Professor
Nuno Lopes
Nuno Lopes
CursoProfissional de Técnico/a de Mecatrónica
11ºG
Disciplina – Tecnologia de Mecatrónica
UFCD 6059- Autómatos Programáveis
2.
2
Controlo de ProcessosIndustriais
Existem duas formas básicas de
realizar o CONTROLO DE
CONTROLO DE
PROCESSOS INDUSTRIAIS
PROCESSOS INDUSTRIAIS
Finalidade
Finalidade:
substituição do
operador humano por
um operador artificial.
Controlo em
malha aberta
Controlo em
malha fechada
3.
3
Controlo de ProcessosIndustriais
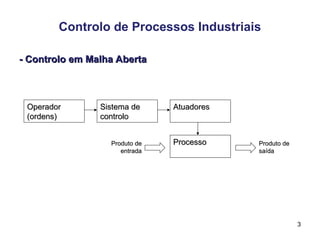
- Controlo em Malha Aberta
- Controlo em Malha Aberta
Operador
Operador
(ordens)
(ordens)
Sistema de
Sistema de
controlo
controlo
Atuadores
Atuadores
Processo
Processo
Produto de
Produto de
entrada
entrada
Produto de
Produto de
saída
saída
4.
4
Controlo de ProcessosIndustriais
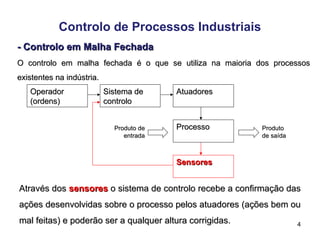
- Controlo em Malha Fechada
- Controlo em Malha Fechada
Através dos
Através dos sensores
sensores o sistema de controlo recebe a confirmação das
o sistema de controlo recebe a confirmação das
ações desenvolvidas sobre o processo pelos atuadores (ações bem ou
ações desenvolvidas sobre o processo pelos atuadores (ações bem ou
mal feitas) e poderão ser a qualquer altura corrigidas.
mal feitas) e poderão ser a qualquer altura corrigidas.
Operador
Operador
(ordens)
(ordens)
Sistema de
Sistema de
controlo
controlo
Atuadores
Atuadores
Processo
Processo
Produto de
Produto de
entrada
entrada
Produto
Produto
de saída
de saída
Sensores
Sensores
O controlo em malha fechada é o que se utiliza na maioria dos processos
O controlo em malha fechada é o que se utiliza na maioria dos processos
existentes na indústria.
existentes na indústria.
5.
5
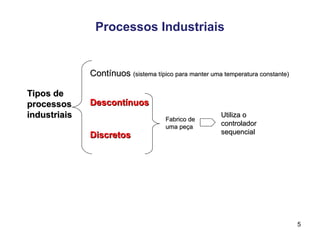
Processos Industriais
Tipos de
Tiposde
processos
processos
industriais
industriais
Contínuos
Contínuos (sistema típico para manter uma temperatura constante)
(sistema típico para manter uma temperatura constante)
Descontínuos
Descontínuos
Discretos
Discretos
Fabrico de
Fabrico de
uma peça
uma peça
Utiliza o
Utiliza o
controlador
controlador
sequencial
sequencial
6.
6
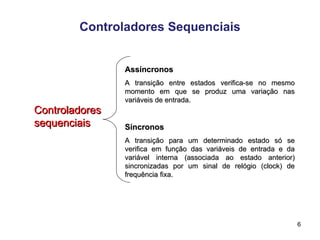
Controladores Sequenciais
Controladores
Controladores
sequenciais
sequenciais
Assíncronos
Assíncronos
A transiçãoentre estados verifica-se no mesmo
A transição entre estados verifica-se no mesmo
momento em que se produz uma variação nas
momento em que se produz uma variação nas
variáveis de entrada.
variáveis de entrada.
Síncronos
Síncronos
A transição para um determinado estado só se
A transição para um determinado estado só se
verifica em função das variáveis de entrada e da
verifica em função das variáveis de entrada e da
variável interna (associada ao estado anterior)
variável interna (associada ao estado anterior)
sincronizadas por um sinal de relógio (clock) de
sincronizadas por um sinal de relógio (clock) de
frequência fixa.
frequência fixa.
7.
7
Autómato Programável (PLC)
Autómatoprogramável ou controlador lógico programável
Autómato programável ou controlador lógico programável
(PLC) é todo o equipamento eletrónico capaz de controlar
(PLC) é todo o equipamento eletrónico capaz de controlar
em tempo real processos sequenciais em meios
em tempo real processos sequenciais em meios
industriais.
industriais.
