Baixado 95 vezes






![5.3 Esta figura mostra a rota¸˜o da casa por 45◦ . Da mesma forma que para a escala, a rota¸˜o
ca ca
tamb´m ´ feita em rela¸˜o a origem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
e e ca 52
5.4 Derivando a equa¸˜o de rota¸˜o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ca ca 52
5.5 O espa¸o de Coordenadas Homogˆneas XY W , com o plano W = 1 e o ponto P (X, Y, W )
c e
projetado sobre o plano W = 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.6 Um cubo unit´rio ´ rodados 45 graus, posteriormente escalado n˜o uniformemente. Obtem-
a e a
se dessa forma uma transforma¸˜o afim. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ca 54
5.7 Reflex˜o de um objeto em torno do eixo x. . . . . . . . . . . . . . . . . . . . . . . . . . .
a 55
5.8 Reflex˜o de um objeto em torno de um eixo perpendicular ao plano xy, passando pela origem.
a 56
5.9 Rota¸˜o em rela¸˜o ao Ponto P 1, por um ˆngulo θ. . . . . . . . . . . . . . . . . . . . . . .
ca ca a 58
5.10 Escala e rota¸˜o de uma casa em rela¸˜o ao ponto P1 . . . . . . . . . . . . . . . . . . . . .
ca ca 59
5.11 Janela em Coordenadas do mundo e porta de vis˜o em coordenadas de tela. . . . . . . . .
a 60
5.12 Duas portas de vis˜o associadas a mesma janela. . . . . . . . . . . . . . . . . . . . . . . .
a 60
5.13 Os passos da transforma¸˜o janela - porta de vis˜o. . . . . . . . . . . . . . . . . . . . . . .
ca a 61
5.14 Primitivas gr´ficas de sa´ em coordenadas do mundo s˜o recortadas pela janela. O seu
a ıda a
interior ´ apresentado na tela (viewport). . . . . . . . . . . . . . . . . . . . . . . . . . . .
e 61
5.15 Sistema de Coordenadas dado pela Regra da M˜o Direita. . . . . . . . . . . . . . . . . . .
a 63
5.16 Transformando P1 , P2 e P3 da posi¸˜o inicial em (a) para a posi¸˜o final em (b). . . . . .
ca ca 65
5.17 Rota¸˜o dos pontos P1 , P2 e P3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ca 66
5.18 Rota¸˜o em rela¸˜o ao eixo x. P1 e P2 de comprimento D2 ´ rotacionado em dire¸˜o ao
ca ca e ca
eixo z, pelo ˆngulo positivo f. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
a 66
5.19 Rota¸˜o em rela¸˜o ao eixo z. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ca ca 67
5.20 Os vetores unit´rios Rx , Ry e Rz , os quais s˜o transformados nos eixos principais. . . . .
a a 68
6.1 Atributos da cˆmera [Schr¨eder, 1998]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
a o 69
6.2 Movimentos de cˆmera [Schr¨eder, 1998]. . . . . . . . . . . . . . . . . . . . . . . . . . . .
a o 70
6.3 Movimentos de cˆmera [Schr¨eder, 1998]. . . . . . . . . . . . . . . . . . . . . . . . . . . .
a o 71
6.4 Um VCS baseado na regra da m˜o direita com xv , yv e zv .relativos ao sistema de coorde-
a
nadas do mundo [Hearn and Baker, 1994]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.5 Orienta¸˜es do plano de observa¸˜o conforme o vetor normal. O vetor (1, 0, 0) d´ a ori-
co ca a
enta¸˜o em (a) e (1, 0, 1), a orienta¸˜o em (b) [Hearn and Baker, 1994]. . . . . . . . . . .
ca ca 72
6.6 Taxomia de proje¸˜es [Plastock and Kalley, 1999]. . . . . . . . . . . . . . . . . . . . . . .
co 73
6.7 Linha AB e sua proje¸˜o A’B’: (a) perspectiva; (b) ortogonal. . . . . . . . . . . . . . . . .
ca 73
6.8 Proje¸˜es de um cubo (com 1 ponto de fuga) sobre um plano cortando o eixo Z, apresen-
co
tando o ponto de fuga. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.9 Proje¸˜es perspectivas com 2 pontos de fuga ( o plano de proje¸˜o intercepta 2 eixos (x e
co ca
z)). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.10 Proje¸˜es perspectivas com 3 pontos de fuga ( o plano de proje¸˜o intercepta os 3 eixos).
co ca 75
6.11 A esfera B ´ bem maior que a esfera A, por´m ambas aparecem com o mesmo tamanho
e e
quando projetadas no plano de vis˜o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
a 75
6.12 Confus˜o visual da perpectiva (objeto atr´s do centro de proje¸˜o). . . . . . . . . . . . . .
a a ca 76
6.13 Proje¸˜o em perspectiva de um ponto P=(x, y, z) na posi¸˜o (xp, yp, zp) sobre o plano
ca ca
de proje¸˜o [Hearn and Baker, 1994]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ca 76
6.14 Proje¸˜o ortogonal de um ponto no plano de proje¸˜o [Hearn and Baker, 1994]. . . . . . .
ca ca 77
7.1 Exemplos de recorte de segmentos de reta. . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2 C´digos das regi˜es. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
o o 80
7.3 Funcionamento do algoritmo de Cohen-Sutherland para recorte de segmentos. . . . . . . . 80
7.4 Algoritmo de Sutherland-Hodgman para Recorte de Pol´ ıgonos. . . . . . . . . . . . . . . . 83
7.5 Exemptos de recorte de pol´ıgonos. (a) M´ltiplos componentes. (b) Caso convexo (c) Caso
u
cˆncavo com muitas arestas exteriores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
o 83
7.6 Quatro situa¸˜es poss´
co ıveis no recorte de pol´ ıgonos. . . . . . . . . . . . . . . . . . . . . . . 84
8.1 Representa¸˜o de superf´
ca ıcies atrav´s de malhas. . . . . . . .
e . . . . . . . . . . . . . . . . . 86
8.2 Aproxima¸˜o de curvas por segmentos de reta conectados. .
ca . . . . . . . . . . . . . . . . . 87
8.3 Aproxima¸˜o de curvas por segmentos de reta conectados. .
ca . . . . . . . . . . . . . . . . . 88
8.4 Pontos de uma circunferˆncia. . . . . . . . . . . . . . . . . .
e . . . . . . . . . . . . . . . . . 90
8.5 Representa¸˜o de uma curva de B´zier definida pelos pontos
ca e B0 , B1 , B2 e B3 . . . . . . . . 90
8.6 Fun¸˜es de blending para v´rios valores de n. . . . . . . . .
co a . . . . . . . . . . . . . . . . . 91
11.1 Espectro eletromagn´tico [Gro94]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
e 95
6](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-7-320.jpg)
![11.2 Ilustra¸˜o da mistura de cores aditivas [For94]. . . . . . . . . . . . . .
ca . . . . . . . . . . . 97
11.3 Ilustra¸˜o da mistura de cores subtrativas [For94]. . . . . . . . . . . .
ca . . . . . . . . . . . 97
11.4 Ilustra¸˜o da obten¸˜o de tints, shades e tones. . . . . . . . . . . . . .
ca ca . . . . . . . . . . . 97
11.5 Diagrama de cromaticidade do CIE [Hea94]. . . . . . . . . . . . . . . . . . . . . . . . . . . 98
11.6 Representa¸˜o de escalas de cor no diagrama de cromaticidade do CIE
ca [Hea94]. . . . . . . 99
11.7 Cubo do RGB [Fol96]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.8 Cone hexagonal do HSV [Fol96]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.9 Cone duplo do HLS [Fol96]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
12.1 Efeitos sobre uma imagem, de se reduzir o tamanho da grade de amostragem. . . . . . . . 103
12.2 Uma imagem de 512 x 512 pixels, quantizada em (a) 256 n´ ıveis, (b) 128 n´ ıveis, (c) 64
n´
ıveis, (d) 32 n´
ıveis, (e) 16 n´
ıveis, (f) 8 n´ıveis, (g) 4 n´
ıveis e (h) 2 n´ıveis de cinza. . . . . . 104
12.3 Representa¸˜o de um pixel P com 8-bits (8 planos) de profundidade. . . . . . . . . . . . .
ca 104
12.4 Organiza¸˜o de uma LUT, para um sistema de pixels de 8 bits. . . . . . . . . . . . . . . .
ca 105
12.5 Imagens e histogramas de intensidade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.6 Efeito de uma transforma¸˜o dos n´
ca ıveis de cinza efetuado sobre o histograma. . . . . . . . 107
12.7 Manipula¸˜o de janelas de intensidade da imagem atrav´s do histograma. . . . . . . . . .
ca e 107
12.8 Sinais “ru´ıdo” (a) e “degrau” (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
12.9 Sinais “ru´ıdo” (a) e “degrau” (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
12.10Efeitos de filtros lineares ao “ru´ ıdo” e ` “borda”: (a) efeitos de atenua¸˜o; (b) borramento
a ca
da borda; (c) amplia¸˜o do ru´
ca ıdo; (d) realce da borda. . . . . . . . . . . . . . . . . . . . . 110
12.11Efeito do filtro da mediana sobre o “ru´ ıdo” e o “degrau”. . . . . . . . . . . . . . . . . . . 110
12.12Uma transforma¸˜o geom´trica de 90o graus. . . . . . . . . . . . . . . . . . . . . . . . . . .
ca e 111
7](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-8-320.jpg)
![Cap´
ıtulo 1
Introdu¸˜o ` Computa¸˜o Gr´fica
ca a ca a
A Computa¸˜o Gr´fica ´ a ´rea da ciˆncia da computa¸˜o que estuda a gera¸˜o, manipula¸˜o e inter-
ca a e a e ca ca ca
preta¸˜o de modelos e imagens de objetos utilizando computador. Tais modelos vˆm de uma variedade
ca e
de disciplinas, como f´
ısica, matem´tica, engenharia, arquitetura, etc.
a
Pode-se relacionar a Computa¸˜o Gr´fica com 3 sub-´reas [Persiano and Oliveira, 1989]:
ca a a
• S´
ıntese de Imagens: ´rea que se preocupa com a produ¸˜o de representa¸˜es visuais a partir
a ca co
co e ´
das especifica¸˜es geom´trica e visual de seus componentes. E freq¨entemente confundida com a
u
pr´pria Computa¸˜o Gr´fica. As imagens produzidas por esta sub-´rea s˜o geradas a partir de
o ca a a a
dados mantidos nos chamados Display-Files.
• Processamento de Imagens: envolve as t´cnicas de transforma¸˜o de Imagens, em que tanto
e ca
a imagem original quanto a imagem resultado apresentam-se sob uma representa¸˜o visual (ge-
ca
ralmente matricial). Estas transforma¸˜es visam melhorar as caracter´
co ısticas visuais da imagem
(aumentar contraste, foco, ou mesmo diminuir ru´ ıdos e/ou distor¸˜es). As imagens produzi-
co
das/utilizadas por esta sub-´rea s˜o armazenadas/recuperadas dos chamados Raster-Files.
a a
• An´lise de Imagens: ´rea que procura obter a especifica¸˜o dos componentes de uma imagem a
a a ca
partir de sua representa¸˜o visual. Ou seja a partir da informa¸˜o pict´rica da imagem (a pr´pria
ca ca o o
imagem!) produz uma informa¸˜o n˜o pict´rica da imagem (por exemplo, as primitivas geom´tricas
ca a o e
elementares que a comp˜em).
o
Figura 1.1: Relacionamento entre as 3 sub´reas da Computa¸˜o Gr´fica.
a ca a
Na ultima d´cada somou-se a esse contexto a ´rea de Visualiza¸˜o de Dados, tamb´m chamada
´ e a ca e
Visualiza¸˜o Computacional [Minghim and Oliveira, 1997, Schr¨eder et al., 1996], que usa t´cnicas de
ca o e
Computa¸˜o Gr´fica para representar informa¸˜o, de forma a facilitar o entendimento de conjuntos de
ca a ca
dados num´ricos de alta complexidade. Exemplos de ´reas de aplica¸˜o s˜o: visualiza¸˜o de imagens
e a ca a ca
m´dicas, meteorologia, dados financeiros, visualiza¸˜o de programas, dinˆmica dos fluidos, e muitas
e ca a
8](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-9-320.jpg)






