏𝑦 𝑗 + 𝑎𝑧𝑘 x
𝑏𝑧𝑘
𝑎 x 𝑏 = 𝑎𝑥 𝑏𝑥𝑖 x 𝑖 + 𝑎𝑥 𝑏𝑦 𝑖 x 𝑗 + 𝑎𝑥 𝑏𝑧𝑖
x 𝑘 + 𝑎𝑦 𝑏𝑥𝑗 x 𝑖 + 𝑎𝑦 𝑏𝑦 𝑗 x 𝑗 + 𝑎𝑦 𝑏𝑧𝑗 x𝑘
+ 𝑎𝑧𝑏𝑥 𝑘 x 𝑖 + 𝑎𝑧𝑏𝑦 𝑘 x 𝑗 + 𝑎𝑧𝑏𝑧 𝑘 x 𝑘
𝑎 x 𝑏 = 𝑎𝑥𝑏𝑦 𝑘 + 𝑎𝑥𝑏𝑧 (-𝑗) + 𝑎𝑦 𝑏𝑥 (-𝑘)
+ 𝑎𝑦 𝑏𝑧 𝑖 + 𝑎𝑧𝑏𝑥 𝑗 + 𝑎𝑧𝑏𝑦 (-𝑖)
𝑎x𝑏 =(𝑎𝑦 𝑏𝑧 − 𝑎𝑧𝑏𝑦) 𝑖 + (𝑎𝑧𝑏𝑥 − 𝑎𝑥𝑏𝑧)
𝑗+(𝑎𝑥𝑏𝑦 − 𝑎𝑦 𝑏𝑥) 𝑘. (17)
A equação acima pode ser obtida de um
jeito mais simples, utilizando-se um
determinante construído da seguinte
maneira: na sua primeira linha, são
colocados os vetores unitários 𝑖, 𝑗 e 𝑘;
na segunda e na terceira linhas
aparecem, respectivamente, as
componentes dos vetores 𝑎 e 𝑏 nas
direções x, y e z.
92.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
92
𝑎 x 𝑏 =
𝑖 𝑗 𝑘
𝑎𝑥 𝑎𝑦 𝑎𝑧
𝑏𝑥 𝑏𝑦 𝑏𝑧
= (𝑎𝑦 𝑏𝑧 − 𝑎𝑧
𝑏𝑦) 𝑖 + (𝑎𝑧 𝑏𝑥 − 𝑎𝑥 𝑏𝑧) 𝑗 + (𝑎𝑥
𝑏𝑦 − 𝑎𝑦 𝑏𝑥) 𝑘.
Uma vantagem de calcular por este
método é que o vetor resultado já sai em
coordenadas, não é necessário nem
mesmo usar a regra da mão direita para
saber a direção e o sentido do vetor
resultante.
Uma aplicação em Física que utiliza o
produto vetorial é o torque (𝝉), ou
momento de força. O torque é a
tendência de uma força girar um objeto
sobre um eixo. Calcula-se o torque
como sendo o produto vetorial do vetor
raio (origem no ponto de rotação e
extremidade no ponto de aplicação da
força) pelo vetor força que está sendo
aplicada no objeto. A magnitude do
torque depende da intensidade da força
aplicada sobre o objeto, do
comprimento do braço de alavanca (que
liga o eixo de rotação até o ponto de
aplicação da força) e do ângulo entre os
dois.
𝜏 = 𝑟 x 𝐹
𝜏 = r F sen 𝜃
Exemplo 7: Considere um disco de raio
3 metros que pode rotacionar em torno
de seu ponto central. Uma força de 30N
é aplicada tangencialmente, fazendo-o
rodar. Encontre o torque provocado pela
força sobre o disco (módulo, direção e
sentido).
Resolução:
Módulo: 𝜏 = 90 N.m
O sentido pode ser determinado pela
regra da mão direita.
O torque provocado pela força sobre o
disco tem módulo igual a 90 N.m e
aponta para fora da página, sendo
perpendicular ao plano formado por 𝑟 e
𝐹.