8.
8
Vantagens e Desvantagensdos PLC
Vantagens na utilização do PLC:
Vantagens na utilização do PLC:
Reduzidas dimensões;
Reduzidas dimensões;
Grande fiabilidade;
Grande fiabilidade;
Facilidade de montagem;
Facilidade de montagem;
Possibilidade de se introduzirem modificações sem se mudar a
Possibilidade de se introduzirem modificações sem se mudar a
cablagem.
cablagem.
Desvantagens do PLC:
Desvantagens do PLC:
O seu custo inicial;
O seu custo inicial;
Necessidade de um técnico programador.
Necessidade de um técnico programador.
9.
9
Estrutura externa dosPLC
Estrutura
Estrutura
externa do PLC
externa do PLC
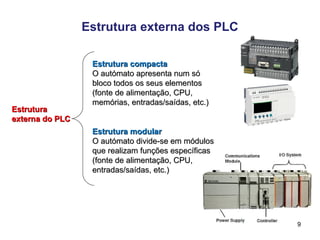
Estrutura compacta
Estrutura compacta
O autómato apresenta num só
O autómato apresenta num só
bloco todos os seus elementos
bloco todos os seus elementos
(fonte de alimentação, CPU,
(fonte de alimentação, CPU,
memórias, entradas/saídas, etc.)
memórias, entradas/saídas, etc.)
Estrutura modular
Estrutura modular
O autómato divide-se em módulos
O autómato divide-se em módulos
que realizam funções específicas
que realizam funções específicas
(fonte de alimentação, CPU,
(fonte de alimentação, CPU,
entradas/saídas, etc.)
entradas/saídas, etc.)
10.
10
Estrutura de umautómato programável
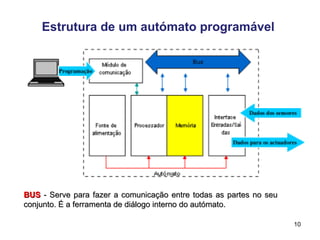
BUS
BUS - Serve para fazer a comunicação entre todas as partes no seu
- Serve para fazer a comunicação entre todas as partes no seu
conjunto. É a ferramenta de diálogo interno do autómato.
conjunto. É a ferramenta de diálogo interno do autómato.
11.
11
Estrutura de umautómato programável
A unidade central ou processador
A unidade central ou processador
Também chamado de processador constitui o cérebro do autómato.
Também chamado de processador constitui o cérebro do autómato.
O Processador:
O Processador:
•
• Lê os valores dos sensores.
Lê os valores dos sensores.
•
• Executa o programa com os dados contidos na memória.
Executa o programa com os dados contidos na memória.
•
• Escreve as saídas ligadas aos acionadores
Escreve as saídas ligadas aos acionadores.
.
12.
12
Estrutura de umautómato programável
A memória
A memória
•A memória do autómato contém o programa a executar mas
A memória do autómato contém o programa a executar mas
também os dados utilizados por esse programa
também os dados utilizados por esse programa (valores de
(valores de
temporizadores, monoestáveis, contadores...).
temporizadores, monoestáveis, contadores...).
•É o local onde são armazenadas todas as informações contidas
É o local onde são armazenadas todas as informações contidas
no autómato.
no autómato.
•Sem memória, um autómato não pode funcionar
Sem memória, um autómato não pode funcionar.
.
13.
13
Estrutura de umautómato programável
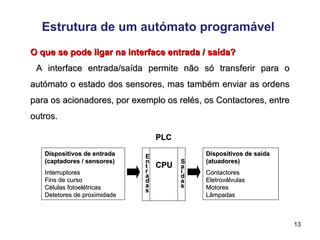
O que se pode ligar na interface entrada / saída?
O que se pode ligar na interface entrada / saída?
A interface entrada/saída permite não só transferir para o
A interface entrada/saída permite não só transferir para o
autómato o estado dos sensores, mas também enviar as ordens
autómato o estado dos sensores, mas também enviar as ordens
para os acionadores, por exemplo os relés, os Contactores, entre
para os acionadores, por exemplo os relés, os Contactores, entre
outros.
outros.