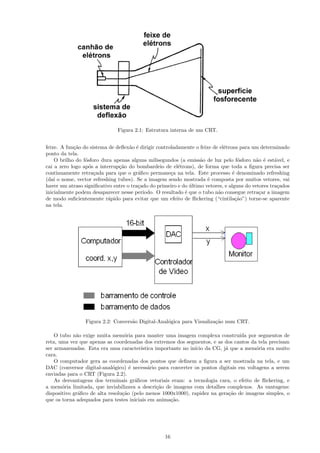
![2.1.3 Terminais CRT com mem´ria (Direct View Storage Tubes)
o
O CRT com mem´ria ´ um tubo especial que se comporta como se o f´sforo fosse de alt´
o e o ıssima persistˆncia.
e
Uma imagem tra¸ada nesse tipo de tubo pode manter-se por mais de uma hora sem sofrer desvanecimento.
c
Entretanto, o tubo ´ constru´ com f´sforo comum, e a longa persistˆncia da imagem ´ conseguida pela
e ıdo o e e
inclus˜o de dois elementos adicionais ao tubo: um canh˜o espalhador de el´trons e uma m´scara montada
a a e a
sobre a superf´ do f´sforo, entre a tela e os canh˜es.
ıcie o o
Os el´trons s˜o uniformemente espalhados por toda a superf´ da tela pelo canh˜o espalhador, e a
e a ıcie a
m´scara funciona como um filtro que seleciona os pontos ou ´reas da superf´ a serem atingidas pelos
a a ıcie
el´trons. Para isso, a m´scara ´ constru´ de material diel´trico pass´ de ser carregado de maneira n˜o
e a e ıda e ıvel a
uniforme. As ´reas carregadas positivamente atraem os el´trons, permitindo que passem pela m´scara.
a e a
Onde h´ carga negativa, os el´trons s˜o repelidos, e n˜o atingem o f´sforo.
a e a a o
Um canh˜o de el´trons ´ respons´vel pela emiss˜o de um feixe fino e intenso de el´trons que produz a
a e e a a e
carga diferenciada na m´scara. Dessa forma s˜o criados “buracos” na m´scara que deixar˜o os el´trons
a a a a e
do outro canh˜o passarem, definindo a forma da imagem a ser gerada. O desenho gravado na m´scara
a a
sustenta a imagem na tela at´ que uma voltagem positiva seja enviada para a m´scara, apagando a
e a
imagem.
Vantagens dos sistemas DVST: alta resolu¸˜o (pelo menos 1024x781); ausˆncia de flickering. Desvan-
ca e
tagens: n˜o h´ como apagar seletivamente a imagem. O apagamento da tela ´ sempre global, resultante
a a e
do carregamento uniforme da mascara; o apagamento causa um efeito de flashing na tela; a tecnologia
n˜o ´ adequada para monitores coloridos (usa apenas f´sforo verde); a imagem perde defini¸˜o com o
a e o ca
tempo; os tubos desgastam e precisam ser substitu´ ıdos.
A tecnologia dos DVST est´ ultrapassada, tendo sido substitu´ pelos dispositivos de varredura
a ıda
matriciais.
2.2 Primitivas de Software para Dispositivos Vetoriais
Uma primitiva de software ´ uma rotina ou um comando escrito em alguma linguagem que executa uma
e
fun¸˜o b´sica de um aplicativo: ou seja, uma primitiva de software implementa uma unica fun¸˜o. Um
ca a ´ ca
sistema de software complexo ´ constru´ atrav´s de chamadas hier´rquicas para suas fun¸˜es primitivas.
e ıdo e a co
Praticamente todos os dispositivos de sa´ vetoriais trabalham com duas primitivas de software
ıda
b´sicas: moveto(dcx,dcy) e drawto(dcx,dcy). A primeira move a posi¸˜o corrente (CP - current position)
a ca
do feixe (ou caneta, no caso de um plotter ) para o ponto definido pelas coordenadas do dispositivo
especificadas, (dcx, dcy), que passa a definir a nova CP. A segunda desenha um linha reta (ou, em outras
palavras, um vetor) entre o ponto definido pela CP e o ponto definido pelas coordenadas (dcx, dcy), que
passa a ser a nova CP.
Num sistema gr´fico com v´rios dispositivos de sa´ conectados ao computador hospedeiro, cada qual
a a ıda
com seu pr´prio sistema de coordenadas, ´ conveniente que o sistema disponha de primitivas gen´ricas
o e e
que sejam acessadas de maneira independente do dispositivo - atrav´s de NDCs ou de coordenadas f´
e ısicas.
As rotinas gen´ricas move to e draw to, nesse caso, cont´m estruturas “case” com comandos alternativos
e e
para cada dispositivo admitido, e enviam a sa´ para o dispositivo de sa´ correntemente ativado, depois
ıda ıda
de fazer as convers˜es apropriadas [Rankin, p. 29].
o
2.3 Dispositivos Gr´ficos Matriciais
a
2.3.1 Impressoras
Impressoras matriciais: nessas impressoras, os caracteres s˜o impressos por interm´dio de um conjunto
a e
de agulhas - um ponto ´ impresso quando uma agulha pressiona a fita sobre o papel. As agulhas s˜o
e a
montadas sobre um cabe¸ote m´vel, e os diferentes caracteres s˜o obtidos pelo acionamento conveniente
c o a
das agulhas a medida que o cabe¸ote se movimenta.
c
Estas impressoras podem operar no modo texto para a impress˜o de caracteres, ou num modo gr´fico
a a
(“bit image”) pelo qual ´ poss´ controlar cada agulha de modo independente. Em outras palavras, o
e ıvel
conjunto de padr˜es (caracteres) que podem ser impressos ´ program´vel. Cada padr˜o a ser impresso ´
o e a a e
definido por uma pequena matriz de pontos, onde cada ponto pode ser tra¸ado ou n˜o.
c a
Impressoras gr´ficas: Diversas t´cnicas tˆm sido utilizadas na constru¸˜o de impressoras gr´ficas,
a e e ca a
sendo que as mais comuns s˜o as tecnologias de jato de tinta e laser.
a
Nas impressoras a jato de tinta, o cabe¸ote transporta um pequeno bico que expele a tinta num jato
c
´
curto e fino sobre o papel. E poss´ ıvel variar a intensidade do jato, obtendo-se assim controle sobre a
17](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-18-320.jpg)











![void inc_line(int x1, int y1, int x2, int y2, int color){
int dx, dy, incE, incNE, d, x, y;
dx = x2 - x1;
dy = y2 - y1;
d = 2 * dy - dx; /* Valor inicial de d */
incE = 2 * dy; /* Incremento de E */
incNE = 2 * (dy - dx); /* Incremento de NE */
x = x1;
y = y1;
write_pixel(x, y, color);
while (x < x2){
if (d <= 0){
/* Escolhe E */
d = d + incE;
x = x + 1;
}else{
/* Escolhe NE */
d = d + incNE;
x = x + 1;
y = y + 1;
}/* end if */
write_pixel(x, y, color);
}/* end while */
}/* end inc_line */
Algoritmo 3.2: Algoritmo do Ponto-M´dio incremental.
e
disso, haver´ grandes gaps nas regi˜es onde a tangente ` circunferˆncia ´ infinita (valores de x pr´ximos
a o a e e o
a R, Figura 3.8). Uma maneira de resolver o problema dos gaps ´ “plotar” x = R. cos θ e y = R. sin θ,
e
para variando de 0 a 90 graus, mas essa solu¸˜o tamb´m ´ ineficiente, pois precisa de fun¸˜es caras (sin
ca e e co
e cos).
3.3.1 Simetria de ordem 8
Note que o tra¸ado de uma circunferˆncia pode tirar proveito de sua simetria. Considere uma circun-
c e
ferˆncia centrada na origem. Se o ponto (x, y) pertence ` circunferˆncia, pode-se calcular de maneira
e a e
trivial sete outros pontos da circunferˆncia (Figura 3.9). Consequentemente, basta computar um arco de
e
circunferˆncia de 45o para obter a circunferˆncia toda. Para uma circunferˆncia com centro na origem, os
e e e
oito pontos sim´tricos podem ser tra¸ados usando o procedimento CirclePoints (Algoritmo 3.3).
e c
void CirclePoints(int x, int y, int color){
write_pixel( x, y, color);
write_pixel( x, -y, color);
write_pixel(-x, y, color);
write_pixel(-x, -y, color);
write_pixel( y, x, color);
write_pixel( y, -x, color);
write_pixel(-y, x, color);
write_pixel(-y, -x, color);
}/* end CirclePoints */
Algoritmo 3.3: Procedimento CirclePoints.
Vamos estudar especificamente um algoritmo derivado do algoritmo de Bresenham para gera¸˜o de
ca
circunferˆncias, chamado “Midpoint Circle Algorithm” em [Foley et. al].
e
30](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-31-320.jpg)










![volume sob o cone que est´ na regi˜o de interse¸˜o da primitiva com a base do cone. Esse volume, W s,
a a ca
´ uma se¸˜o vertical do cone, como mostrado na Figura 3.18. A altura do cone ´ normalizada para que
e ca e
o volume do mesmo seja igual a 1, garantindo que um pixel que est´ inteiramente sob a base do cone
a
seja tra¸ado com intensidade m´xima. Contribui¸˜es de ´reas da primitiva que interceptam a base mas
c a co a
est˜o distantes do centro do pixel s˜o pequenas, mas ´reas muito pequenas, por´m pr´ximas do centro
a a a e o
do pixel contribuem mais para a cor do mesmo. O resultado dessa abordagem ´ reduzir o contraste entre
e
pixels adjacentes, de forma a gerar transi¸˜es visuais mais suaves. Particularmente, linhas horizontais
co
ou verticais com espessura de um pixel agora resultam em mais do que uma unica linha ou coluna de
´
pixels acesos, o que n˜o ocorre na abordagem n˜o ponderada. Essa abordagem pode ser embutida nos
a a
algoritmos de convers˜o matricial, como descrito em Foley et al. [Fol90, se¸˜o 3.17.4]. Outros tipos de
a ca
fun¸˜es podem ser usadas, sendo que existem fun¸˜es ´timas melhores do que a fun¸˜o cˆnica (v. Foley,
co co o ca o
se¸˜o 4.10).
ca
41](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-42-320.jpg)










![Figura 5.5: O espa¸o de Coordenadas Homogˆneas XY W , com o plano W = 1 e o ponto P (X, Y, W )
c e
projetado sobre o plano W = 1.
x 1 0 dx x
y = 0 1 dy · y (5.13)
1 0 0 1 1
Assim, a equa¸˜o 5.13 pode ser representada como:
ca
P = T (dx , dy ) · P (5.14)
onde:
1 0 dx
T (dx , dy ) = 0 1 dy (5.15)
0 0 1
O que acontece se um ponto P ´ transladado por T (dx1 , dy1 ) para P’ e ent˜o transladado por
e a
T (dx2 , dy2 ) para P ?
Intuitivamente esperamos que essas transla¸˜es sejam equivalentes a T (dx1 + dx2 , dy1 + dy2 ). Ou seja,
co
se:
P = T (dx1 , dy1 ) · P (5.16)
P = T (dx2 , dy2 ) · P (5.17)
(5.18)
Substituindo 5.17 em 5.18, temos:
P = T (dx2 , dy2 ) · [T (dx1 , dy1 ) · P ] = [T (dx2 , dy2 ) · T (dx1 , dy1 )] · P (5.19)
e a matriz produto das matrizes T (dx2 , dy2 ) · T (dx1 , dy1 ), ´:
e
1 0 dx2 1 0 dx1 1 0 dx1 + dx2
0 1 dy2 · 0 1 dy1 = 0 1 dy1 + dy2 (5.20)
0 0 1 0 0 1 0 0 1
e vemos que a Transla¸˜o ´ aditiva.
ca e
Essa transforma¸˜o expressa pelas duas transforma¸˜es, ´ chamada de Transforma¸˜o de Composi¸˜o.
ca co e ca ca
Podemos mostrar similarmente que podemos realizar Composi¸˜es tamb´m com a Escala e a Rota¸˜o.
co e ca
Assim, as equa¸˜es de Escala 5.4, s˜o representadas matricialmente:
co a
53](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-54-320.jpg)
![
x sx 0 0 x
y = 0 sy 0 · y (5.21)
1 0 0 1 1
e definindo,
sx 0 0
S(sx , sy ) = 0 sy 0 (5.22)
0 0 1
temos
P = S(sx1 , sy1 ) · P (5.23)
P = S(sx2 , sy2 ) · P (5.24)
e substituindo:
P = S(sx2 , sy2 ) · [S(sx1 , sy1 ) · P ] = [S(sx2 , sy2 ).S(sx1 , sy1 )] · P (5.25)
A matriz produto S(sx2 , sy2 ) · S(sx1 , sy1 ) ´:
e
sx2 0 0 sx1 0 0 sx1 .sx2 0 0
0 sy2 0 · 0 sy1 0 = 0 sy1 .sy2 0 (5.26)
0 0 1 0 0 1 0 0 1
e temos que a Escala ´ multiplicativa.
e
Finalmente, verifiquemos como ficam as equa¸˜es de rota¸˜o:
co ca
x cos θ − sin θ 0 x
y = sin θ cos θ 0 · y (5.27)
1 0 0 1 1
Definindo:
cos θ − sin θ 0
R(θ) = sin θ cos θ 0 (5.28)
0 0 1
temos que:
P = R(θ) · P (5.29)
Como exerc´
ıcio, mostre que duas rota¸˜es s˜o aditivas!
co a
Figura 5.6: Um cubo unit´rio ´ rodados 45 graus, posteriormente escalado n˜o uniformemente. Obtem-se
a e a
dessa forma uma transforma¸˜o afim.
ca
54](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-55-320.jpg)