𝜏 = 𝑟 x 𝐹 = r F sen 𝜃
𝜏 = (3m) (30N) sen 90º
𝜏 = 90 N.m
𝐹
𝑟
𝜏
93.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
93
Exercícios Propostos:
1) Com os vetores 𝑢 = 2𝑖 + 3𝑗 + 4𝑘 e
𝑣 = 1𝑖 + 5𝑗 − 3𝑘, calcule 𝑢 × 𝑣.
2) Considere um disco de raio 5 metros
que pode rotacionar em torno de seu
ponto central. Uma força de 30N é
aplicada tangencialmente, fazendo-o
rodar. Encontre o torque provocado pela
força sobre o disco (módulo, direção e
sentido).
3) Dados os vetores 𝑡 = (2, −4),
𝑣 = (−5,1) e 𝑧 = (−12,6), determinar
𝑘1 e 𝑘2 tal que 𝑧 = 𝑘1𝑡 + 𝑘2𝑣.
4) Dados os vetores 𝑢 = 1, −1 ,
𝑣 = (−2,2) e 𝑤 = (2,1), calcule:
𝑢 − 𝑣 − 𝑤 − 𝑢
5) Verifique 𝑢 = (−1,0) e 𝑣 = (0,1)
são ortogonais.
6) Dados A(2,4,0) e B(-1,3,2), obter o
ponto C tal que
AC = 3
AB.
7) Determine o módulo dos vetores:
a)
u = (3,2,-6)
b)
v = (13, 12 ,-5)
c)
w = (7,1,-7)
8) Determine o versor de
u = (-5,10,-
10),
v = (3,-1,4) e
w = (1,-2,-3).
9) Dados os pontos A(2,-3,4), B(1,6,2)
e C(3,-12,6), verifique se os vetores
AB
e
AC são colineares
10) Sendo 𝐴 = 3𝑖 + 10 𝑗 + 𝑘 e
𝐵 = −7𝑖 + 𝑗 − 2𝑘, determine o módulo
do vetor 𝐶 = 𝐴 + 𝐵.
11) Sendo 𝐴 = 2𝑖 + 𝑗 − 5𝑘 e 𝐵 = 4𝑖 +
2𝑘, determine os vetores 𝑅 = 2𝐴 + 𝐵
e 𝑆 = 𝐴 - 𝐵.
94.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
94
12) Calcule o ângulo entre os vetores
𝑎 = 3𝑖 - 4𝑗 e 𝑏 = 8𝑖 - 6𝑗.
13) Calcule o trabalho produzido pelas
forças normal (𝑁) e peso (𝑃), sabendo-
se que o bloco desloca-se 10 m no plano
horizontal e possui 3Kg de massa.
Considere g = 10 m/s2
.
14) Seja 𝑎 = 3𝑖 - 𝑘 e 𝑏 = −5𝑗 + 7𝑘.
Encontre o vetor 𝑐 = 𝑎 x 𝑏.
60
º
0 10
𝐹
x (m)
95.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
95
Respostas do Módulo 5
1) -29i +10j + 7k
********************************
2) Sentido k
Direção: perpendicular ao plano do
disco
Módulo 150 N.m
********************************
3) 1
1
K
2
2
K
********************************
4) 3 2 − 5
********************************
5) São ortogonais
********************************
6) C(-7,1,6)
********************************
7) a) 𝑢 = 7
b) 𝑣 = 206
c) 𝑤 = 99
******************************
8) 𝑢 = −
1
3
,
2
3
, −
2
3
𝑣 =
3
26
, −
1
26
,
4
26
𝑤 =
1
14
, −
2
14
, −
3
14
********************************
9)Estes vetores são colineares, pois
existe um fator de proporção entre eles
igual a -1
********************************
10) C = 11,75 unidades
********************************
11) 𝑅 = 8𝑖 + 2𝑗 − 8𝑘 e 𝑆 = −2𝑖 +
𝑗 − 7𝑘.
********************************
12) θ = 16,26º.
********************************
13) 𝑊𝑁 = 0 𝐽 e 𝑊𝑃 = 0 𝐽.