E
E
n
n
t
t
r
r
a
a
d
d
a
a
s
s
S
S
a
a
í
í
d
d
a
a
s
s
CPU
CPU
PLC
PLC
Dispositivos de saída
Dispositivos de saída
(atuadores)
(atuadores)
Contactores
Contactores
Eletroválvulas
Eletroválvulas
Motores
Motores
Lâmpadas
Lâmpadas
Dispositivos de entrada
Dispositivos de entrada
(captadores / sensores)
(captadores / sensores)
Interruptores
Interruptores
Fins de curso
Fins de curso
Células fotoelétricas
Células fotoelétricas
Detetores de proximidade
Detetores de proximidade
14.
14
Estrutura de umautómato programável
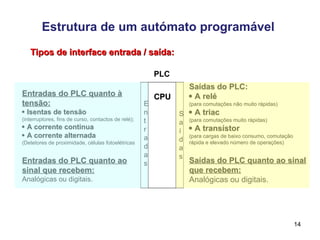
Tipos de interface entrada / saída:
Tipos de interface entrada / saída:
E
n
t
r
a
d
a
s
S
a
í
d
a
s
CPU
CPU
PLC
Entradas do PLC quanto à
Entradas do PLC quanto à
tensão:
tensão:
Isentas de tensão
Isentas de tensão
(interruptores, fins de curso, contactos de relé);
A corrente continua
A corrente continua
A corrente alternada
A corrente alternada
(Detetores de proximidade, células fotoelétricas
Entradas do PLC quanto ao
Entradas do PLC quanto ao
sinal que recebem:
sinal que recebem:
Analógicas ou digitais.
Saídas do PLC:
Saídas do PLC:
A relé
A relé
(para comutações não muito rápidas)
(para comutações não muito rápidas)
A triac
A triac
(para comutações muito rápidas)
(para comutações muito rápidas)
A transístor
A transístor
(para cargas de baixo consumo, comutação
(para cargas de baixo consumo, comutação
rápida e elevado número de operações)
rápida e elevado número de operações)
Saídas do PLC quanto ao sinal
Saídas do PLC quanto ao sinal
que recebem:
que recebem:
Analógicas ou digitais.
15.
15
Estrutura de umautómato programável
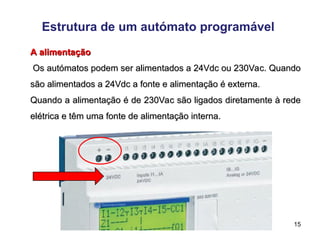
A alimentação
A alimentação
Os autómatos podem ser alimentados a 24Vdc ou 230Vac. Quando
Os autómatos podem ser alimentados a 24Vdc ou 230Vac. Quando
são alimentados a 24Vdc a fonte e alimentação é externa.
são alimentados a 24Vdc a fonte e alimentação é externa.
Quando a alimentação é de 230Vac são ligados diretamente à rede
Quando a alimentação é de 230Vac são ligados diretamente à rede
elétrica e têm uma fonte de alimentação interna.
elétrica e têm uma fonte de alimentação interna.
16.
16
Estrutura de umautómato programável
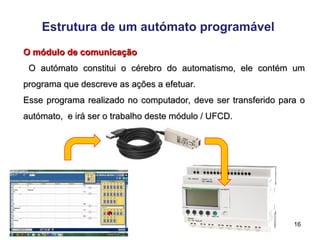
O módulo de comunicação
O módulo de comunicação
O autómato constitui o cérebro do automatismo, ele contém um
O autómato constitui o cérebro do automatismo, ele contém um
programa que descreve as ações a efetuar.
programa que descreve as ações a efetuar.
Esse programa realizado no computador, deve ser transferido para o
Esse programa realizado no computador, deve ser transferido para o
autómato, e irá ser o trabalho deste módulo / UFCD.
autómato, e irá ser o trabalho deste módulo / UFCD.
18
Funcionamento do autómato
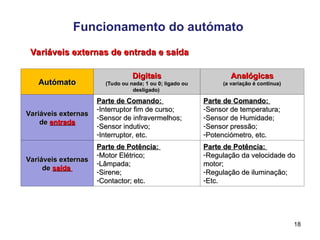
Variáveisexternas de entrada e saída
Variáveis externas de entrada e saída
Autómato
Autómato
Digitais
Digitais
(Tudo ou nada; 1 ou 0; ligado ou
(Tudo ou nada; 1 ou 0; ligado ou
desligado)
desligado)
Analógicas
Analógicas
(a variação é contínua)
(a variação é contínua)
Variáveis externas
Variáveis externas
de
de entrada
entrada
Parte de Comando:
Parte de Comando:
-Interruptor fim de curso;
Interruptor fim de curso;
-Sensor de infravermelhos;
Sensor de infravermelhos;
-Sensor indutivo;
Sensor indutivo;
-Interruptor, etc.