![Utilizando as propriedades de matrizes ortogonais (ver Equa¸˜es 5.61, 5.62 e a observa¸˜o da se¸˜o
co ca ca
5.8), podemos encontrar uma segunda forma de encontrar a matriz de transforma¸˜es. Relembremos que
co
os vetores unit´rios (de comprimento igual a 1) de R rotacionam em rela¸˜o aos eixos principais.
a ca
Assim,
r1x r2x r3x
R = r1y r2y r3y (5.74)
r1z r2z r3z
Colocando Rz como o vetor unit´rio ao longo de P1 P2 que ir´ rotacionar em dire¸˜o ao eixo z positivo,
a a ca
T P1 P2
Rz = [ r1z r2z r3z ] = (5.75)
|P1 P2 |
O vetor unit´rio Rx ´ perpendicular ao plano de P1 , P2 e P3 e ir´ rotacionar em dire¸˜o ao eixo
a e a ca
x positivo, dessa forma Rx deveria ser o produto vetorial de dois vetores do plano (relembre-se das
propriedades de Produto Vetorial vistos em Geometria Anal´
ıtica !):
T P1 P3 × P1 P2
Rx = [ r1x r2x r3x ] = (5.76)
|P1 P3 × P1 P2 |
e finalmente,
T
Ry = [ r1x r2y r3z ] = Rz × Rx (5.77)
ir´ rotacionar em dire¸˜o ao eixo y positivo. A matriz de composi¸˜o ´ dada por
a ca ca e
r1x r2x r3x 0
r1y r2y r3y 0
· T (−x1 , −y1 , −z1 ) = R · T (5.78)
r1z r2z r3z 0
0 0 0 1
Figura 5.20: Os vetores unit´rios Rx , Ry e Rz , os quais s˜o transformados nos eixos principais.
a a
e R e T s˜o como em 5.78. A Figura 5.20 mostra os vetores individuais Rx , Ry e Rz .
a
68](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-69-320.jpg)
![Cap´
ıtulo 6
Observa¸˜o de Cenas 3D
ca
6.1 Pipeline de observa¸˜o (“viewing pipeline”)
ca
Ap´s a cria¸˜o de cenas e objetos tridimensionais o pr´ximo passo ´ efetuar a sua apresenta¸˜o. Ao
o ca o e ca
gerar imagens de cenas 3D em computa¸˜o gr´fica, fazemos uma analogia com uma cˆmera fotogr´fica:
ca a a a
imaginamos um observador que, posicionado em um ponto de observa¸˜o, vˆ a cena atrav´s das lentes de
ca e e
uma cˆmera virtual que pode ser posicionada de forma a obter a imagem desejada da cena (o “fot´grafo”
a o
pode definir a posi¸˜o da cˆmera, sua orienta¸˜o e ponto focal). A fotografia que se obt´m com uma
ca a ca e
cˆmera real ´ uma proje¸˜o da cena em um plano de imagem 2D (o filme na cˆmera). Da mesma forma
a e ca a
que no mundo real, a imagem que se obt´m da cena sint´tica depende de v´rios fatores que determinam
e e a
como esta ´ projetada em um plano para formar a imagem 2D exibida (por exemplo) no monitor. Estes
e
parˆmetros incluem a posi¸˜o da cˆmera, sua orienta¸˜o e ponto focal, o tipo de proje¸˜o efetuada
a ca a ca ca
e a posi¸˜o dos “planos de recorte” (clipping planes).
ca
A posi¸˜o e o ponto focal da cˆmera definem, respectivamente, aonde a cˆmera est´ e para onde
ca a a a
ela est´ apontando. O vetor que vai da posi¸˜o da cˆmera ao ponto focal ´ denominado dire¸˜o de
a ca a e ca
proje¸˜o. O plano de imagem, que ´ o plano no qual a cena ser´ projetada, est´ posicionado no ponto
ca e a a
focal e, tipicamente, ´ perpendicular ao vetor dire¸˜o de proje¸˜o (Figura 6.1). A orienta¸˜o da cˆmera
e ca ca ca a
´ controlada pela sua posi¸˜o, seu ponto focal e por um outro vetor denominado view up. Estes trˆs
e ca e
parˆmetros definem completamente a cˆmera.
a a
Figura 6.1: Atributos da cˆmera [Schr¨eder, 1998].
a o
O m´todo de proje¸˜o controla como os atores da cena s˜o mapeados no plano de imagem: na proje¸˜o
e ca a ca
ortogr´fica, ou proje¸˜o paralela, o processo de mapeamento ´ paralelo: assume-se que todos os raios de
a ca e
luz que atingem a cˆmera s˜o paralelos ao vetor de proje¸˜o. Na proje¸˜o perspectiva, todos os raios
a a ca ca
convergem para um ponto comum, denominado ponto de observa¸˜o, ou centro da proje¸˜o. Nesse caso,
ca ca
deve-se determinar o ˆngulo de vis˜o da cˆmera.
a a a
Os planos de recorte anterior e posterior interceptam o vetor de proje¸˜o e s˜o, geralmente, per-
ca a
pendiculares a ele. Os planos de recorte s˜o usados para eliminar atores que est˜o muito pr´ximos ou
a a o
muito distantes da cˆmera, de forma que apenas os atores que est˜o na ´rea englobada pelos planos
a a a
de recorte s˜o potencialmente vis´
a ıveis. Em geral, os planos de recorte s˜o perpendiculares ` dire¸˜o
a a ca
69](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-70-320.jpg)
![de proje¸˜o. Suas posi¸˜es podem ser especificadas usando o chamado intervalo de recorte (“clipping
ca co
range”) da cˆmera: a localiza¸˜o dos planos ´ dada a partir da posi¸˜o da cˆmera, ao longo da dire¸˜o
a ca e ca a ca
de proje¸˜o. A posi¸˜o do plano anterior d´ o valor m´
ca ca a ınimo do intervalo, e a posi¸˜o do plano posterior
ca
d´ o valor m´ximo.
a a
A cˆmera pode ser manipulada diretamente atrav´s dos parˆmetros acima descritos, mas existem
a e a
algumas opera¸˜es comuns que facilitam a tarefa de quem gera a imagem, como ilustradas nas figuras
co
6.2 e 6.3:
• Azimuth - rotaciona a posi¸˜o da cˆmera ao redor do seu vetor view up, com centro no ponto focal
ca a
• Elevation - rotaciona a posi¸˜o da cˆmera ao redor do vetor dado pelo produto vetorial entre o
ca a
vetor view up e o vetor dire¸˜o de proje¸˜o, com centro no ponto focal.
ca ca
• Roll (Twist) - rotaciona o vetor view up em torno do vetor normal ao plano de proje¸˜o.
ca
• Yaw - rotaciona o ponto focal da cˆmera em torno do vetor view up, com centro na posi¸˜o da
a ca
cˆmera.
a
• Pitch - rotaciona o ponto focal ao redor do vetor dado pelo produto vetorial entre o vetor view up
e o vetor dire¸˜o de proje¸˜o, com centro na posi¸˜o da cˆmera.
ca ca ca a
• Dolly - (in, out) move a posi¸˜o da cˆmera ao longo da dire¸˜o de proje¸˜o (mais pr´ximo ou mais
ca a ca ca o
distante do ponto focal).
• Zoom - altera o ˆngulo de vis˜o da cˆmera, de modo que uma regi˜o maior ou menor da cena fique
a a a a
na regi˜o que ´ potencialmente vis´
a e ıvel.
Figura 6.2: Movimentos de cˆmera [Schr¨eder, 1998].
a o
Em resumo, gerar uma vista de um objeto em trˆs dimens˜es ´ similar a fotografar o objeto. Podemos
e o e
caminhar na cena e fotografar de qualquer ˆngulo, de v´rias distˆncias e com diferentes orienta¸˜es da
a a a co
cˆmera. A regi˜o da cena que aparece no visor da m´quina ´ o que vai ser projetado na superf´ do
a a a e ıcie
filme. O tipo e o tamanho da lente da cˆmera determinam quais partes da cena aparecem na foto final.
a
Estas id´ias est˜o incorporadas nas APIs gr´ficas 3D, de forma que vistas de uma cena podem ser geradas
e a a
a partir da defini¸˜o de parˆmetros como posi¸˜o espacial, orienta¸˜o e ˆngulo de abertura da “cˆmera
ca a ca ca a a
virtual”.
6.2 Coordenadas de Observa¸˜o
ca
6.2.1 Especifica¸˜o do sistema de coordenadas de observa¸˜o
ca ca
Escolhemos uma “vista” espec´
ıfica para uma cena estabelecemos primeiramente um sistema de coordena-
das de observa¸˜o (Viewing Coordinate System - VCS, ou View reference Coordinate System). Um plano
ca
70](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-71-320.jpg)
![Figura 6.3: Movimentos de cˆmera [Schr¨eder, 1998].
a o
de observa¸˜o, ou plano de proje¸˜o, ´ definido, que ´ perpendicular ao eixo z do sistema de coordenadas
ca ca e e
de visualiza¸˜o VCS (esse plano faz o papel do plano do filme na cˆmera virtual). Em seguida, ´ preciso
ca a e
transformar a descri¸˜o da cena dada no sistema de coordenadas do mundo (WC - World Coordinates)
ca
para uma descri¸˜o no sistema de coordenadas de observa¸˜o VCS.
ca ca
Mas, como determinamos o VCS? Inicialmente, estabelecemos a origem do sistema. Para isso, usamos
um ponto inicialmente definido no WC, o View Reference Point - VRP. Podemos pensar nesse ponto como
sendo a posi¸˜o da cˆmera. Em seguida, selecionamos a dire¸˜o positiva para o eixo z do VCS (vamos
ca a ca
denotar esse eixo por zv ), bem como a orienta¸˜o do plano de observa¸˜o, especificando o vetor normal
ca ca
ao plano de observa¸˜o, N . Finalmente, definimos a dire¸˜o do eixo y do VCS (yv ) especificando-se um
ca ca
vetor V (View Up). Obviamente, V deve ser perpendicular a N . Pode ser dif´ para o programador
ıcil
determinar V exatamente de forma a satisfazer essa condi¸˜o. Tipicamente, as transforma¸˜es de ob-
ca co
serva¸˜o implementadas nos pacotes gr´ficos ajustam V projetando-o em um plano que ´ perpendicular
ca a e
ao vetor N : dessa forma, o programador pode escolher qualquer dire¸˜o conveniente para o vetor V ,
ca
desde que n˜o seja paralela ` N . A partir dos vetores N e V , o pacote gr´fico pode computar um terceiro
a a a
vetor U , perpendicular a ambos, que define a dire¸˜o para o eixo xv do VCS (veja Figuras 6.4 e 6.5).
ca
Figura 6.4: Um VCS baseado na regra da m˜o direita com xv , yv e zv .relativos ao sistema de coordenadas
a
do mundo [Hearn and Baker, 1994].
6.2.2 Transforma¸˜o do sistema de coordenadas do mundo para o sistema de
ca
coordenadas de observa¸˜o
ca
Antes que as descri¸˜es do objeto (em WC) possam ser projetadas no plano de observa¸˜o, elas preci-
co ca
sam ser transformadas para as coordenadas do VCS. A convers˜o das coordenadas de WC para VCS ´
a e
71](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-72-320.jpg)
![Figura 6.5: Orienta¸˜es do plano de observa¸˜o conforme o vetor normal. O vetor (1, 0, 0) d´ a orienta¸˜o
co ca a ca
em (a) e (1, 0, 1), a orienta¸˜o em (b) [Hearn and Baker, 1994].
ca
equivalente a uma transforma¸˜o que superp˜e o VCS ao WC, usando as transforma¸˜es geom´tricas j´
ca o co e a
vistas. A seq¨ˆncia de transforma¸˜es ´ dada por:
ue co e
1. translada o VRP para a origem do WC .
2. Aplica rota¸˜es para alinhar os eixos do VCS (xv , yv , zv ) com os eixos do WC (xw , yw , zw ), respec-
co
tivamente.
Se as coordenadas do ponto VRP em WC s˜o dadas por (x0 , y0 , z0 ), a matriz de transla¸˜o ´ dada por
a ca e
T (−x0 , −y0 , −z0 ). A seq¨ˆncia de rota¸˜es pode exigir at´ trˆs rota¸˜es em torno dos eixos coordenados,
ue co e e co
dependo da dire¸˜o escolhida para N . Em geral, se N n˜o est´ alinhado com qualquer um dos eixos, a
ca a a
superposi¸˜o de ambos os sistemas vai exigir uma seq¨ˆncia Rz · Ry · Rx . Isto ´, primeiro rotacionamos
ca ue e
em torno do eixo xw para trazer o eixo zv para o plano xw zw . Em seguida, rotacionamos em torno do
eixo yw para alinhar os eixos zw e zv . A rota¸˜o final em torno do eixo zw ´ para alinhar os eixos yw e
ca e
yv . A matriz de transforma¸˜o composta ´ ent˜o aplicada a todas as descri¸˜es de objetos no WC para
ca e a co
transform´-las para VCS.
a
Uma forma alternativa de gerar a matriz que descreve as transforma¸˜es de rota¸˜o necess´rias ´
co ca a e
calcular os vetores unit´rios u, v e n do sistema de coordenadas de observa¸˜o, e formar a matriz
a ca
de composi¸˜o diretamente, uma vez que esses vetores s˜o ortogonais entre si e definem uma matriz
ca a
ortogonal. Dados os vetores N e V , os vetores unit´rios podem ser calculados da seguinte forma:
a
N
n= = (n1 , n2 , n3 ) (6.1)
|N |
V ×N
u= = (u1 , u2 , u3 ) (6.2)
|V × N |
v = n × u = (v1 , v2 , v3 ) (6.3)
Este m´todo tamb´m ajusta automaticamente a dire¸˜o de V de forma que v seja perpendicular a n.
e e ca
A matriz de rota¸˜o composta para a transforma¸˜o de visualiza¸˜o ´ ent˜o dada por:
ca ca ca e a
u1 u2 u3 0
v1 v2 v3 0
R= (6.4)
n1 n2 n3 0
0 0 0 1
A matriz de transforma¸˜o completa a ser aplicada aos objetos da cena para transferi-los para o
ca
sistema de coordenadas de observa¸˜o ´ dada por:
ca e
u1 u2 u3 −x0
v1 v2 v3 −y0
Mwc,vc =R·T = (6.5)
n1 n2 n3 −z0
0 0 0 1
72](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-73-320.jpg)
![6.3 Proje¸˜es
co
Tendo os objetos descritos no sistema de coordenadas de observa¸˜o, pode-se projetar os objetos tridi-
ca
mensional no plano de observa¸˜o. No processo de gera¸˜o da imagem de uma cena deparamos com o
ca ca
problema de apresentar uma entidade tridimensional num meio bidimensional (2D), que ´ a tela do moni-
e
tor de v´ıdeo. Esse processo, denominado de Proje¸˜o, tem sido tratado exaustivamente por desenhistas,
ca
artistas e arquitetos que buscaram t´cnicas e artif´
e ıcios para sistematiz´-lo e solucion´-lo. A figura 6.6
a a
apresenta uma taxonomia dos m´todos de proje¸˜o.
e ca
Figura 6.6: Taxomia de proje¸˜es [Plastock and Kalley, 1999].
co
6.3.1 Proje¸˜o Perspectiva
ca
As t´cnicas utilizadas em proje¸˜o perspectiva s˜o derivadas daquelas utilizadas pelos artistas e dese-
e ca a
nhistas profissionais. Pode-se dizer que o olho do observador coloca-se no centro de proje¸˜o, e o plano
ca
que deve conter o objeto ou cena projetada transforma-se no plano de proje¸˜o. Dois segmentos de reta
ca
que saem do centro de proje¸˜o e atingem o objeto projetado no plano de proje¸˜o, s˜o chamadas de
ca ca a
projetantes (veja a Figura 6.7)
Figura 6.7: Linha AB e sua proje¸˜o A’B’: (a) perspectiva; (b) ortogonal.
ca
Os desenhos em perspectiva s˜o caracterizados pelo encurtamento perspectivo e pelos pontos de fuga.
a
O encurtamento perspectivo, ´ a ilus˜o de que os objetos e comprimentos s˜o cada vez menores ` medida
e a a a
que sua distˆncia ao centro de proje¸˜o aumenta. Tem-se tamb´m a ilus˜o de que conjuntos de linhas
a ca e a
paralelas que n˜o s˜o paralelas ao plano de proje¸˜o, convergem para um ponto de fuga. Denominam-se
a a ca
73](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-74-320.jpg)

