O documento é um guia sobre a formação e funcionamento dos controladores lógicos programáveis (PLCs) S7-1200, incluindo a apresentação de hardware, configuração de software e programação. Detalha especificações técnicas, tipos de operações, blocos de programação e linguagens utilizadas, além de fornecer exercícios práticos. O conteúdo também abrange a funcionalidade de módulos de comunicação e expansão, bem como diferentes tipos de dados e instruções básicas e avançadas.






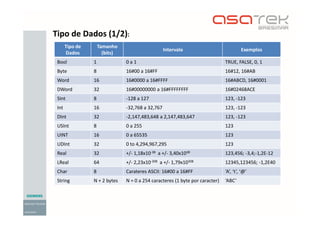
![Tipo de Dados
Tamanho
(bits)
Intervalo Exemplos
Time 32
T#-24d_20h_31m_23s_648ms to
T#24d_20h_31m_23s_647ms
T#12h_15m_30s_45ms
Date 16 D#1990-1-1 to D#2168-12-31
D#2009-12-31
DATE#2009-12-31
2009-12-31
Time_of_Day 32 TOD#0:0:0.0 to TOD#23:59:59.999
TOD#10:20:30.400
TIME_OF_DAY#10:20:30.400
23:10:1
DTL
(Date and Time
Long)
12 bytes
Min.: DTL#1970-01-01-00:00:00.0
Max.: DTL#2554-12-31-23:59:59.999
999 999
DTL#2008-12-16-
20:30:20.250
Arrays
ARRAY[1..20] of REAL
ARRAY[1..2, 3..4] of CHAR
Struct
PLC Data Types
Pointers
P#DB10.DBX20.0
P#M 20.0 BYTE 10
Tipo de Dados (1/2):](https://image.slidesharecdn.com/apresentao-jun18-v1-240708211317-1d4a03f7/85/Apresentacao-Jun18-V1-pdf_bresimar_training-15-320.jpg)