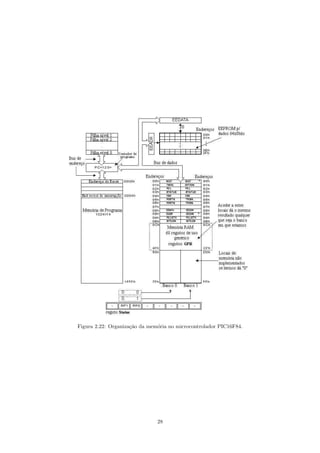
O documento fornece uma introdução aos microcontroladores da família PIC, descrevendo suas principais características e componentes. Ele se concentra no microcontrolador PIC16F84, explicando detalhadamente seus registros, memória, portas I/O, temporizador e operação de interrupção.




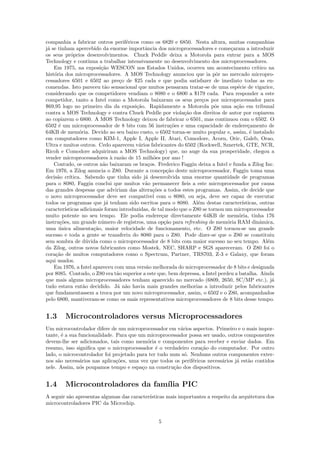












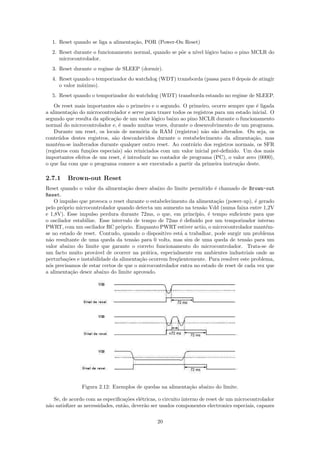














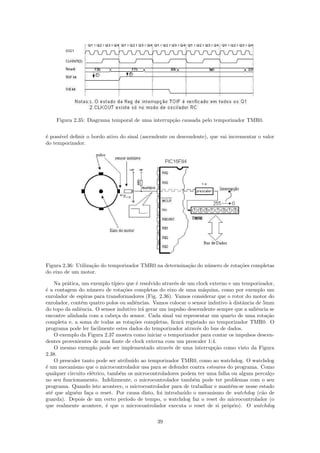





![Nestes casos, a execu¸˜o requer dois ciclos de instru¸˜o e o segundo ciclo ´ executado como sendo
ca ca e
um NOP (Nenhuma Opera¸˜o). Quatro oscila¸˜es de clock perfazem um ciclo de instru¸˜o. Se
ca co ca
estivermos a usar um oscilador com 4MHz de freq¨ˆncia, o tempo normal de execu¸˜o de uma
ue ca
instru¸ao ser´ de 1ms e, no caso de uma ramifica¸˜o condicional de 2ms.
c˜ a ca
3.7 Conjunto de instru¸oes
c˜
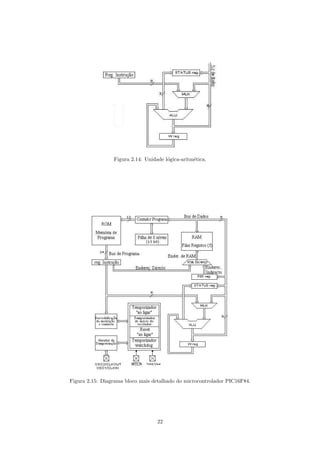
Significado de alguns s´
ımbolos:
f qualquer local de mem´ria num microcontrolador
o
W registro de trabalho
b posi¸˜o de bit no registro f
ca
d registro de destino
label grupo de oito caracteres que marca o in´ de uma parte do programa (r´tulo)
ıcio o
TOS topo da pilha
[ ] opcional
<> grupo de bits num registro
Figura 3.2: Mnemˆnicos Assembly.
o
Resumo das notas da Figura 3.2:
1. Se a porta de entrada/sa´ for o operando origem, ´ lido o estado dos pinos do microcon-
ıda e
trolador.
46](https://image.slidesharecdn.com/microcontroladorespic-100917210301-phpapp01/85/Microcontroladores-pic-46-320.jpg)