![Figura 6.10: Proje¸˜es perspectivas com 3 pontos de fuga ( o plano de proje¸˜o intercepta os 3 eixos).
co ca
Em particular, um segmento de reta que une um ponto situado ` frente do observador a um ponto
a
situado atr´s dele e efetivamente projetado segundo uma linha quebrada de comprimento infinito.
a
Figura 6.11: A esfera B ´ bem maior que a esfera A, por´m ambas aparecem com o mesmo tamanho
e e
quando projetadas no plano de vis˜o.
a
Desenvolvimento Matem´tico para Proje¸˜es Perspectivas
a co
Para obter uma proje¸˜o perspectiva de um objeto 3D, s˜o transformados os pontos ao longo dos pro-
ca a
jetores que se encontram no centro de proje¸˜o. Suponha que o centro de proje¸˜o est´ posicionado
ca ca a
em zprp, um ponto no eixo zv, e que o plano de proje¸˜o, normal ao eixo z, est´ posicionado em zvp,
ca a
como mostra a Figura 6.13. Precisamos determinar as coordenadas (xp , yp , zp ), que s˜o as coordenadas
a
do ponto P = (x, y, z) projetado no plano de proje¸˜o. Podemos escrever as equa¸˜es que descrevem as
ca co
coordenadas (x , y , z ) de qualquer ponto ao longo da linha de proje¸˜o perspectiva como:
ca
x = x − xu
y = y − yu
z = z − (z − zprp )u (6.6)
O parˆmetro u assume valores no intervalo [0, 1] quando u = 0, estamos em P = (x, y, z), e quando
a
u = 1 temos exatamente o centro de proje¸˜o (0, 0, zprp ). As proje¸˜es perspectiva e paralela tamb´m
ca co e
podem, assim como as transforma¸˜es geom´tricas b´sica, ser definidas atrav´s de matrizes 4x4, o que ´
co e a e e
interessante para a composi¸˜o de transforma¸˜es juntamente com a proje¸˜o. No plano de observa¸˜o,
ca co ca ca
sabemos que z = zvp , e podemos resolver a equa¸˜o de z’ para obter o valor do parˆmetro u nessa posi¸˜o
ca a ca
ao longo da linha de proje¸˜o:
ca
Zvp − z
u= (6.7)
Zprp − z
75](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-76-320.jpg)
![Figura 6.12: Confus˜o visual da perpectiva (objeto atr´s do centro de proje¸˜o).
a a ca
Figura 6.13: Proje¸˜o em perspectiva de um ponto P=(x, y, z) na posi¸˜o (xp, yp, zp) sobre o plano de
ca ca
proje¸˜o [Hearn and Baker, 1994].
ca
Substituindo esse valor de u nas equa¸˜es de z e y , obtemos as equa¸˜es de transforma¸˜o perspectiva:
co co ca
Zvp − z dp
xp = x =x
Zprp − z Zprp − z
Zvp − z dp
yp = y =y (6.8)
Zprp − z Zprp − z
Usando coordenadas homogˆneas pode-se escrever a transforma¸˜o na forma matricial:
e ca
1 0 0 0
xh x
yh 0 1 0 0 y
= 0 0 − zvp zprp · (6.9)
zh dp −zvp dp z
z rp
h 0 0 − d1
p
− pp
d
1
Nesta representa¸˜o o fator homogˆneo ´
ca e e
zprp − z
h= (6.10)
dp
E as coordenadas do ponto projetado no plano de observa¸˜o s˜o obtidas a partir das coordenadas
ca a
homogˆneas dividindo-se por h:
e
xh
xp =
h
yh
yp = (6.11)
h
Observa-se que o valor original da coordenada z precisa ser mantido nas coordenadas de proje¸˜o
ca
para uso por algoritmos de remo¸˜o de linhas ocultas. Em geral, o centro da proje¸˜o n˜o precisa ser
ca ca a
76](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-77-320.jpg)
![posicionado ao longo do eixo zv , e as equa¸˜es acima podem ser generalizadas para considerar o centro
co
em um ponto qualquer. Existem v´rios casos especiais a serem considerados para as equa¸˜es acima.
a co
Por exemplo, se o plano de proje¸˜o coincide com o plano uv, i.e., zvp = 0, ent˜o dp = zprp . Em alguns
ca a
pacotes gr´ficos ´ assumido que o centro de proje¸˜o coincide com a origem do sistema de coordenadas
a e ca
de observa¸˜o, i.e., nesse caso zprp = 0.
ca
6.3.2 Desenvolvimento Matem´tico para Proje¸˜es Paralelas
a co
Podemos especificar uma proje¸˜o paralela com um vetor de proje¸˜o que define a dire¸˜o dos projeto-
ca ca ca
res. Quando a dire¸˜o proje¸˜o ´ perpendicular ao plano de proje¸˜o tem-se uma proje¸˜o ortogr´fica,
ca ca e ca ca a
caso contr´rio tem-se uma proje¸˜o obl´
a ca ıqua. Proje¸˜es ortogr´ficas s˜o muito comuns em engenharia e
co a a
arquitetura para gerar vistas frontais, laterais e traseiras de objetos. A deriva¸˜o das equa¸˜es de trans-
ca co
forma¸˜o para uma proje¸˜o paralela ortogr´fica ´ imediata. Se o plano de observa¸˜o est´ posicionado
ca ca a e ca a
em zvp ao longo do eixo zv , ent˜o a descri¸˜o de qualquer ponto P = (x, y, z) em coordenadas do sistema
a ca
de observa¸˜o ´ transformada para as coordenadas de proje¸˜o (veja Figura 6.14):
ca e ca
Figura 6.14: Proje¸˜o ortogonal de um ponto no plano de proje¸˜o [Hearn and Baker, 1994].
ca ca
A matriz de transforma¸˜o para coordenadas homogˆneas ´ dada por:
ca e e
1 0 0 0
0 1 0 0
Mortograf = (6.12)
0 0 0 0
0 0 0 1
77](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-78-320.jpg)
![Cap´
ıtulo 7
Recorte de Primitivas 2D
J´ vimos que um “pacote gr´fico” atua como intermedi´rio entre o aplicativo (e o seu modelo/estrutura de
a a a
dados interna) e o hardware de visualiza¸˜o. Sua fun¸˜o ´ aproximar primitivas matem´ticas (“ideais”),
ca ca e a
descritas em termos de v´rtices num sistema de coordenadas cartesianas, por conjuntos de pixels com a
e
cor ou n´ de cinza apropriado. Estes pixels s˜o armazenados num bitmap na mem´ria da CPU, ou num
ıvel a o
frame buffer (mem´ria de imagem no controlador do dispositivo. At´ o momento estudamos, de maneira
o e
n˜o extensiva, alguns algoritmos b´sicos para convers˜o matricial utilizados por pacotes gr´ficos. Vamos
a a a a
estudar agora alguns algoritmos para clipping [recorte] de primitivas. (O “recorte” ´ necess´rio para que
e a
a imagem “apare¸a” dentro do retˆngulo de visualiza¸˜o definido para ela.
c a ca
Existem v´rias abordagens para o processo de clipping. Uma t´cnica ´bvia ´ recortar a primi-
a e o e
tiva antes da convers˜o matricial, calculando analiticamente suas intersec¸˜es com o retˆngulo de re-
a co a
corte/visualiza¸˜o [clip rectangle]. Estes pontos de intersec¸˜o s˜o ent˜o usados para definir os novos
ca ca a a
v´rtices para a vers˜o recortada da primitiva. A vantagem, evidente, ´ que o processo de convers˜o
e a e a
matricial precisa tratar apenas da vers˜o recortada da primitiva, cuja ´rea pode ser muito menor que a
a a
original. Esta ´ a t´cnica mais freq¨entemente utilizada para recortar segmentos de reta, retˆngulos e
e e u a
pol´ıgonos, e os algoritmos que vamos estudar s˜o baseados nesta estrat´gia.
a e
Outra estrat´gia seria converter todo o pol´
e ıgono, mas tra¸ar apenas os pixels vis´
c ıveis no retˆngulo de
a
visualiza¸˜o [scissoring]. lsto pode ser feito checando as coordenadas de cada pixel a ser escrito contra
ca
os limites do retˆngulo. Na pr´tica, existem maneiras de acelerar o processo que evitam o teste de cada
a a
pixel individualmente. Se o teste dos limites puder ser feito rapidamente [por hardware especializado,
por exemplo], esta abordagem pode ser mais eficiente que a anterior, e tem a vantagem de ser extens´ ıvel
a regi˜es de recorte arbitr´rias.
o a
7.1 Recorte de segmentos de reta
Figura 7.1: Exemplos de recorte de segmentos de reta.
Vamos estudar especificamente o processo de recorte de segmentos de reta contra retˆngulos. Segmen-
a
tos que interceptam uma regi˜o de recorte retangular, depois de recortados, s˜o sempre transformados
a a
num unico segmento. Segmentos que est˜o sobre a fronteira do retˆngulo de recorte s˜o considerados
´ a a a
como dentro dele, e portanto devem ser mostrados (Figura 7.1).
78](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-79-320.jpg)
![7.1.1 Recorte de Pontos Extremos
Antes de discutir o problema do recorte de segmentos de reta, vamos considerar o problema mais simples
de recortar pontos extremos. Se a fronteira do retˆngulo de recorte tem coordenada x no intervalo xmin
a
e xmax , e coordenada y no intervalo ymin e ymax , ent˜o 4 desigualdades precisam ser satisfeitas para que
a
um ponto (x, y) esteja dentro do retˆngulo de recorte:
a
xmin ≤ x ≤ xmax
ymin ≤ y ≤ ymax (7.1)
7.1.2 Algoritmo de Cohen-Sutherland para Recorte de Segmentos de Reta
Para recortar um segmento de reta, precisamos considerar apenas os seus pontos extremos, e n˜o os a
infinitos pontos no interior. Se ambas as extremidades est˜o dentro do retˆngulo de visualiza¸˜o (AB na
a a ca
Figura 7.1), toda a linha est´ dentro do retˆngulo e pode ser tra¸ada (neste caso diz-se que a reta foi
a a c
trivialmente aceita). Se apenas uma das extremidades est´ dentro (CD na Figura 7.1), a linha intercepta
a
o retˆngulo de visualiza¸˜o, e o ponto de intersec¸˜o precisa ser calculado. Se ambas as extremidades
a ca ca
est˜o fora, a linha pode ou n˜o interceptar o retˆngulo, e precisamos verificar se as intersec¸˜es existem
a a a co
e onde est˜o.a
Uma estrat´gia de for¸a bruta seria checar a linha contra cada aresta do retˆngulo de visualiza¸˜o, para
e c a ca
localizar um eventual ponto de intersec¸˜o. Se existe um, a linha corta o retˆngulo, e est´ parcialmente
ca a a
dentro dele. Para cada linha e cada aresta do retˆngulo, tomamos as duas retas (matematicamente
a
infinitas) que as cont´m, e calculamos a intersec¸˜o entre elas. A seguir, testamos se este ponto ´ interior
e ca e
- ou seja, se est´ dentro do retˆngulo de visualiza¸˜o e da linha. Se este ´ o caso, existe uma intersec¸˜o
a a ca e ca
com o retˆngulo de visualiza¸˜o. Na Figura 7.1, os pontos de intersec¸˜o G e H s˜o interiores, mas I
a ca ca a
e J n˜o s˜o.
a a
Nesta abordagem, precisamos resolver duas equa¸˜es simultˆneas usando multiplica¸˜o e divis˜o para
co a ca a
cada par < aresta, linha >. Entretanto, este ´ um esquema bastante ineficiente, que envolve quantidade
e
consider´vel de c´lculos e testes, e portanto deve ser descartado.
a a
O algoritmo de Cohen-Sutherland ´ mais eficiente, e executa testes iniciais na linha para determinar
e
se c´lculos de intersec¸˜o podem ser evitados. Primeiramente, verifica pares de pontos extremos. Se a
a ca
linha n˜o pode ser trivialmente aceita, s˜o feitas verifica¸˜es por regi˜es. Por exemplo, duas compara¸˜es
a a co o co
simples em x mostram que ambos os pontos extremos da linha EF na Figura 7.1 tˆm coordenada x menor
e
que xmin, e portanto est˜o na regi˜o a esquerda do retˆngulo de visualiza¸˜o (ou seja, fora do semi-plano
a a a ca
definido pela aresta esquerda). A consequˆncia ´ que o segmento EF pode ser trivialmente rejeitado, e
e e
n˜o precisa ser recortado ou tra¸ado. Da mesma forma, podemos rejeitar trivialmente linhas com ambos
a c
os extremos em regi˜es a direita de xmax , abaixo de ymin e acima de ymax . Se o segmento n˜o pode ser
o a
trivialmente aceito ou rejeitado, ele ´ subdividido em dois segmentos por uma aresta de recorte, um dos
e
quais pode ser trivialmente rejeitado. Dessa forma, um segmento ´ recortado interativamente testando-se
e
aceita¸˜o ou rejei¸˜o trivial, sendo subdividido se nenhum dos dois testes for bem-sucedido, at´ que o
ca ca e
segmento remanescente esteja totalmente contido no retˆngulo ou totalmente fora dele.
a
Para executar os testes de aceita¸˜o ou rejei¸˜o trivial, as arestas do retˆngulo de visualiza¸˜o s˜o
ca ca a ca a
estendidas de forma a dividir o plano do retˆngulo de visualiza¸˜o em 9 regi˜es [Figura 7.2]. A cada
a ca o
regi˜o ´ atribu´ um c´digo de 4 bits, determinado pela posi¸˜o da regi˜o com rela¸˜o aos semi-planos
a e ıdo o ca a ca
externos `s arestas do retˆngulo de recorte. Uma maneira eficiente de calcular os c´digos resulta da
a a o
observa¸˜o de que o bit 1 ´ igual ao bit de sinal de (ymax − y); o 2 ´ o bit de sinal de (y − ymin ); o 3 ´ o
ca e e e
bit de sinal de (xmax − x), e o 4 e o de (x − xmin ).
• 1◦ bit: semiplano acima da aresta superior y > ymax
• 2◦ bit: semiplano abaixo da aresta inferior y < ymin
• 3◦ bit: semiplano a direita da aresta direita x > xmax
• 4◦ bit: semiplano a esquerda da aresta esquerda x < xmin
A cada extremidade do segmento de reta ´ atribu´ o c´digo da regi˜o a qual ela pertence. Esses
e ıdo o a
c´digos s˜o usados para determinar se o segmento est´ completamente dentro do retˆngulo de visualiza¸˜o
o a a a ca
ou em um semiplano externo a uma aresta. Se os 4 bits dos c´digos das extremidades s˜o iguais a zero,
o a
ent˜o a linha est´ completamente dentro do retˆngulo. Se ambas as extremidades estiverem no semi plano
a a a
externo a uma aresta em particular, como para EF na Figura 7.1, os c´digos de ambas as extremidades
o
tem o bit correspondente `quela aresta igual a 1. Para EF, os c´digos s˜o 0001 e 1001, respectivamente,
a o a
79](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-80-320.jpg)