Interruptor, etc.
Parte de Comando:
Parte de Comando:
-Sensor de temperatura;
Sensor de temperatura;
-Sensor de Humidade;
Sensor de Humidade;
-Sensor pressão;
Sensor pressão;
-Potenciómetro, etc.
Potenciómetro, etc.
Variáveis externas
Variáveis externas
de
de saída
saída
Parte de Potência:
Parte de Potência:
-Motor Elétrico;
Motor Elétrico;
-Lâmpada;
Lâmpada;
-Sirene;
Sirene;
-Contactor; etc.
Contactor; etc.
Parte de Potência:
Parte de Potência:
-Regulação da velocidade do
Regulação da velocidade do
motor;
motor;
-Regulação de iluminação;
Regulação de iluminação;
-Etc.
Etc.
19.
19
Ciclo do Programa
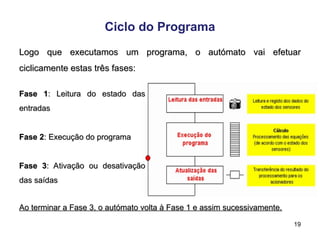
Logoque executamos um programa, o autómato vai efetuar
Logo que executamos um programa, o autómato vai efetuar
ciclicamente estas três fases:
ciclicamente estas três fases:
Fase 1
Fase 1: Leitura do estado das
: Leitura do estado das
entradas
entradas
Fase 2
Fase 2: Execução do programa
: Execução do programa
Fase 3
Fase 3: Ativação ou desativação
: Ativação ou desativação
das saídas
das saídas
Ao terminar a Fase 3, o autómato volta à Fase 1 e assim sucessivamente.
Ao terminar a Fase 3, o autómato volta à Fase 1 e assim sucessivamente.
20.
20
O que éum Programa?
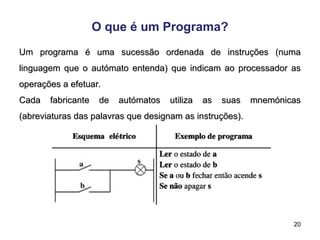
Um programa é uma sucessão ordenada de instruções (numa
Um programa é uma sucessão ordenada de instruções (numa
linguagem que o autómato entenda) que indicam ao processador as
linguagem que o autómato entenda) que indicam ao processador as
operações a efetuar.
operações a efetuar.
Cada fabricante de autómatos utiliza as suas mnemónicas
Cada fabricante de autómatos utiliza as suas mnemónicas
(abreviaturas das palavras que designam as instruções).
(abreviaturas das palavras que designam as instruções).
21.
21
O que éa Linguagem de Programação?
A linguagem de programação é uma linguagem reconhecida pelo
A linguagem de programação é uma linguagem reconhecida pelo
processador do autómato graças à qual são descritas as instruções a
processador do autómato graças à qual são descritas as instruções a
efetuar.
efetuar.
Linguagens de programação mais utilizadas:
Linguagens de programação mais utilizadas:
•
• Linguagem em lista de instruções (Instruction List – IL).
Linguagem em lista de instruções (Instruction List – IL).
•
• Linguagem em diagrama de contactos (
Linguagem em diagrama de contactos (Ladder Diagram
Ladder Diagram – LD)
– LD)
22.
22
Operadores lógicos elementares
CircuitoSérie (Operador E (AND))
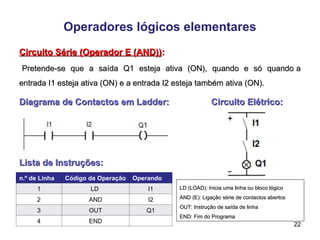
Circuito Série (Operador E (AND)):
:
Pretende-se que a saída Q1 esteja ativa (ON), quando e só quando a
Pretende-se que a saída Q1 esteja ativa (ON), quando e só quando a
entrada I1 esteja ativa (ON) e a entrada I2 esteja também ativa (ON).
entrada I1 esteja ativa (ON) e a entrada I2 esteja também ativa (ON).