********************************
14) 𝑐 = −5𝑖 - 21𝑗 - 15𝑘.
********************************
96.
Programa de Pós-Graduaçãoem Física
Curso de Verão de Matemática Básica – 2011.1
96
Referências Bibliográficas
[1] PAIVA, Manoel. Matemática, 1ª ed.
São Paulo, Moderna, 2004.
[2] EDWALDO BIANCHINI.
Matemática - 5ª a 8ª Série. – Editora
Moderna.
[3] Iezzi, G.: Fundamentos de
Matemática Elementar, vol. 1, Atual
Editora.
[4] Iezzi, G.: Fundamentos de
Matemática Elementar, vol. 2, Atual
Editora.
[5] DANTE, Luiz Roberto. Tudo é
Matemática. 9ª ano. São Paulo: Ática,
2009
[6] BIANCHINI, Edwaldo. Matem tica:
volume I. 4. ed.rev. e ampl. S o Paulo,
Moderna, 1996.
[7] KÜHLKAMP, Nilo. Cálculo 1, 2ed.,
Editora da UFSC, 2001.




































![Programa de Pós-Graduação em Física
Curso de Verão de Matemática Básica – 2011.1
37
Antes de dar uma definição formal de
função mostram-se necessárias outras
duas definições, a saber, a de produto
cartesiano e a de relação entre dois
conjuntos.
De acordo com [1], temos a definição
de produto cartesiano:
Produto Cartesiano: Sejam A e B
conjuntos diferentes do vazio. Chama-
se produto cartesiano de A por B, e
indica-se por B
A , o conjunto cujos
elementos são todos os pares ordenados
)
,
( y
x , tais que A
x e B
y , ou seja:
}
|
)
,
{( B
y
e
a
x
y
x
B
A
Também na mesma referência,
encontramos uma boa definição de
relação entre dois conjuntos:
Relação entre dois conjuntos: Dados
dois conjuntos A e B, chama-se relação
R de A em B todo subconjunto do
produto cartesiano B
A .
Finalmente estamos aptos a definir de
maneira precisa o que é uma função,
segundo as palavras encontradas na
referência [1]:
Função: Sejam A e B conjuntos
diferentes do vazio. Uma relação f de A
em B é função se, e somente se, todo
elemento de A estiver associado,
através de f, a um único elemento de B.
Vamos explorar um pouco estas
definições através de exemplos.
Exemplo 1 – Produto cartesiano:
Sejam os conjuntos A={1,2,3} e
B={4,5,6}, então o produto cartesiano
B
A é dado por:
(3,6)}
(3,5),
(3,4),
(2,6),
(2,5),
(2,4),
(1,6),
(1,5),
{(1,4),
B
A
Exemplo 2 – Relação entre dois
conjuntos:
Sejam os mesmos conjuntos A e B do
exemplo 1. Seja a relação R dada por:
}
2
|
)
,
{( x
y
B
A
y
x
R
.
Neste caso, o subconjunto dado pela
relação R é formado pelos elementos:
)}
6
,
3
(
),
4
,
2
{(
R
Aqui cabem mais quatro definições:
Domínio [1]: o conjunto formado pelos
primeiros elementos dos pares
ordenados de uma relação R entre dois](https://image.slidesharecdn.com/apostila-de-matematica-basica-com-capa-250222141306-c8df4a2d/85/Apostila-de-Matematica-Basica-com-capa-pdf-37-320.jpg)
![Programa de Pós-Graduação em Física
Curso de Verão de Matemática Básica – 2011.1
38
conjuntos. Representamos este conjunto
por )
(R
Dom .
No exemplo 2 temos {2,3}
)
(
R
Dom .
Imagem [1]: o conjunto formado pelos
segundos elementos dos pares
ordenados de uma relação R entre dois
conjuntos. Representamos este conjunto
por ).
Im(R
No exemplo 2 temos }
6
,
4
{
)
Im(
R .
Conjunto de partida: o conjunto que
contém ou é igual ao Domínio de uma
relação R entre dois conjuntos.