![A linha EI requer mais itera¸˜es. O primeiro extremo, E, tem c´digo 0100 e ´ escolhido pelo algoritmo
co o e
como ponto externo. O c´digo ´ testado para obter a primeira aresta que a linha cruza, no caso a aresta
o e
inferior, e EI ´ recortado para FI. Na segunda itera¸˜o, FI n˜o pode ser trivialmente aceito ou rejeitado.
e ca a
O c´digo da primeira extremidade, F, ´ 0000, de forma que o algoritmo escolhe o ponto externo I, cujo
o e
c´digo ´ 1010. A primeira aresta interceptada ´ a superior, resultando no segmento FH. O c´digo de H
o e e o
´ 0010, e a terceira itera¸˜o resulta num corte pela aresta direita. O segmento resultante ´ trivialmente
e ca e
aceito e tra¸ado na quarta itera¸˜o. O Algoritmo 7.1 e 7.2 ilustram este procedimento.
c ca
Este algoritmo n˜o ´ o mais eficiente - como os testes e recorte s˜o executados numa ordem fixa,
a e a
eventualmente ser˜o feitos recortes desnecess´rios. Por exemplo, quando a intersec¸˜o com uma aresta
a a ca
do retˆngulo ´ uma “intersec¸˜o externa”, que n˜o est´ na fronteira do retˆngulo de visualiza¸˜o (ponto
a e ca a a a ca
H na linha EI, Figura 7.4). Existem algoritmos mais eficientes (v. Foley, 3.12), mas este ainda ´ o mais
e
utilizado, por ser simples e bastante conhecido.
typedef enum {LEFT = 0, RIGHT = 1, BOTTOM = 2, TOP = 3} aresta;
typedef enum {TRUE, FALSE} boolean;
typedef boolean outcode;
/* Retorna TRUE se todos os outcodes em codigo sao FALSE, e
* FALSE c.c. */
boolean Vazio(outcode codigo[]);
/* Retorna TRUE se a interseccao logica entre codigo1 e codigo
* 2 e vazia, e FALSE c.c. */
boolean InterseccaoVazia(outcode codigo0[], outcode codigo1 []);
/* Retorna TRUE se codigo0 e codigo 1 sao iguais, e FALSE c.c. */
boolean Igual(outcode codigo0[], outcode codigo1[]);
/* Calcula outcode para ponto (x,y) */
void CalculaOutCode(float x, float y, outcode codigo[]) {
int i;
for (i - LEFT; i < = TOP; i++)
codigo[i] = FALSE;
/* Fim for */
if (y > YMAX)
codigo[TOP] = TRUE;
else if (y < YMIN)
codigo[BOTTOM] = TRUE;
/* Fim se */
if (x > xmax)
codigo[RIGHT] = TRUE;
else if (x < xmax)
codigo[BOTTOM] = TRUE;
/* Fim Se */
}/* End CalculaOutCode */
Algoritmo 7.1: Calculando os c´digos do algoritmo de Cohen-Sutherland.
o
7.2 Recorte de Circunferˆncias
e
Para recortar uma circunferˆncia contra um retˆngulo, podemos primeiro executar um teste de aceita¸˜o/rejei¸˜o
e a ca ca
trivial interceptando a extens˜o da circunferˆncia (um quadrado do tamanho do diˆmetro da circun-
a e a
ferˆncia) com o retˆngulo de visualiza¸˜o usando o algoritmo para recorte de pol´
e a ca ıgonos que ser´ visto a se-
a
guir. Se a circunferˆncia intercepta o retˆngulo, ela ´ subdivida em quadrantes, e testes de aceita¸˜o/rejei¸˜o
e a e ca ca
a ´
trivial s˜o feitos para cada um. Estes testes podem levar a testes por octantes. E poss´ ent˜o calcular
ıvel a
a intersec¸˜o da circunferˆncia e da aresta analiticamente, resolvendo suas equa¸˜es simultaneamente, e
ca e co
a seguir fazer a convers˜o matricial dos arcos resultantes. Se a convers˜o matricial ´ r´pida, ou se a cir-
a a e a
cunferˆncia n˜o ´ muito grande, seria provavelmente mais eficiente usar a t´cnica de scissoring, testando
e a e e
cada pixel na circunferˆncia contra os limites do retˆngulo antes de tra¸´-lo.
e a ca
Um algoritmo para recorte de pol´ ıgonos precisa tratar de muitos casos distintos, como mostra a Figura
7.5. O caso (a) ´ particularmente interessante porque um pol´
e ıgono cˆncavo ´ recortado em dois pol´
o e ıgonos
81](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-82-320.jpg)
![/* algoritmo de recorte de Cohen-Sutherland para linha P0(x0,y0) a
* P1(x1,y1), e retangulo de recorte com diagonal de (xmin,ymin) a
* (xmax,ymax). */
void RecorteLinhaCohenSutherland(float x0,float y0,float x1,float y1,int valor){
boolean aceito, pronto;
outcode outcode0[4], outcode1 [4], *outcode0ut; /* outcodes para P0, P1 e
quaisquer outros pontos que
estao fora do retangulo de
recorte */
float x, y;
aceito = FALSE; pronto = FALSE;
CalculaOutCode(x0,y0,outcode0); CalcuiaOutCode(xl ,y1 ,outcode1);
do {
if (vazio(outcode0) && vazio(outcode1)){
/* aceitacao trivial e sai */
aceito = TRUE;
pronto = TRUE;
}else if (interseccao_vazia(outcode0,outcode1))
/* rejeicao trivial e sai */
pronto = TRUE;
else {
/* ambos os testes falharam, entao calcula o segmento de
reta a recortar: a partir de um ponto externo a uma
interseccao com a aresta de recorte */
/* pelo menos um ponto esta fora do retangulo de recorte;
seleciona-o */
outcode0ut= vazio(outcode0) ? outcode1 : outcode0;
/* acha agora o ponto de interseccao, usando as formulas:
y = y0 + inclinacao * (x-x0), x = x0 + ( 1 /inclinacao) * (y-y0) */
if (outcodeOut(TOP)) {
/* divide a linha no topo do retangulo de recorte */
x= x0 + (x1-x0) * (ymax-y0)/(y1-y0); y= ymax;
}else if (outcode0ut[BOTTOM]) {
/* divide a linha na base do retangulo de recorte */
x = x0 + (x1-x0) + (ymin-y0)/(y1-y0); y = ymin;
}else if (outcode0ut[RIGHT]) {
/* divide a linha na aresta direita do retangulo de recorte */
y = y0 + (y1 -y0) + (xmax-x0)/(x1-x01; x = xmax;
}else if (outcode0ut[LEFT]) {
/* divide a linha na aresta esquerda do retangulo de recorte */
y = y0 + (y 1 -y0) + (xmin-x0)/(x1-x0); x = xmin;
} /* Fim se */
/* agora move o ponto externo para o ponto de interseccao, para
recortar e preparar para o proximo passo */
if (igual(outcode0ut,outcode0)) {
x0 = x; y0 = y; CalculaOutCode(x0,y0,outcode0);
}else{
x1 = x; y1 = y; CalculaOutCode(x1,y1,outcode1);
}
}/* fim do else da subdivisao */
} while (pronto);
if (aceito)
MeioPontoLinhaReal(x0,y0,x1,y1),valor); /* versao do algoritmo para coordenadas reais */
} /* fim do algoritmo de recorte e tracado */
Algoritmo 7.2: Desenhando a linha com o algoritmo de Cohen-Sutherland. Algumas das fun¸˜es
co
usadas est˜o ilustradas no Algoritmo 7.2.
a
82](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-83-320.jpg)


![/* Algoritmo de Sutherland-Hodgman para recorte do pol´gonos */
ı
#define MAX 20
typedef struct {float x,y;} ponto;
typedef ponto vertice;
typedef vertice aresta[2];
typedef vertice VetorVertices[MAX];
typedef enum {TRUE = 1, FALSE = 0} boolean;
/* Acrescenta um novo vertice a vetorSaida, e atualiza tamSaida */
void saida(vertice novoVertice, int *tamSaida, VetorVertices vetorSaida);
/* Checa se o vertice esta dentro ou fora da aresta de recorte */
boolean dentro(vertice testeVertice, aresta arestaRecorte);
/* recorta a aresta (prim,seg) do poligono contra arestaRecorte,
* retorna o novo ponto */
vertice intercepta(vertice prim, vertice seg, aresta arestaRecorte);
void RecortePoligonosSutherlandHodgman(
VetorVertices vetorEntrada, /* vetor de vertices de entrada */
VetorVertices vetorSaida, /* vetor de vertices de saida */
int tamEntrada, /* numero de entradas em vetorEntrada */
int tamSaida, /* numero de vertices em vetorSaida */
aresta arestaRecorte /* aresta do poligono de recorte */){
vertice s, p; /* pontos inicial e final da aresta de recorte corrente */
vertice i; /* ponto de interseccao com uma aresta de recorte */
int j; /* contador para o loop de vertices */
*tamSaida = 0;
s = vetorEntrada[tamEntrada]; / * comeca com o ultimo vertice em vetorEntrada */
for (j = 1 ;j < = tamEntrada;j + + ) {
p= vetorEntrada[j]; /* agora s e p correspondem aos vertices na Fig. */
if (dentro(s,arestaRecorte)) {
/* casos 1 e 4 */
if (dentro(s,arestaRecorte))
saida(p,tamSaida,vetorSaida);
else {
i = intercepta(s,p,arestaRecorte);
saida(i,tamSaida,vetorSaida);
saida(p,tamSaida,vetorSaida);
}/* Fim Se */
}else{
/* casos 2 e 3 */
if (dentro(s,arestaRecorte)) {
i = intercepta(s,p,arestaRecorte);
saida(i,tamSaida,vetorSaida);
}/* Fim Se */
}/*Fim Se */
s = p;
}/* fim do for */
}/* fim do algoritmo de recorte */
Algoritmo 7.3: Algoritmo de Cohen-Sutherland.
85](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-86-320.jpg)



![• pontos em uma curva calculados a partir de incrementos uniformes em x ou y n˜o est˜o distribu´
a a ıdos
uniformemente ao longo da curva, o que afeta a qualidade e precis˜o de uma representa¸˜o gr´fica.
a ca a
Estas limita¸˜es s˜o superadas pelo uso de representa¸˜es param´tricas.
co a co e
Na forma param´trica, cada coordenada de um ponto em uma curva ´ representada como uma fun¸˜o
e e ca
de um unico parˆmetro, sendo que a posi¸˜o de um ponto na curva ´ fixada pelo valor do parˆmetro.
´ a ca e a
Para uma curva 2D que usa t como parˆmetro, as coordenadas cartesianas de um ponto na curva s˜o:
a a
x = x(t)
y = y(t) (8.5)
O vetor que define a posi¸˜o de um ponto na curva ´ portanto dado por
ca e
P (t) = [ x(t) y(t) ] (8.6)
A derivada, ou vetor tangente da curva ´ dada por
e
P (t) = [ x (t) y (t) ] (8.7)
A inclina¸˜o da curva ´ dada por
ca e
dx
dx dt x (t)
= dy
= (8.8)
dy dt
y (t)
Observa¸˜es
co
• A forma param´trica ´ adequada para representar curvas fechadas e com valores m´ltiplos. A forma
e e u
n˜o param´trica pode ser obtida eliminando-se o parˆmetro para obter uma unica equa¸˜o em x e
a e a ´ ca
y.
• Uma vez que um ponto na curva ´ especificado por um unico valor de parˆmetro, a forma pa-
e ´ a
ram´trica ´ independente do sistema de coordenadas. Os extremos e o comprimento da curva s˜o
e e a
fixos pelo intervalo de varia¸˜o do parˆmetro, frequentemente normalizado para , por conveniˆncia.
ca a e
Como as curvas s˜o independentes do sistema de coordenadas, elas s˜o facilmente manipuladas
a a
usando as transforma¸˜es geom´tricas afins (ver Cap´
co e ıtulo 5).
• Determinar um ponto em uma curva, i.e., determinar o valor de y, dado x, ´ trivial no caso da
e
representa¸˜o expl´
ca ıcita. No caso da param´trica, ´ necess´rio obter o valor do parˆmetro t, a partir
e e a a
de x, e a seguir usar este valor para obter y. (Para equa¸˜es param´tricas mais complexas, uma
co e
t´cnica iterativa pode ser mais conveniente).
e
• Ambas as formas de representa¸˜o tˆm vantagens e desvantagens em situa¸˜es espec´
ca e co ıficas!
Exemplos:
1. segmento de reta
Para 2 vetores que especificam as posi¸˜es iniciais P1 e P2, uma representa¸˜o param´trica do
co ca e
segmento ´ dada por
e
Como P (t) ´ um vetor de posi¸˜o, cada um de seus componentes tem uma representa¸˜o param´trica
e ca ca e
x(t) e y(t) entre P 1 e P 2.
2. C´
ırculo no primeiro quadrante
Uma compara¸˜o das representa¸˜es visuais obtidas a partir das formas param´trica e n˜o-param´trica
ca co e a e
para um c´ırculo no primeiro quadrante ´ apresentada na Figura 8.4 (observe que a representa¸˜o
e ca
param´trica para uma curva n˜o ´ unica!)
e a e´
Os pontos na circunferˆncia mostrados nas Figuras 8.4(b) e 8.4(c) foram obtidos com intervalos
e
constantes dos parˆmetros q e t, respectivamente. A primeira representa¸˜o produz comprimentos
a ca
de arcos idˆnticos ao longo da circunferˆncia, ao contr´rio da segunda (a qual, entretanto, tem
e e a
aparˆncia visual melhor que a mostrada em 8.4(a), gerada pela representa¸˜o expl´
e ca ıcita). Por outro
lado, o c´lculo das fun¸˜es trigonom´tricas ´ computacionalmente caro, de maneira que a segunda
a co e e
forma de representa¸˜o param´trica representa um meio termo entre a forma expl´
ca e ıcita e a forma
param´trica padr˜o.
e a
89](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-90-320.jpg)

![Figura 8.6: Fun¸˜es de blending para v´rios valores de n.
co a
para v´rios valores de n. Observe a simetria das fun¸˜es. Examinando-se as Equa¸˜es 8.9 a 8.11 para o
a co co
primeiro ponto na curva, i.e., em t = 0, verifica-se que
Jn,0 (0) = 1 i=0
Jn,i (0) = 0 i=0
(8.12)
Portanto,
P (0) = B0 Jn,0 (0) = B0 (8.13)
e o primeiro ponto na curva coincide com o primeiro ponto do pol´ ıgono de controle. Verifica¸˜o an´loga
ca a
pode ser feita para o ultimo ponto, i.e., em t = 1. As fun¸˜es base da Figura 8.6 ilustram estes resultados.
´ co
Al´m disso, pode-se mostrar que para qualquer valor do parˆmetro t, o somat´rio das fun¸˜es base ´
e a o co e
1, i.e.,
n
Jn,i = 1 (8.14)
i=0
A equa¸˜o para uma curva de B´zier pode ser expressa na forma matricial como
ca e
P (t) = T N G = F G (8.15)
onde F = Jn,0 Jn,1 · · · Jn,n e Gr = B0 B1 · · · Bn .
As matrizes espec´ıficas para valores pequenos de n (n = 3, 4) s˜o de particular interesse. Para qualquer
a
valor de n, a matriz [N] ´ sim´trica em rela¸˜o ` diagonal principal e o canto triangular inferior direito
e e ca a
cont´m apenas zeros.
e
Em geral, uma forma complexa n˜o pode ser modelada por uma unica curva, mas por v´rias curvas
a ´ a
que s˜o conectadas em seus pontos extremos. Ao criar as jun¸˜es, o projetista, em geral, deseja controlar
a co
91](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-92-320.jpg)