Diagrama de Contactos em Ladder:
Diagrama de Contactos em Ladder: Circuito Elétrico:
Circuito Elétrico:
Lista de Instruções:
Lista de Instruções:
n.º de Linha Código da Operação Operando
1 LD I1
2 AND I2
3 OUT Q1
4 END
LD (LOAD): Inicia uma linha ou bloco lógico
LD (LOAD): Inicia uma linha ou bloco lógico
AND (E): Ligação série de contactos abertos
AND (E): Ligação série de contactos abertos
OUT: Instrução de saída de linha
OUT: Instrução de saída de linha
END: Fim do Programa
END: Fim do Programa
23.
23
Operadores lógicos elementares
CircuitoSérie (Operador Não E (AND NOT))
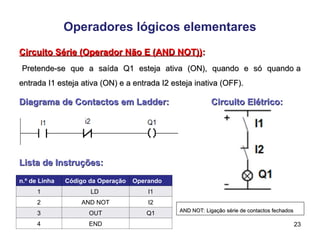
Circuito Série (Operador Não E (AND NOT)):
:
Pretende-se que a saída Q1 esteja ativa (ON), quando e só quando a
Pretende-se que a saída Q1 esteja ativa (ON), quando e só quando a
entrada I1 esteja ativa (ON) e a entrada I2 esteja inativa (OFF).
entrada I1 esteja ativa (ON) e a entrada I2 esteja inativa (OFF).
Diagrama de Contactos em Ladder:
Diagrama de Contactos em Ladder: Circuito Elétrico:
Circuito Elétrico:
Lista de Instruções:
Lista de Instruções:
n.º de Linha Código da Operação Operando
1 LD I1
2 AND NOT I2
3 OUT Q1
4 END
AND NOT: Ligação série de contactos fechados
AND NOT: Ligação série de contactos fechados
24.
24
Operadores lógicos elementares
CircuitoParalelo (Operador OU (OR))
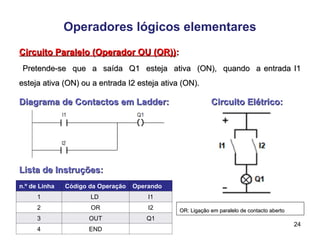
Circuito Paralelo (Operador OU (OR)):
:
Pretende-se que a saída Q1 esteja ativa (ON), quando a entrada I1
Pretende-se que a saída Q1 esteja ativa (ON), quando a entrada I1
esteja ativa (ON) ou a entrada I2 esteja ativa (ON).
esteja ativa (ON) ou a entrada I2 esteja ativa (ON).
Diagrama de Contactos em Ladder:
Diagrama de Contactos em Ladder: Circuito Elétrico:
Circuito Elétrico:
Lista de Instruções:
Lista de Instruções:
n.º de Linha Código da Operação Operando
1 LD I1
2 OR I2
3 OUT Q1
4 END
OR: Ligação em paralelo de contacto aberto
OR: Ligação em paralelo de contacto aberto
25.
25
Operadores lógicos elementares
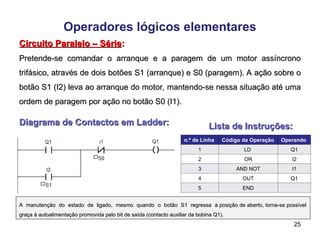
Diagramade Contactos em Ladder:
Diagrama de Contactos em Ladder: Lista de Instruções:
Lista de Instruções:
n.º de Linha Código da Operação Operando
1 LD Q1
2 OR I2
3 AND NOT I1
4 OUT Q1
5 END
A manutenção do estado de ligado, mesmo quando o botão S1 regressa à posição de aberto, torna-se possível
A manutenção do estado de ligado, mesmo quando o botão S1 regressa à posição de aberto, torna-se possível
graça à autoalimentação promovida pelo bit de saída (contacto auxiliar da bobina Q1).
graça à autoalimentação promovida pelo bit de saída (contacto auxiliar da bobina Q1).
Circuito Paralelo – Série
Circuito Paralelo – Série:
:
Pretende-se comandar o arranque e a paragem de um motor assíncrono
Pretende-se comandar o arranque e a paragem de um motor assíncrono
trifásico, através de dois botões S1 (arranque) e S0 (paragem). A ação sobre o
trifásico, através de dois botões S1 (arranque) e S0 (paragem). A ação sobre o
botão S1 (I2) leva ao arranque do motor, mantendo-se nessa situação até uma
botão S1 (I2) leva ao arranque do motor, mantendo-se nessa situação até uma
ordem de paragem por ação no botão S0 (I1).
ordem de paragem por ação no botão S0 (I1).