No exemplo 2 temos A sendo o
conjunto de partida da relação R.
Conjunto de chegada (contradomínio):
o conjunto que contém ou é igual a
imagem de uma relação R entre dois
conjuntos.
No exemplo 2 temos B sendo o
conjunto de chegada, ou contradomínio,
da relação R.
Note que R do exemplo 2 não é uma
função de A em B pois o elemento 1 do
conjunto de partida A não possui
imagem no conjunto de chegada B.
Exemplo 3 – Função:
Sejam os conjuntos A={1,2,3,4} e
B={1,4,9,16,25} e a relação R dada por:
}
|
)
,
{( 2
x
y
B
A
y
x
R
Neste caso a relação R de fato é uma
função pois todo elemento de A possui
uma única imagem em B.
O conjunto R é dado por:
R={(1,1),(2,4),(3,9),(4,16)}
Note que ele é apenas um subconjunto
de B
A , como especifica a definição
de relação. Ainda, devemos perceber
que o domínio coincide com o conjunto
de partida e que a imagem está contida
no contradomínio, sendo, portanto,
menor que este em quantidade de
elementos.
Exemplo 4:
Sejam os conjuntos: A={1,4,9} e B={-
3,-2,-1,1,2,3}. Seja também a relação R
dada por:
}
|
)
,
{( x
y
B
A
y
x
R
Neste caso R não é uma função de A em
B, porque cada elemento de A, o
conjunto de partida, está associado por
meio de R a dois elementos de B.](https://image.slidesharecdn.com/apostila-de-matematica-basica-com-capa-250222141306-c8df4a2d/85/Apostila-de-Matematica-Basica-com-capa-pdf-38-320.jpg)










![Programa de Pós-Graduação em Física
Curso de Verão de Matemática Básica – 2011.1
49
Ponto máximo:
𝑆𝑣 = −
∆
4𝑎
= −
120 2
− 4. −9 . 0
4. −9
𝑆𝑣 = −
14400
−36
= 400𝑚
3.7 Função Polinomial
É a função 𝒇: 𝑹 → 𝑹 definida por
𝒇 𝒙 = 𝒂𝟎𝒙𝒏
+ 𝒂𝟏𝒙𝒏−𝟏
+. . . + 𝒂𝒏−𝟏𝒙 +
𝒂𝒏
em que ao, a1,..., an são números
reais chamados coeficientes e n, inteiro
não negativo, determinam o grau da
função.
O gráfico de uma função polinomial é
uma curva que pode apresentar pontos
de máximos e de mínimos. Seu domínio
é sempre o conjunto dos Reais.
Exemplos:
1) A função constante 𝒇(𝒙) = 𝒌 é uma
função polinomial de grau zero.
2) A função 𝒇(𝒙) = 𝒂𝒙 + 𝒃, 𝒂 ≠ 𝟎 é
uma função polinomial de primeiro
grau.
3) A função quadrática 𝒇(𝒙) = 𝒂𝒙𝟐
+
𝒃𝒙 + 𝒄, 𝒂 ≠ 𝟎 é uma função
polinomial de segundo grau.
4) A função 𝒇(𝒙) = 𝒙𝟑
é uma função
polinomial cúbica.
5) A função f(𝒙) = 𝟓𝒙𝟓
– 𝟔𝒙 + 𝟕 é
uma função polinomial de quinto grau.
3.8 Gráficos
Se desenharmos duas retas
perpendiculares entre si e dermos a elas
uma escala apropriada construímos um
plano cartesiano. Por comodidade
orienta-se uma das retas
horizontalmente no papel e a outra,
como conseqüência da ortogonalidade à
primeira, estará orientada verticalmente.
Chamaremos o eixo horizontal de
abscissa e o vertical de ordenada.
Se representarmos cada par ordenado
(x,y) de uma relação entre dois
conjuntos no plano cartesiano estaremos
construindo o gráfico da relação em
questão.