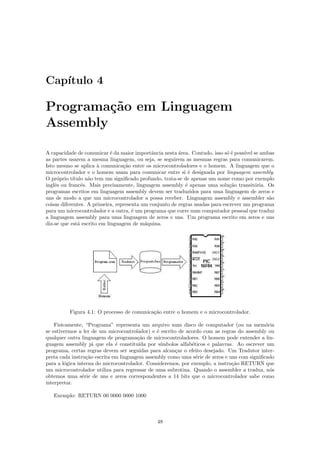



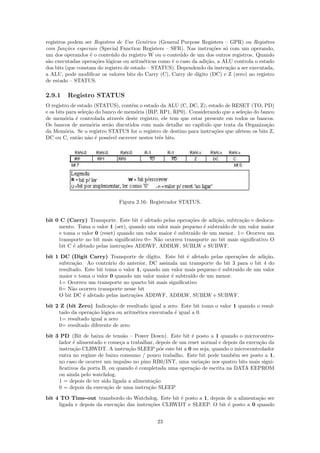
![o microcontrolador possa permanecer sem que ocorram erros. Trata-se de um loop infinito que
´ executado continuamente, enquanto a alimenta¸˜o n˜o for desligada. Finalmente, ´ necess´rio
e ca a e a
colocar a palavra end no fim de cada programa, de modo a informar o tradutor de assembly de
que o programa n˜o cont´m mais instru¸˜es.
a e co
4.2 Macros
As macros s˜o elementos muito uteis em linguagem assembly. Uma macro pode ser descrita em
a ´
poucas palavras como um grupo de instru¸˜es definido pelo utilizador que ´ acrescentado ao pro-
co e
´
grama pelo assembler, sempre que a macro for invocada. E poss´ ıvel escrever um programa sem
usar macros. Mas, se as utilizarmos, o programa torna-se muito mais leg´ ıvel, especialmente se
estiverem v´rios programadores a trabalhar no mesmo programa. As macros tˆm afinidades com
a e
as fun¸˜es nas linguagens de alto n´
co ıvel.
Como as escrever:
<r´tulo> macro
o
[<argumento1>,<argumento2>,.....,<argumentoN>]
.........
.........
endm
Pelo modo como s˜o escritas, vemos que as macros podem aceitar argumentos, o que tamb´m
a e
´ muito util em programa¸˜o. Quando o argumento ´ invocado no interior de uma macro, ele vai
e ´ ca e
ser substitu´ pelo valor argumentoN.
ıdo
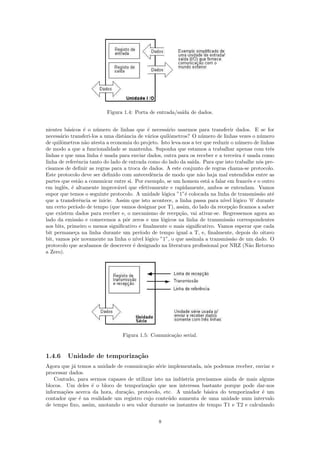
Figura 4.7: Exemplo de uma macro.
O exemplo da Figura 4.7 mostra uma macro cujo prop´sito ´ enviar para o porto B, o argumento
o e
ARG1, definido quando a macro foi invocada. Para a utilizarmos num programa, basta escrever
uma unica linha: ON PORTB 0xFF e, assim, colocamos o valor 0xFF no porto B. Para utilizar uma
´
macro no programa, ´ necess´rio incluir o arquivo macro no programa principal, por interm´dio
e a e
da instru¸˜o include nome da macro.inc. O conte´do da macro ´ automaticamente copiado para
ca u e
o local em que esta macro est´ escrita. Isto pode ver-se melhor no arquivo lst visto atr´s, onde a
a a
macro ´ copiada por baixo da linha include bank.inc.
e
52](https://image.slidesharecdn.com/microcontroladorespic-100917210301-phpapp01/85/Microcontroladores-pic-52-320.jpg)
![Referˆncias Bibliogr´ficas
e a
[1] Matic, N. The PIC Microcontroller, Microe, USA, 2002.
[2] Zanco, W. S. Microcontroladores PIC 16F628A/648A. Uma abordagem pr´tica e objetiva. Ed.
a
´
Erica. 2005.
[3] Zanco, W. S. Microcontroladores PIC. T´cnicas de software e hardware para projetos de cir-
e
´
cuitos eletrˆnicos. Com base no PIC 16F877A. Ed. Erica. 2006.
o
´
[4] Souza, D. J. Desbravando o PIC - Ampliado e Atualizado para PIC 16F628A. Ed. Erica, 2004.
´
[5] Souza, D. J. e LAVINIA, N. C. Conectando o PIC: Recursos Avan¸ados. Ed. Erica. 2005.
c
[6] www.microchip.com. Acessado em 02/2008.
53](https://image.slidesharecdn.com/microcontroladorespic-100917210301-phpapp01/85/Microcontroladores-pic-53-320.jpg)

































