![Cap´
ıtulo 11
Cores e Sistemas de Cores
11.1 Percep¸˜o de Cor
ca
A cor ´ o atributo da percep¸˜o visual que pode ser descrito atrav´s dos nomes usados para identificar as
e ca e
cores, como branco, cinza, preto, amarelo, etc., ou da combina¸˜o delas. As diferentes cores, ou espectros
ca
luminosos, que podem ser percebidos pelo sistema visual humano correspondem a uma pequena faixa de
freq¨ˆncias do espectro eletromagn´tico, que inclui as ondas de r´dio, microondas, os raios infravermelhos
ue e a
e os raios X, como mostrado na Figura 11.1.
Figura 11.1: Espectro eletromagn´tico [Gro94].
e
A freq¨ˆncia mais baixa do espectro vis´
ue ıvel corresponde ` cor vermelha (4.3 × 1014 hertz) e a mais
a
14
alta ` cor violeta (7.5 × 10 hertz). Os valores de freq¨ˆncia intermedi´rios correspondem a cores que
a ue a
passam pelo alaranjado e amarelo e por todas as outras cores, at´ chegar nos verdes e azuis. As cores
e
s˜o ondas eletromagn´ticas descritas pelo seu comprimento de onda (l) e especificadas, tipicamente, em
a e
nanˆmetros (nm).
o
Os comprimentos de onda maiores possuem distˆncias focais maiores e, conseq¨entemente, requerem
a u
maior curvatura da lente do olho para serem focalizados, (a cor vermelha possui a maior distˆncia focal
a
e a azul, a menor). A utiliza¸˜o simultˆnea de cores localizadas em extremos opostos do espectro fazem
ca a
com que a lente altere o seu formato constantemente, causando cansa¸o no olho. A vis˜o estereosc´pica
c a o
da cor ´ um efeito relacionado ao processo de focaliza¸˜o da imagem na retina, que faz com que cores
e ca
puras localizadas ` mesma distˆncia do olho pare¸am estar a distˆncias diferentes; por exemplo, a cor
a a c a
vermelha parece estar mais pr´xima e a cor azul parece estar mais distante.
o
Uma fonte de luz (como, por exemplo, o sol ou uma lˆmpada) emite em todas as freq¨ˆncias do
a ue
espectro vis´ ıvel, produzindo a luz branca que incide sobre um objeto. Parte dessa luz ´ absorvida e a outra
e
parte ´ refletida, determinando a cor resultante do objeto. Quando h´ predominˆncia das freq¨ˆncias
e a a ue
baixas, diz-se que o objeto ´ vermelho, ou que a luz percebida possui uma freq¨ˆncia dominante (ou um
e ue
comprimento de onda dominante) na freq¨ˆncia baixa do espectro. A freq¨ˆncia dominante tamb´m ´
ue ue e e
chamada de matiz ou, simplesmente, de cor da luz.
O matiz ´ o atributo de uma sensa¸˜o visual que faz com que uma ´rea pare¸a ser similar a uma
e ca a c
ou 2 das cores percebidas vermelha, amarela, laranja, azul, p´rpura [Hun78]. A partir dessa defini¸˜o,
u ca
pode-se diferenciar a cor crom´tica, que possui matiz, da acrom´tica, que ´ desprovida de matiz. As
a a e
caracter´ ısticas da luz s˜o descritas atrav´s de propriedades como o matiz e as sensa¸˜es de brilho e
a e co
satura¸˜o. O matiz ´ usado para dar um nome a uma cor, o brilho corresponde ao grau de luminˆncia
ca e a
95](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-96-320.jpg)
![de uma cor em rela¸˜o ` luminˆncia de outra ou em rela¸˜o ao fundo, e a satura¸˜o ´ a pureza aparente
ca a a ca ca e
de um matiz. Quanto maior o dom´ ınio de um comprimento de onda, maior ´ a sua satura¸˜o. As cores
e ca
preta, branca e cinza possuem satura¸˜o uniforme em todos os comprimentos de onda e, por isso, s˜o
ca a
diferenciadas apenas pelo brilho. As propriedades de satura¸˜o e de matiz de uma cor s˜o referenciadas
ca a
como cromaticidade.
Algumas pessoas possuem uma anomalia, denominada daltonismo, que impede a distin¸˜o de uma ou
ca
mais cores. O daltonismo se deve a um defeito na constitui¸˜o dos cones e est´ vinculada ao sexo. Ele
ca a
atinge cerca de 8% dos homens, e apenas 0.5% das mulheres. Esse defeito pode se manifestar em 1, 2 ou
nos 3 tipos de receptores. Os tricomatas s˜o daltˆnicos que possuem os 3 sistemas de pigmentos, mas que
a o
utilizam os sistemas em propor¸˜es diferentes das pessoas normais e das pessoas com o mesmo defeito. Os
co
dicromatas percebem as cores defeituosamente porque combinam apenas 2 sistemas. Os monocromatas
percebem apenas gradua¸˜es de claro e de escuro, pois sua estimula¸˜o visual se baseia em um unico
co ca ´
sistema crom´tico. Um outro aspecto que tamb´m influencia na percep¸˜o de cores ´ o amarelamento das
a e ca e
lentes do olho que ocorre com o passar dos anos, fazendo com que as pessoas se tornem menos sens´ ıveis,
por exemplo ` cor amarela do que ` cor azul.
a a
11.2 Sistemas de Cores Prim´rias
a
O conte´do desta se¸˜o, que descreve alguns sistemas de cores prim´rias, foi baseado principalmente em
u ca a
Hearn [Hea94], Cap´ ıtulo 15.
Um sistema de cores ´ um m´todo que explica as propriedades ou o comportamento das cores num
e e
contexto particular. N˜o existe um sistema que explique todos os aspectos relacionados ` cor. Por isso,
a a
s˜o utilizados sistemas diferentes para ajudar a descrever as diferentes caracter´
a ısticas da cor que s˜o a
percebidas pelo ser humano. Existem v´rios sistemas de cores, sendo que ser˜o apresentados apenas
a a
alguns dos principais: o XYZ, o RGB, o HSV e o HLS.
As cores prim´rias s˜o as 2 ou 3 cores que um sistema utiliza para produzir outras cores. As cores
a a
podem ser produzidas a partir de uma combina¸˜o das prim´rias, ou ent˜o, da composi¸˜o de 2 com-
ca a a ca
bina¸˜es. O universo de cores que podem ser reproduzidas por um sistema ´ chamado de espa¸o de cores
co e c
(color space ou color gamut). Alternativamente, um espa¸o de cores (color space) pode ser definido como
c
uma representa¸˜o visual de um modelo de cores, como o cubo definido pelas componentes do modelo
ca
RGB, ou o cone definido pelo modelo HSV. N˜o existe um conjunto finito de cores prim´rias que pro-
a a
duza todas as cores vis´ ıveis, mas sabe-se que uma grande parte delas pode ser produzida a partir de 3
prim´rias.
a
O estudo da utiliza¸˜o de 3 fontes de luz espectral para a gera¸˜o de cores ´ chamado de colorimetria, e
ca ca e
tem como um de seus objetivos determinar espa¸os de cor perceptualmente uniformes. Um espa¸o de cores
c c
(ou sistema de cores) perceptualmente uniforme ´ um no qual distˆncias perceptuais iguais separam todas
e a
as cores. Por exemplo, a escala de cinzas do espa¸o deve transmitir uma transi¸˜o suave entre o preto
c ca
e o branco. A defini¸˜o de um espa¸o de cores uniforme ´ feita atrav´s de medi¸˜es emp´
ca c e e co ıricas obtidas
sob condi¸˜es experimentais rigidamente controladas - as condi¸˜es do ambiente e outros parˆmetros
co co a
importantes devem ser mantidos constantes, como o tamanho das amostras de cores, o espa¸amento c
entre as amostras, a luminˆncia e cromaticidade do fundo e da luz ambiente. Apesar dessa limita¸˜o,
a ca
os espa¸os perceptuais de cores fornecem ferramentas adequadas para a solu¸˜o de problemas como a
c ca
compress˜o de imagens (para decidir o n´
a ıvel de codifica¸˜o da informa¸˜o de cor) e pseudo-colora¸˜o1
ca ca ca
(para mapear as cores da imagem em um conjunto com espa¸amento perceptual m´ximo).
c a
Os sistemas de cores podem ser aditivos ou subtrativos. Nos modelos aditivos (por exemplo, RGB
e XYZ), as intensidades das cores prim´rias s˜o adicionadas para produzir outras cores. A Figura 11.2
a a
ilustra a demonstra¸˜o do funcionamento desses modelos atrav´s da sobreposi¸˜o de c´
ca e ca ırculos coloridos.
Pode-se pensar que o branco ´ a mistura das intensidades m´ximas das 3 cores prim´rias aditivas
e a a
(vermelha, verde e azul). Os matizes intermedi´rios (amarelo, turquesa e magenta) s˜o obtidos atrav´s
a a e
da combina¸˜o das intensidades m´ximas de 2 cores.
ca a
Nos modelos subtrativos (por exemplo, o CMY), as cores s˜o geradas subtraindo-se o comprimento da
a
onda dominante da luz branca, por isso, a cor resultante corresponde ` luz que ´ refletida. A Figura 11.3
a e
ilustra a demonstra¸˜o do funcionamento desses modelos atrav´s da sobreposi¸˜o de c´
ca e ca ırculos coloridos.
Pode-se pensar que o preto ´ a combina¸˜o das 3 cores subtrativas (turquesa, magenta e amarela).
e ca
A quantidade de preto numa cor ´ indicada pela diferen¸a entre o branco e a intensidade m´xima das 3
e c a
cores prim´rias aditivas. E, da mesma forma, a quantidade de branco numa cor ´ indicada pela diferen¸a
a e c
entre o preto e a intensidade m´ ınima das 3 cores prim´rias aditivas.
a
1 A colora¸˜o “falsa” (“pseudocoloring”) ocorre quando as cores “verdadeiras” de uma imagem s˜o mapeadas em outro
ca a
conjunto de cores, ou quando uma imagem adquirida em tons de cinza ´ colorida.
e
96](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-97-320.jpg)
![Figura 11.2: Ilustra¸˜o da mistura de cores aditivas [For94].
ca
Figura 11.3: Ilustra¸˜o da mistura de cores subtrativas [For94].
ca
As cores puras e saturadas n˜o representam toda a classe de cores poss´
a ıveis, existem ainda os tints,
shades e tones que correspondem, respectivamente, `s cores obtidas atrav´s da adi¸˜o de branco, preto e
a e ca
cinza `s cores saturadas, causando uma altera¸˜o no efeito da cor. A Figura 11.42 ilustra de tints, shades
a ca
e tones obtidos a partir da cor vermelha.
Figura 11.4: Ilustra¸˜o da obten¸˜o de tints, shades e tones.
ca ca
A adi¸˜o de branco clareia uma cor e cria um tint (por exemplo, adicionando branco ao vermelho
ca
para obter a cor pink). A adi¸˜o de preto escurece uma cor e cria um shade (por exemplo, adicionando
ca
preto ao vermelho para obter um castanho-avermelhado (maroon). Al´m disso, a adi¸˜o de cinza reduz
e ca
o brilho de uma cor e cria um tone. Uma composi¸˜o monocrom´tica ´ formada inteiramente de tints,
ca a e
shades e tones da mesma cor.
11.3 Modelo XYZ
O sistema XY Z de cores prim´rias da CIE (Comiss˜o Internacional de Ilumina¸˜o) ´ um sistema aditivo
a a ca e
que descreve as cores atrav´s de 3 cores prim´rias virtuais X, Y e Z. Esse sistema foi criado devido `
e a a
inexistˆncia de um conjunto finito de cores prim´rias que produza todas as cores vis´
e a ıveis poss´
ıveis. Nesse
sistema, as cores Cl podem ser expressas pela seguinte equa¸˜o:
ca
Cl = x.X + y.Y + z.Z (11.1)
2 reproduzida de http://www.contrib andrew.cmu.edu:8001/usr/dw4e/color/tints.html.
97](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-98-320.jpg)
![em que X, Y e Z especificam as quantidades das prim´rias padr˜es necess´rias para descrever uma
a o a
cor espectral. A normaliza¸˜o dessa quantidade em rela¸˜o ` luminˆncia (X + Y + Z) possibilita a
ca ca a a
caracteriza¸˜o de qualquer cor. As cores desse sistema podem ser expressas como combina¸˜es das
ca co
quantidades normalizadas abaixo:
X Y Z
x= y= z= (11.2)
X +Y +Z X +Y +Z X +Y +Z
com x + y + z = 1. Assim, qualquer cor pode ser definida apenas pelas quantidades de x e y
que, por dependerem apenas do matiz e da satura¸˜o, s˜o chamadas de coordenadas de cromaticidade.
ca a
A descri¸˜o completa de uma cor ´ dada pelas coordenadas de cromaticidade e pelo valor de um dos 3
ca e
est´
ımulos originais, normalmente do Y , que cont´m a informa¸˜o de luminˆncia. Essa descri¸˜o possibilita
e ca a ca
a obten¸˜o das quantidades de X e Z com as equa¸˜es abaixo:
ca co
x z
X= Y Z= Y (11.3)
y y
onde z = 1 − x − y.
O sistema XYZ ´ formado por cores imagin´rias que s˜o definidas matematicamente. Nesse sistema, as
e a a
combina¸˜es de valores negativos e outros problemas relacionados ` sele¸˜o de um conjunto de prim´rias
co a ca a
reais s˜o eliminados. As coordenadas de cromaticidade x e y permitem representar todas as cores num
a
gr´fico bidimensional. O tra¸ado dos valores normalizados de x e y para as cores no espectro vis´
a c ıvel
resulta na curva ilustrada na Figura 11.5.
Figura 11.5: Diagrama de cromaticidade do CIE [Hea94].
Os pontos que representam as cores puras no espectro eletromagn´tico s˜o rotulados de acordo com os
e a
seus comprimentos de onda e est˜o localizados ao longo da curva que vai da extremidade correspondente
a
a
` cor vermelha at´ a extremidade correspondente ` cor violeta. A linha reta que une os pontos espectrais
e a
vermelho e violeta ´ chamada linha p´rpura, e n˜o faz parte do espectro. Os pontos internos correspondem
e u a
a todas as combina¸˜es poss´
co ıveis de cores vis´
ıveis, e o ponto C corresponde ` posi¸˜o da luz branca.
a ca
Devido ` normaliza¸˜o, o diagrama de cromaticidade n˜o representa os valores de luminˆncia. Por isso,
a ca a a
as cores com luminˆncias diferentes e cromaticidades iguais s˜o mapeadas no mesmo ponto. Atrav´s desse
a a e
diagrama, ´ poss´
e ıvel determinar e comparar os espa¸os de cores dos diferentes conjuntos de prim´rias,
c a
identificar as cores complementares (2 cores que, somadas, produzem a cor branca) e determinar o
comprimento de onda dominante e a satura¸˜o de uma cor.
ca
Os espa¸os de cor s˜o representados no diagrama, ilustrado na Figura 11.6a, atrav´s de linhas retas
c a e
ou de pol´ıgonos. Todas as cores ao longo da linha que une os pontos C1 e C2 na Figura 11.6a podem
ser obtidas atrav´s da mistura de quantidades apropriadas das cores correspondentes a esses pontos. A
e
escala de cores para 3 pontos (por exemplo, C3 , C4 e C5 na Figura 11.6a) ´ representada por um triˆngulo
e a
cujos v´rtices s˜o definidos pelas cores correspondentes `s 3 posi¸˜es e inclui cores contidas no interior e
e a a co
nas margens fronteiri¸as desse triˆngulo.
c a
Observando o diagrama ´ poss´ perceber que nenhum conjunto formado por 3 prim´rias pode gerar
e ıvel a
todas as cores, pois nenhum triˆngulo contido no diagrama abrange todas as cores poss´
a ıveis. As cores
complementares s˜o identificadas por 2 pontos localizados em lados opostos do ponto C e conectados por
a
uma linha reta. Por exemplo, misturando quantidades apropriadas de 2 cores C1 e C2 (Figura 11.6b),
obt´m-se a luz branca.
e
98](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-99-320.jpg)
![Figura 11.6: Representa¸˜o de escalas de cor no diagrama de cromaticidade do CIE [Hea94].
ca
A determina¸˜o do comprimento de onda dominante de uma cor pode ser feita interpretando-se
ca
a escala de cores entre 2 prim´rias. O comprimento de onda dominante da cor C1 , representada na
a
Figura 11.6c, ´ determinado tra¸ando-se uma linha reta que parte do ponto C passando pelo ponto C1 e
e c
intersectando a curva espectral no ponto Cs . A cor C1 , corresponde ent˜o, ` combina¸˜o da luz branca
a a ca
com a cor espectral Cs , pois Cs ´ o comprimento de onda dominante de C1 . O comprimento de onda
e
dominante das cores que est˜o entre o ponto C e a linha p´rpura ´ determinado de outra forma. Tra¸a-se
a u e c
uma linha a partir do ponto C (Figura 11.6c) passando pelo ponto C2 e intersectando a linha p´rpurau
no ponto Cp . Como esse ponto n˜o pertence ao espectro vis´
a ıvel, o ponto C2 ´ referenciado como sendo
e
uma cor n˜o espectral e o seu comprimento de onda dominante ´ obtido atrav´s do prolongamento da
a e e
reta at´ que ela intercepte a curva espectral, no ponto Csp . As cores n˜o espectrais est˜o entre p´rpura
e a a u
e magenta, e s˜o geradas atrav´s da subtra¸˜o do comprimento da onda dominante (como, por exemplo,
a e ca
o Csp ) da luz branca.
A pureza de uma cor (por exemplo, de C1 na figura 11.6c) ´ determinada atrav´s da distˆncia relativa
e e a
do ponto C1 , que corresponde ` linha reta que vai do ponto C at´ o ponto Cs . Pode-se calcular a pureza
a e
do ponto C1 atrav´s da rela¸˜o dc1 , onde dc1 representa a distˆncia entre C e C1 e dcs representa a
e ca dcs a
1
distˆncia entre C e Cs . A cor C1 ´ cerca de 25% pura porque est´ situada a aproximadamente 4 da
a e a
distˆncia total entre C e Cs .
a
11.4 Modelo RGB (Red, Green, Blue)
O sistema RGB de cores prim´rias tamb´m ´ aditivo e est´ baseado na teoria dos 3 est´
a e e a ımulos (Tristimulus
Color Theory) proposta por Young-Helmholtz e discutida na se¸˜o 2.3. Segundo essa teoria, o olho
ca
humano percebe a cor atrav´s da estimula¸˜o dos 3 pigmentos visuais presentes nos cones da retina, que
e ca
possuem picos de sensibilidade aproximada nos seguintes comprimentos de onda: 630 nm (Vermelho-
Red ), 530 nm (Verde-Green) e 450 nm (Azul-Blue). Esse sistema pode ser representado graficamente
atrav´s do cubo unit´rio definido sobre os eixos R, G e B, como ilustrado na Figura 11.7.
e a
A origem representa a cor preta, o v´rtice de coordenadas (1, 1, 1) representa a cor branca, os v´rtices
e e
que est˜o sobre os eixos representam as cores prim´rias e os demais v´rtices representam o complemento
a a e
de cada cor prim´ria. Cada ponto no interior do cubo corresponde a uma cor que pode ser representada
a
pela tripla (R, G, B), com os valores R, G e B variando de 0 a 1. Os tons de cinza s˜o representados ao
a
longo da diagonal principal do cubo, que vai da origem (ponto correspondente a cor preta) at´ o v´rtice
e e
que corresponde ` cor branca. Cada tom ao longo dessa diagonal ´ formado por contribui¸˜es iguais de
a e co
cada prim´ria. Logo, um tom de cinza m´dio entre o branco e o preto ´ representado por (0.5, 0.5, 0.5).
a e e
As cores Cl desse sistema podem ser expressas na forma:
Cl = r.R + g.G + b.B (11.4)
A resposta do olho aos est´
ımulos espectrais n˜o ´ linear e, por isso, algumas cores n˜o podem ser
a e a
reproduzidas pela sobreposi¸˜o das 3 prim´rias. Isso significa que algumas cores existentes na natureza
ca a
n˜o podem ser mostradas nesse sistema. Por isso, um fenˆmeno natural colorido como, por exemplo, de
a o
forma¸˜o de rochas, n˜o pode ser reproduzido com precis˜o (conforme discutido em Wolf [Wol93]).
ca a a
99](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-100-320.jpg)
![Figura 11.7: Cubo do RGB [Fol96].
11.5 Modelo HSV (Hue, Saturation, Value)
O sistema HSV utiliza descri¸˜es de cor que s˜o mais intuitivas do que combina¸˜es de um conjunto
co a co
de cores prim´rias e, por isso, ´ mais adequado para ser usado na especifica¸˜o de cores em n´
a e ca ıvel de
interface com o usu´rio. A cor ´ especificada atrav´s de uma cor espectral e das quantidades de branco e
a e e
preto que ser˜o adicionadas para a obten¸˜o de shades, tints e tones diferentes. A representa¸˜o gr´fica
a ca ca a
tridimensional do sistema HSV ´ um cone de 6 lados derivado do cubo RGB, mostrado na figura 11.8.
e
Figura 11.8: Cone hexagonal do HSV [Fol96].
Os parˆmetros de cor utilizados nesse sistema s˜o o matiz (hue), a satura¸˜o (saturation) e a lu-
a a ca
minˆncia (value). Os v´rios matizes est˜o representados na parte superior do cone, a satura¸˜o ´ medida
a a a ca e
ao longo do eixo horizontal e a luminˆncia ´ medida ao longo do eixo vertical, que passa pelo centro do
a e
cone. O matiz, que corresponde `s arestas ao redor do eixo vertical, varia de 0◦ (vermelho) a 360◦ , e o
a
ˆngulo entre os v´rtices ´ de 60◦ . A satura¸˜o varia de 0 a 1 e ´ representada como sendo a raz˜o entre
a e e ca e a
a pureza de um determinado matiz e a sua pureza m´xima (S = 1). Um determinado matiz possui 1
a 4
de pureza em S = 0.25. Quando S = 0 tem-se a escala de cinzas. A luminˆncia varia de 0 (no pico do
a
cone), que representa a cor preta, a 1 (na base), onde as intensidades das cores s˜o m´ximas.
a a
11.6 Modelo HLS (Hue, Lightness, Saturation)
O sistema HLS3 tamb´m ´ baseado em parˆmetros mais intuitivos para a descri¸˜o de cores.
e e a ca
A representa¸˜o gr´fica tridimensional desse sistema ´ um cone duplo, como mostra a figura 9. Os 3
ca a e
parˆmetros de cor utilizados s˜o o matiz (hue), a luminosidade (lightness 4 ) e a satura¸˜o (saturation).
a a ca
3 Outros autores denominam esse sistema como Hue, Luminance, Saturation [Rog93a].
4 Luminosidade (lightness): Segundo Foley [Fol96], esse termo est´ relacionado ` no¸˜o acrom´tica da intensidade per-
a a ca a
cebida de um objeto que reflete luz. Brilho (brightness) ´ usado no lugar de luminosidade para denotar a intensidade
e
percebida de um objeto que emite luz.
100](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-101-320.jpg)
![Figura 11.9: Cone duplo do HLS [Fol96].
O ˆngulo em rela¸˜o ao eixo vertical varia de 0◦ (matiz azul) a 360◦ em intervalos de 60◦ e especifica
a ca
um matiz. O eixo vertical corresponde ` luminosidade e varia de 0 (preto) a 1 (branco) e ´ onde se
a e
encontra a escala de cinzas. A satura¸˜o varia de 0 a 1, e os matizes puros s˜o encontrados no plano
ca a
onde a luminosidade ´ igual a 0.5 e a satura¸˜o ´ igual a 1. Quanto menor o valor da satura¸˜o menor ´
e ca e ca e
a pureza do matiz; e quando a satura¸ao ´ igual a 0, tem-se a escala de cinzas.
c˜ e
Os sistemas HLS e HSV permitem que se pense em termos de cores mais “claras” e mais “escuras”. As
cores s˜o especificadas atrav´s de um ˆngulo, e os diversos shades, tints, e tones de cada cor s˜o obtidos
a e a a
atrav´s do ajuste do brilho ou luminosidade e da satura¸˜o. As cores mais claras s˜o obtidas atrav´s do
e ca a e
aumento do brilho ou da luminosidade e as cores mais escuras pela diminui¸˜o dos mesmos. As cores
ca
intermedi´rias s˜o obtidas atrav´s da diminui¸˜o da satura¸˜o.
a a e ca ca
101](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-102-320.jpg)
![Cap´
ıtulo 12
Processamento Digital de Imagens
12.1 Introdu¸˜o
ca
A ´rea de Processamento Digital de Imagens tem crescido consideravelmente nas ultimas duas d´cadas,
a ´ e
com a utiliza¸˜o de imagens e gr´ficos em uma grande variedade de aplica¸˜es, aliado ao fato de que
ca a co
a tecnologia de constru¸˜o de computadores tamb´m tem se aprimorado, possibilitando a utiliza¸˜o de
ca e ca
sistemas mais eficientes e mais baratos. Muitas ´reas vˆm utilizando Sistemas de Processamento Digital
a e
de Imagens, tais como: reconhecimento de padr˜es (ind´stria), medicina, agricultura, pesquisas espaciais,
o u
meteorologia, etc.
12.2 Considera¸˜es Sobre Imagens
co
Uma imagem cont´
ınua, ´ digitalizada atrav´s de dois processos:
e e
• Amostragem (Sampling): digitaliza¸˜o em termos espaciais (tamanho da grade de digitaliza¸˜o);
ca ca
• Quantiza¸˜o: digitaliza¸˜o em termos de amplitude (no de n´
ca ca ıveis de cinza).
A Figura 12.1, ilustra o processo de quantiza¸˜o, para v´rios tamanhos de grade. A Figura ??,
ca a
apresenta uma imagem de 512x512 pixels, quantizada de v´rias formas.
a
Matematicamente, Imagem Digital pode ser definida como uma fun¸˜o bidimensional A(x, y) definida
ca
em uma certa regi˜o do plano.
a
A : [0, r] × [0, s] → [0, t] (12.1)
Assim a imagem ´ definida num retˆngulo [0, r]×[0, s], e os valores tomados est˜o contidos no intervalo
e a a
[0, t]. Ao valor A(x, y) no ponto (x, y) d´-se o nome de N´ de cinza.
a ıvel
Imagens s˜o geralmente definidas como uma grande cole¸˜o de dados, que est˜o frequentemente
a ca a
dispostos em forma de uma matriz ou alguma outra estrutura de dados discreta.
Uma imagem, ´ representada atrav´s de um conjunto de valores, onde cada valor ´ um n´mero que
e e e u
descreve os atributos de um pixel na imagem. Usualmente estes n´meros s˜o inteiros positivos, que
u a
representam a intensidade na escala de tons de cinza de um ponto da imagem, ou a cor associada ao
ponto pela “look-up table”, em sistemas que comportam este procedimento. Quando utiliza-se escalas de
tons de cinza, usualmente associa-se a tonalidade de cinza mais escura, o preto, ao n´ zero da escala de
ıvel
cinza, e o mais claro, o branco, ao maior valor permitido na escala. Ou seja, se cada pixel ´ representado
e
em um sistema de 8-bits, o preto ´ associado ao valor zero, e o branco ao valor 255.
e
As dimens˜es do conjunto de valores que especifica a imagem s˜o chamadas de largura e altura da
o a
imagem, e o n´mero de bits associado com cada pixel da matriz ´ chamado de profundidade da imagem.
u e
A profundidade da imagem est´ associada ao n´mero de planos de mem´ria em que uma imagem ´
a u o e
mapeada, sendo que cada bit da palavra que armazena o valor do pixel reside em um plano da imagem
(“frame buffer”). Na Figura 12.3 mostra-se um esquema de um pixel p com profundidade 8.
Atrav´s de Processamento Digital de Imagens, pode-se analisar e modificar imagens por computador.
e
Os objetivos deste processamento s˜o: a
1. Extrair informa¸˜o da imagem, ou seja, reconhecer elementos que comp˜em a imagem, permitir
ca o
medir elementos contidos na imagem, classific´-los e compar´-los com algum modelo colocado.
a a
102](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-103-320.jpg)