Exemplo 12:
Sejam os conjuntos A e B e a relação
R={(x,y) A×B | y= x2
}. A
representação gráfica de R é dada pela
figura abaixo, onde restringimos o
domínio ao intervalo [-3,3] e o
contradomínio ao intervalo [0,9]:](https://image.slidesharecdn.com/apostila-de-matematica-basica-com-capa-250222141306-c8df4a2d/85/Apostila-de-Matematica-Basica-com-capa-pdf-49-320.jpg)










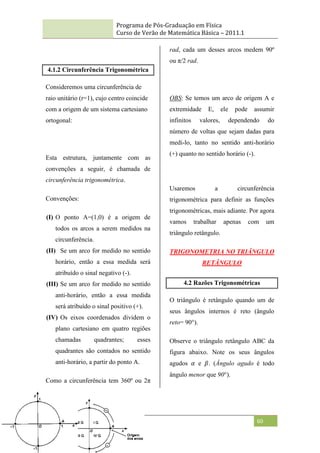





![Programa de Pós-Graduação em Física
Curso de Verão de Matemática Básica – 2011.1
66
Seno da diferença de dois arcos
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
Demonstração:
Podemos reescrever o seno da diferença
como:
)]
(
sin[
)
sin( b
a
b
a
e aplicar a fórmula da soma, obtendo:
a
b
b
a
b
a cos
)
sin(
)
cos(
sin
)
sin(
Uma vez notando que o cosseno de um
ângulo corresponde à abscissa do
sistema cartesiano que contém a
circunferência trigonométrica, é fácil
ver que:
b
b cos
)
cos(
e que:
b
b sin
)
sin(
Com esses resultados estabelece-se a
igualdade requerida:
a
b
b
a
b
a cos
sin
cos
sin
)
sin(
completando a demonstração.
Cosseno da soma de dois arcos
b
a
b
a
b
a sin
sin
cos
cos
)
cos(
Demonstração:
Para demonstrar este resultado devemos
notar as seguintes igualdades:
c
c
c
c
c
c
c
c
c
c
o
o
o
o
o
o
o
o
sin
)
180
sin(
cos
180
sin
180
cos
sin
)
180
sin(
cos
)
90
sin(
cos
90
sin
90
cos
sin
)
90
sin(
uma vez que cosseno de 90o
é nulo e o
seno deste ângulo é igual a 1 e cosseno
de 180o
é -1 e seno deste ângulo é nulo.
(Ver as figuras que estendem as
definições de senos e cossenos para
quaisquer ângulos, notando as
coordenadas das interseções da
circunferência trigonométrica com os
eixos coordenados).
Sendo assim, temos:](https://image.slidesharecdn.com/apostila-de-matematica-basica-com-capa-250222141306-c8df4a2d/85/Apostila-de-Matematica-Basica-com-capa-pdf-66-320.jpg)





























![Programa de Pós-Graduação em Física
Curso de Verão de Matemática Básica – 2011.1
96
Referências Bibliográficas
[1] PAIVA, Manoel. Matemática, 1ª ed.
São Paulo, Moderna, 2004.
[2] EDWALDO BIANCHINI.
Matemática - 5ª a 8ª Série. – Editora
Moderna.
[3] Iezzi, G.: Fundamentos de
Matemática Elementar, vol. 1, Atual
Editora.
[4] Iezzi, G.: Fundamentos de
Matemática Elementar, vol. 2, Atual
Editora.
[5] DANTE, Luiz Roberto. Tudo é
Matemática. 9ª ano. São Paulo: Ática,
2009
[6] BIANCHINI, Edwaldo. Matem tica:
volume I. 4. ed.rev. e ampl. S o Paulo,
Moderna, 1996.
[7] KÜHLKAMP, Nilo. Cálculo 1, 2ed.,
Editora da UFSC, 2001.](https://image.slidesharecdn.com/apostila-de-matematica-basica-com-capa-250222141306-c8df4a2d/85/Apostila-de-Matematica-Basica-com-capa-pdf-96-320.jpg)