Baixado 23 vezes


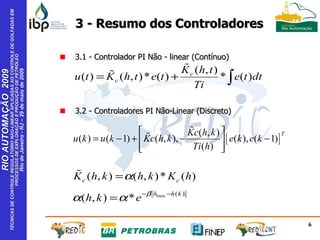
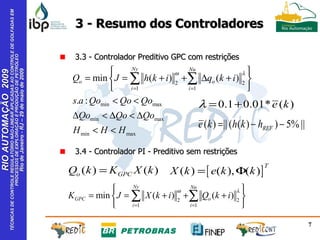


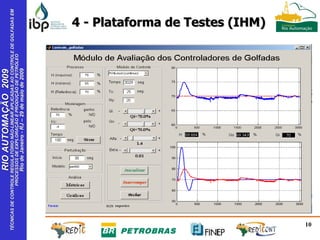
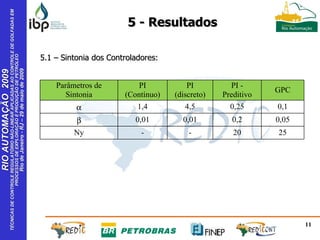


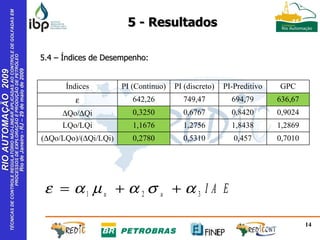

O documento apresenta técnicas de controle regulatório não-linear para gerenciar golfadas na vazão de saída em processos de petróleo. Modelos contínuos e discretos são utilizados, com resultados demonstrando que o controlador PI não-linear contínuo oferece melhor desempenho geral. Conclusões indicam a viabilidade de aplicação prática e desenvolvimento de supervisório para testes finais.





