![Figura 12.4: Organiza¸˜o de uma LUT, para um sistema de pixels de 8 bits.
ca
1. Opera¸˜es Pontuais: onde o n´
co ıvel de cinza de um ponto na imagem transformada depende s´ o
do n´
ıvel de cinza do ponto da imagem original (ou nas imagens originais se houver mais de uma
imagem de entrada (“frames”)).
2. Opera¸˜es Locais: onde o novo n´ de cinza de um ponto depende n˜o s´ de seu antigo n´
co ıvel a o ıvel
de cinza, mas tamb´m dos n´
e ıveis de cinza de seus pontos vizinhos.
12.5.1 Opera¸˜es Pontuais sobre Imagens
co
Algoritmos que realizam Opera¸˜es Pontuais percorrem a imagem e utilizam o valor do pixel associado
co
a cada ponto, modificando a escala de tonalidades de cinza de uma imagem. Por exemplo caso deseja-se
tornar uma imagem mais brilhante, pode-se adicionar algum valor a todos os pontos da imagem. Por
exemplo, em um sistema de 8-bits por pixel, os valores associados v˜o de 0 a 255, pode-se definir uma
a
fun¸˜o brilho(p) = p + 40, cuja fun¸˜o ´ tornar a imagem mais “clara”. Atrav´s de opera¸˜es pontuais
ca ca e e co
pode-se tamb´m corrigir sombras que porventura tenham surgido junto com o processo de aquisi¸˜o da
e ca
imagem. Ou seja, define-se uma fun¸˜o cujo efeito reverta a opera¸˜o de sombreamento indesej´vel,
ca ca a
por´m isto requer que se estime as fun¸˜es de sombreamento.
e co
Assim, uma opera¸˜o pontual que toma uma imagem A(x, y) e produz outra imagem B(x, y), pode
ca
ser definida matematicamente como:
B(x, y) = f [A(x, y)] (12.2)
Histogramas de Intensidades
O Histograma de Intensidades indica para cada n´ ıvel de cinza da imagem a quantidade de pontos
mapeados com tal n´ ıvel. Ele cont´m uma informa¸˜o global sobre os “objetos” da imagem. Se todos os
e ca
pontos da imagem s˜o de um mesmo objeto, o histograma mostra a probabilidade condicional p(z/objeto)
a
de um ponto possuir um dado n´ ıvel de cinza z, sendo que o ponto pertence ao objeto. A Figura 12.5
apresenta uma imagem e seu histograma de intensidades associado.
Atrav´s de Histogramas de Intensidades pode-se obter uma maneira simples para se manipular o
e
contraste de imagens. Dessa forma, pode-se definir as “janelas” de intensidade que se queira manipular.
Por exemplo, se ao construir o histograma de uma imagem vˆ-se que n˜o se est´ utilizando toda a
e a a
abrangˆncia dos n´
e ıveis de cinza, resultando uma imagem com pouco contraste, pode-se for¸ar que ela seja
c
mapeada usando todos os n´ ıveis de cinza, ou uma faixa deles (“janela”), ou mesmo aumentar o contraste
em apenas uma regi˜o dos n´
a ıveis de intensidade da imagem [Gonzalez and Wintz, 1987].
Suponha-se uma imagem A(x, y) e seu histograma H1 (A). Se um ponto p da imagem est´ mapeado a
com o n´ N dentro da faixa de valores ∆1 , cujo n´ mais baixo ´ min1 e o mais alto ´ max1 , e atrav´s
ıvel ıvel e e e
de manipula¸˜o no histograma deseja-se transform´-lo para o valor p com n´ N , o qual estar´ dentro
ca a ıvel a
da faixa ∆2 cujo valor m´ ınimo ´ min2 e m´ximo max2 , a fun¸˜o de transforma¸˜o ser´:
e a ca ca a
(N − min1 )(max2 − min2 )
f (N ) = + min2 (12.3)
(max1 − min1 )
N = f (N ) (12.4)
A Figura 12.6 ilustra a transforma¸ao do histograma H1 (A) da imagem A para o histograma H2 (A).
c˜
105](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-106-320.jpg)

