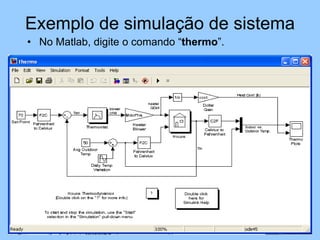
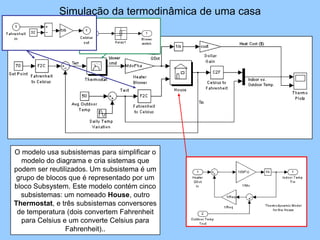
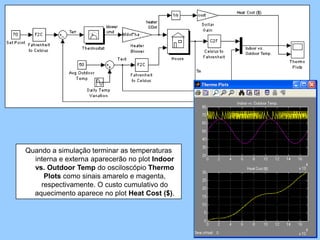
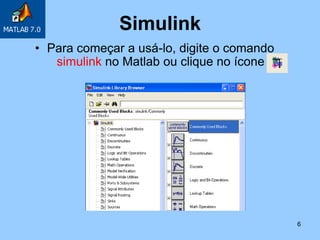
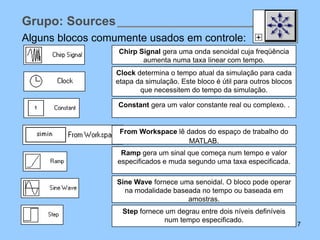
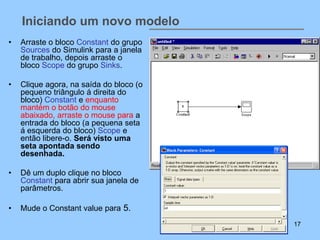
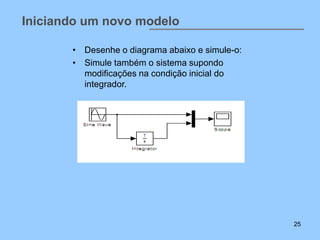
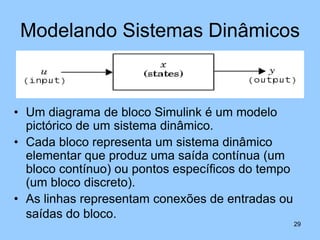
O documento discute o Simulink, um pacote de software para modelagem, simulação e análise de sistemas dinâmicos. Ele é mais poderoso do que o Matlab para analisar sistemas não-lineares e variantes no tempo. O documento fornece exemplos de como modelar e simular sistemas termodinâmicos de uma casa usando blocos como Constant, Scope e Subsystem.