

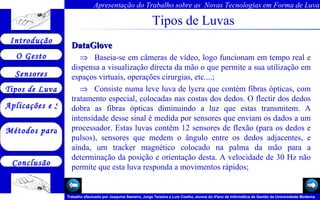
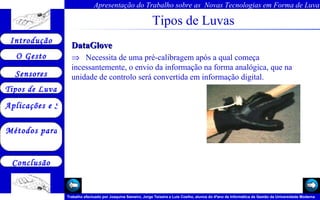
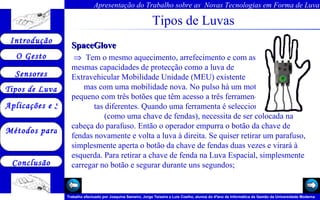
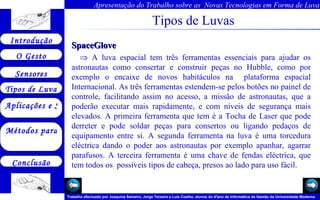

1) O documento discute interfaces homem-computador baseadas em gestos e luvas, e métodos para reconhecimento e análise de gestos. 2) Gestos podem ser estáticos ou dinâmicos, e reconhecimento de gestos envolve propriedades de imagem, marcadores, modelos 3D e sensores em luvas. 3) Sensores permitem que robôs interajam com o ambiente, incluindo sensores de força, distância e localização.

