![Figura 12.6: Efeito de uma transforma¸˜o dos n´
ca ıveis de cinza efetuado sobre o histograma.
Figura 12.7: Manipula¸˜o de janelas de intensidade da imagem atrav´s do histograma.
ca e
Ao se efetuar opera¸˜es sobre as imagens, deve-se estar atento para que o novo valor obtido n˜o
co a
ultrapasse o dom´ınio de valores, permitido pela amplitude dos n´ıveis de intensidade em que a imagem
est´ mapeada. Se este cuidado n˜o for tomado, pode-se obter valores totalmente inconsistentes, levando-se
a a
a uma degenera¸˜o da imagem.
ca
12.5.2 Opera¸˜es Locais Sobre a Imagem
co
Algor´ıtmos que realizam Opera¸˜es Locais utilizam informa¸˜o dos valores dos pontos vizinhos para
co ca
modificar o valor de um ponto, ou mesmo para verificar a existˆncia de alguma propriedade neste ponto
e
da imagem.
Opera¸˜es Locais s˜o tipicamente utilizadas para filtragem espacial e altera¸˜o da pr´pria estrutura
co a ca o
da imagem. Elas podem “agu¸ar” a imagem, acentuando as mudan¸as de intensidades (atrav´s de filtros
c c e
Passa-Altas), ou “suavizar” a imagem, tornando as mudan¸as de intensidade menos abruptas (atrav´s de
c e
filtros Passa-Baixas), ou podem prover outras formas de se melhorar a imagem. Assim, pode-se procurar
formas na imagem atrav´s de “padr˜es de busca” (“match”), obter medidas dos elementos da imagem,
e o
definir bordas na imagem, remover ru´ suavizando a imagem [?].
ıdo
As transforma¸˜es locais s˜o divididas em dois grandes grupos:
co a
• Transforma¸˜es Lineares: s˜o aquelas em que os pixels vizinhos ao que est´ sendo calculado
co a a
influenciam no novo valor segundo uma combina¸˜o linear dos mesmos. Tais opera¸˜es incluem
ca co
superposi¸˜o e convolu¸˜o de imagens, o que ´ usualmente utilizado para implementar filtros dis-
ca ca e
cretos.
• Transforma¸˜es n˜o Lineares: utilizam outra forma de arranjo que n˜o a linear.
co a a
107](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-108-320.jpg)
![Opera¸˜o de Convolu¸˜o
ca ca
Um dos algoritmos cl´ssicos de processamento de imagens ´ aquele que efetua a Convolu¸˜o entre
a e ca
imagens, sendo comumente usado para realizar filtragem espacial e procurar peculiaridades na imagem.
A opera¸˜o de convolu¸˜o substitui o valor de um ponto com o valor obtido atrav´s de uma opera¸˜o
ca ca e ca
linear do ponto e de seus vizinhos, sendo que ´ atribu´ “peso” aos vizinhos e ao ponto. Estes “pesos”
e ıdo
s˜o colocados em uma matriz, usualmente de dimens˜o pequena, chamada de m´scara. Se para obter um
a a a
novo valor de um ponto deseja-se que apenas os vizinhos imediatos influenciem, escolhe-se uma m´scara a
de dimens˜o 3x3, onde o ponto base para a gera¸˜o do novo ponto ´ colocado no centro da m´scara.
a ca e a
Dadas duas imagens A(x, y) e B(x, y), com x = 0, 1, ..., M − 1 e y = 0, 1, ...N − 1, a convolu¸˜o ca
(discreta) destas duas imagens ´ uma terceira imagem C(x, y) com x = 0, 1, ..., M − 1 e y = 0, 1, ..., N − 1,
e
dada pela seguinte express˜o:
a
M −1 N −1
1
C(x, y) = A(m, n).B(x − m, y − n) (12.9)
M.N m=0 n=0
e para os valores da borda da imagem, que se encontram fora dos intervalos [0, M − 1] e [0, N − 1], deve-se
utilizar as seguintes rela¸˜es:
co
A(x, −y) = A(x, N − y) (12.10)
A(−x, y) = A(M − x, y) (12.11)
As rela¸˜es acima s˜o equivalentes a considerar uma imagem A(x, y) definida em [0, M −1] e [0, N −1],
co a
como definida em [−M, M − 1] e [−N, N − 1]. O resultado da convolu¸˜o de A por B num ponto p ´ na
ca e
realidade uma m´dia ponderada dos pontos de A, onde os pesos s˜o dados pela imagem B.
e a
Como foi mencionado acima, a opera¸˜o de convolu¸˜o ´ a base para efetuar-se filtragem espacial
ca ca e
de imagens. A imagem que indica os pesos para a convolu¸˜o normalmente possui dimens˜o pequena e
ca a
´
ımpar (3, 5, 7 ou 9), pois a opera¸˜o de convolu¸˜o envolve uma grande quantidade de c´lculos, e quanto
ca ca a
maior o m´scara maior ser´ o tempo de processamento da opera¸˜o.
a a ca
A seguir ser˜o apresentadas algumas m´scaras normalmente utilizadas para filtragem espacial [Mascarenhas and Vel
a a
1/9 1/9 1/9
1/9 1/9 1/9 (12.12)
1/9 1/9 1/9
Implementa um filtro passa-baixas (de suaviza¸˜o):
ca
0 −1 0
−1 5 −1 (12.13)
0 −1 0
Normalmente utilizada para “agu¸ar” uma imagem, pois como alguns pesos s˜o negativos eles tendem
c a
a real¸ar diferen¸as.
c c
1 1 1 −1 −1 −1
(a) 1 −2 1 (b) 1 −2 1 (12.14)
−1 −1 −1 1 1 1
Apresenta uma m´scara de filtro para dete¸˜o de borda ao (a) norte e (b) ao sul do ponto.
a ca
−1 1 1 1 1 −1
(a) −1 −2 1 (b) 1 −2 −1 (12.15)
−1 1 1 1 1 −1
Apresenta uma m´scara de filtro para dete¸˜o de borda a (a) leste e (b) a oeste do ponto.
a ca
O realce de bordas, independente da dire¸˜o pode ser obtido atrav´s de m´scaras como:
ca e a
0 −1 0 −1 −1 −1 1 −2 1
−1 4 −1 −1 8 −1 −2 4 −2 (12.16)
0 −1 0 −1 −1 −1 1 −2 1
Pode-se tamb´m utilizar m´scaras que contenham algum padr˜o que se quer procurar na imagem.
e a a
Neste caso a m´scara ´ normalmente chamada de tentativa (“template”), onde o tamanho da m´scara
a e a
depende do padr˜o a ser procurado.
a
108](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-109-320.jpg)
![Exemplos de Transforma¸˜es n˜o Lineares
co a
Usualmente as transforma¸˜es n˜o lineares conseguem uma melhor rela¸˜o sinal/ru´ na imagem pro-
co a ca ıdo
duzida do que por transforma¸˜es lineares. Os filtros lineares utilizados para atenuar os ru´
co ıdos de uma
imagem (passa-baixas) produzem uma imagem “borrada”, ou seja as bordas n˜o ficam mais t˜o n´
a a ıtidas.
Este efeito indesejado pode ser minorado atrav´s de transforma¸˜es (filtros) n˜o lineares.
e co a
Figura 12.8: Sinais “ru´
ıdo” (a) e “degrau” (b).
Tome-se como exemplo os sinais unidimensionais dos tipos “ru´ ıdo” e “degrau” mostrados na Figura
12.9 [Mascarenhas and Velasco, 1989]. Os efeitos de uma transforma¸˜o linear (filtro) dos tipos m´dia
ca e
[1/3, 1/3, 1/3] e diferen¸a [−1, 3, −1] s˜o mostrados na Figura 12.9. Pode-se notar nestes casos os efeitos
c a
de atenua¸˜o do ru´ (a), “borramento” da borda (b), amplia¸˜o do ru´ (c) e realce da borda (d).
ca ıdo ca ıdo
Os efeitos indesejados mostrados na Figura 12.10 (c) e (d) podem ser minorados atrav´s de filtros n˜o
e a
lineares, como ser´ visto a seguir.
a
Figura 12.9: Sinais “ru´
ıdo” (a) e “degrau” (b).
Por exemplo, no filtro da mediana, os pontos da vizinhan¸a do ponto (x, y) s˜o ordenados, e tomado
c a
como novo valor para (x, y) o valor mediano obtido pela ordena¸˜o. O efeito do filtro da mediana
ca
(unidimensional) que envolve 3 elementos (o ponto e seus vizinhos mais pr´ximos) ´ mostrado na Figura
o e
109](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-110-320.jpg)
![Figura 12.10: Efeitos de filtros lineares ao “ru´ıdo” e ` “borda”: (a) efeitos de atenua¸˜o; (b) borramento
a ca
da borda; (c) amplia¸˜o do ru´
ca ıdo; (d) realce da borda.
12.11. Note-se que na parte (a) da figura o ru´ foi eliminado (n˜o somente atenuado), enquanto em (b)
ıdo a
o degrau permaneceu inalterado.
Figura 12.11: Efeito do filtro da mediana sobre o “ru´
ıdo” e o “degrau”.
´
E tamb´m usual, em vez de se utilizar a mediana da vizinhan¸a, escolher o valor m´ximo ou o valor de
e c a
ordem qualquer. Se a imagem ´ bin´ria, para se obter o valor m´
e a ınimo entre dois pontos, pode-se utilizar
a opera¸˜o l´gica E dos valores da vizinhan¸a dois a dois, e para o valor m´ximo a opera¸˜o l´gica OU.
ca o c a ca o
Uma outra alternativa utilizada ´ tomar-se o valor mais frequente de uma vizinhan¸a, ou seja, utilizar
e c
a Moda, entre eles.
Pode-se utilizar vizinhan¸a seletiva de um ponto, isto ´, tomar a m´dia n˜o em toda a vizinhan¸a,
c e e a c
mas sim numa sub-vizinhan¸a que satisfa¸a alguma propriedade dada, como uniformidade, ou seja, que
c c
apresente um valor m´dio pr´ximo do valor do ponto (x, y). O uso do filtro da vizinhan¸a seletiva presume
e o c
que a imagem seja composta de regi˜es razoavelmente uniformes. Assim, a sele¸˜o da vizinhan¸a procura
o ca c
fazer com que o ponto (x, y) seja operado s´ com pontos de sua regi˜o.
o a
Pode-se tamb´m utilizar filtros n˜o-lineares para detectar, bordas e linhas curvas. Para o realce
e a
de bordas o m´todo n˜o-Linear mais simples ´ o Operador Gradiente de Roberts (GR), dado por
e a e
[Mascarenhas and Velasco, 1989]:
1
2 2
GR(x, y) = [[A(x, y) − A(x − 1, y − 1)] + [A(x, y − 1) − A(x − 1, y)] ] 2 (12.17)
onde A(x, y) ´ a imagem dada.
e
110](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-111-320.jpg)
![Uma desvantagem do operador de Roberts ´ sua assimetria, pois, dependendo da dire¸˜o, certas
e ca
bordas s˜o mais real¸adas que outras, mesmo tendo igual magnitude.
a c
Um operador gradiente para delimita¸˜o de bordas mais sofisticado (3x3), ´ o Operador de Sobel
ca e
(GS), o qual ´ frequentemente utilizado como o primeiro passo para algoritmos de vis˜o computacional.
e a
Este operador ´ dado por:
e
1
GS(x, y) = (X 2 + Y 2 ) 2 (12.18)
onde:
X = [A(x − 1, y + 1) + 2.A(x, y + 1) + A(x + 1, y + 1)]−
[A(x − 1, y − 1) + 2A(x, y − 1) + A(x + 1, y − 1)]
(12.19)
Y
= [A(x − 1, y − 1) + 2.A(x − 1, y) + A(x − 1, y + 1)]−
[A(x + 1, y + 1) + 2A(x + 1, y) + A(x + 1, y − 1)]
Transforma¸˜es Geom´tricas
co e
As transforma¸˜es geom´tricas mudam o arranjo espacial dos pixels da imagem. Muitas vezes s˜o uti-
co e a
lizadas para corrigir distor¸˜es causadas pelo processo de aquisi¸˜o, ou mesmo para efetuar alguma
co ca
manipula¸˜o solicitada pelo usu´rio. Tranforma¸˜es geom´tricas t´
ca a co e ıpicas s˜o: rota¸˜o, transla¸˜o, am-
a ca ca
plia¸˜o, ou diminui¸˜o da imagem. Algoritmos para efetuarem estas opera¸˜es podem ser apresentados
ca ca co
como um conjunto de equa¸˜es que mapeiam um pixel localizado na posi¸˜o (x, y) em um novo endere¸o,
co ca c
(x , y ).
Na realidade, em processamento digital de imagens, geralmente s˜o necess´rios dois algoritmos se-
a a
parados para a maior parte das transforma¸˜es geom´tricas. O primeiro ´ o algoritmo que define a
co e e
movimenta¸˜o dos pixels, como ele move a partir da posi¸˜o inicial para a posi¸˜o final.
ca ca ca
Figura 12.12: Uma transforma¸˜o geom´trica de 90o graus.
ca e
Como exemplo, pode-se tomar a imagem ilustrada na Figura 12.12. Ali uma imagem ´ rotacionada
e
de 90o graus. Um pixel na posi¸˜o (0,0) ´ mapeado segundo a f´rmula:
ca e o
x = (Y SIZE − 1) − y
y =x (12.20)
onde Y SIZE ´ o n´mero de pixels no eixo y.
e u
Em muitas aplica¸˜es, ´ necess´rio preservar a continuidade dos objetos que definem a imagem. Isso
co e a
pode ser feito transformando-se ponto a ponto a imagem, ou transformando-se apenas pontos chave da
imagem, fazendo que os outros pontos acompanhem a transforma¸˜o por algum outro processo. Pode-se
ca
ver que o primeiro processo ´ geralmente mais oneroso em termos de tempo de computa¸˜o do que o
e ca
segundo.
´
E conveniente especificar matematicamente o relacionamento espacial entre pontos das imagem de
entrada e da imagem de sa´ıda. A defini¸˜o geral para opera¸˜es geom´tricas ´ [Castleman, 1979]:
ca co e e
g(x, y) = f (x , y ) = f (a(x, y), b(x, y)) (12.21)
111](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-112-320.jpg)

![Referˆncias Bibliogr´ficas
e a
[Castleman, 1979] Castleman, K. R. (1979). Digital Image Processing. Prentice-Hall, Inc., Englewood
Cliffs, N.J.
[Gonzalez and Wintz, 1987] Gonzalez, R. C. and Wintz, P. (1987). Digital Imagem Processing. Addison-
Wesley Publishing Company, second edition edition.
[Hearn and Baker, 1994] Hearn, D. and Baker, P. (1994). Computer Graphics. Prentice-Hall.
[Mascarenhas and Velasco, 1989] Mascarenhas, N. D. A. and Velasco, F. R. D. (1989). Processamento
digital de imagens. In IV Escola Brasileiro-Argentina de Inform´tica, Universidade Cat´lica de Santiago
a o
del Estero, Termas do Rio Hondo - Argentina.
[Minghim and Oliveira, 1997] Minghim, R. and Oliveira, M. C. F. (1997). Uma introdu¸˜o ` visualiza¸˜o
ca a ca
computacional xvi jai’97. In XVII Congresso da SBC, volume 1777 of Jornadas de Atualiza¸˜o em
ca
Inform´tica, pages 85–131, Bras´ - Brazil.
a ılia
[Persiano and Oliveira, 1989] Persiano, R. C. M. and Oliveira, A. A. F. (1989). Introdu¸˜o ` Computa¸˜o
ca a ca
Gr´fica. Livros T´cnicos e Cient´
a e ıficos Editora Ltda.
[Plastock and Kalley, 1999] Plastock, R. and Kalley, G. (1999). Computa¸˜o Gr´fica. Mc Graw Hill.
ca a
[Schr¨eder, 1998] Schr¨eder, W. (1998). The Visualization Toolkit.
o o
[Schr¨eder et al., 1996] Schr¨eder, W. J., Martin, K., and Lorensen, W. (1996). The Visualization Toolkit
o o
- An Object-Oriented Approach to 3D Graphics. Prentice-Hall.
113](https://image.slidesharecdn.com/apostiladecomputaogrfica2006-130109073843-phpapp02/85/Apostila-de-computacao-grafica-2006-114-320.jpg)


Este documento apresenta os conceitos fundamentais da computação gráfica, incluindo sistemas gráficos, hardware gráfico, sistemas de coordenadas, dispositivos de visualização e entrada, algoritmos para desenho de primitivas gráficas e preenchimento de polígonos, e transformações 2D e 3D.