Baixado 96 vezes
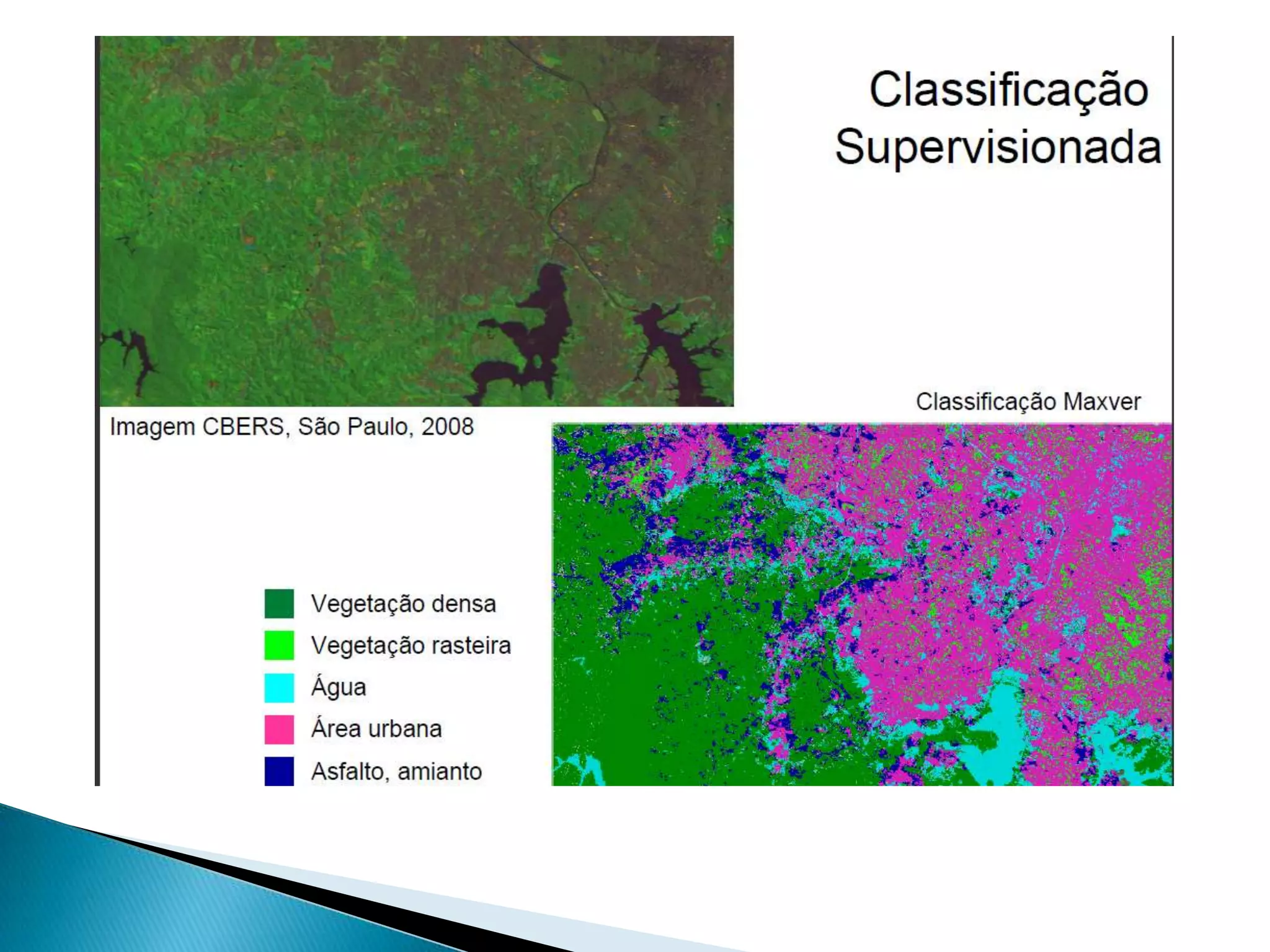
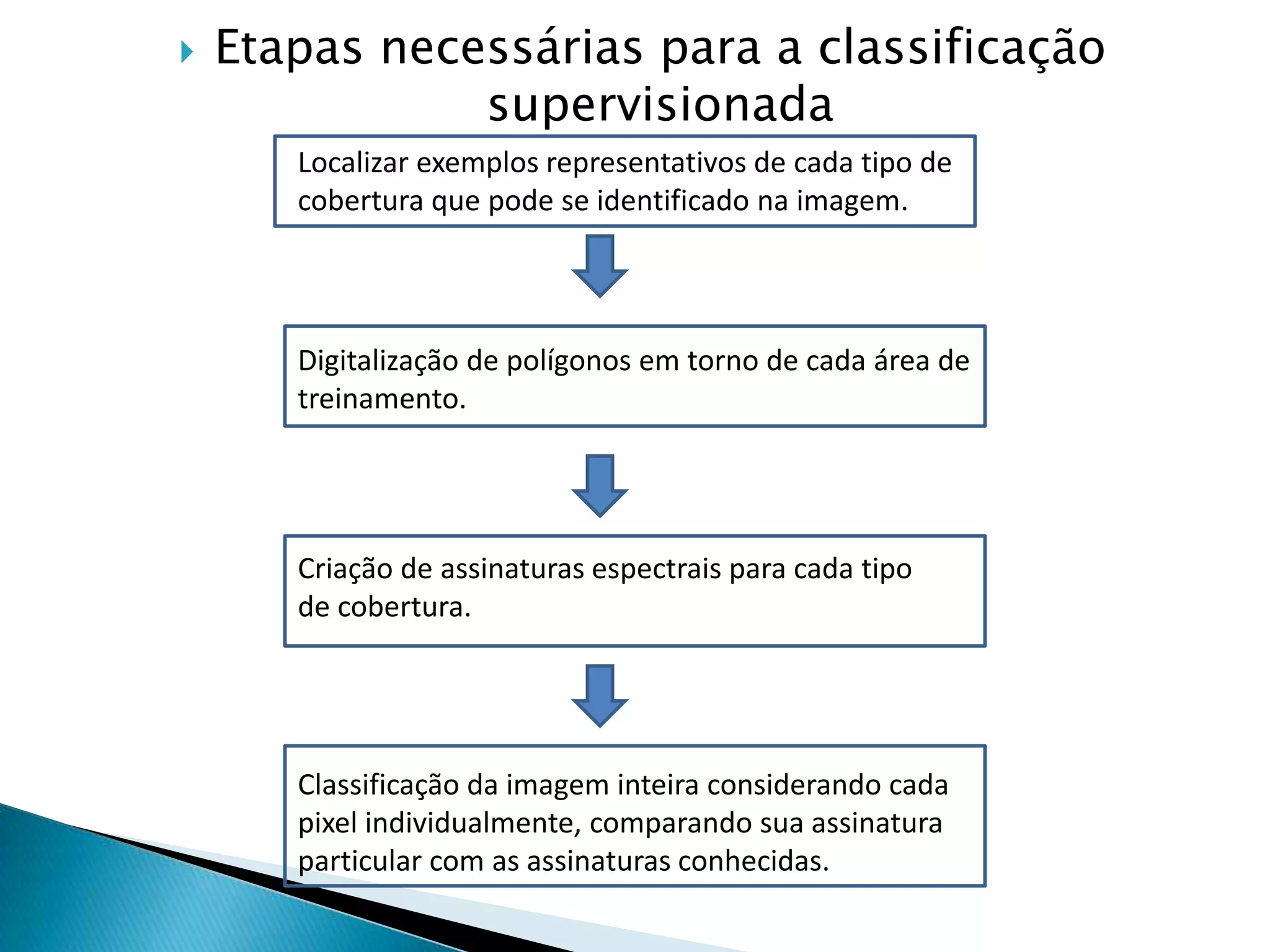

O documento discute classificação supervisionada de sensoriamento remoto, que envolve usar algoritmos para determinar pixels que representam valores de reflexão característicos de cada classe. Isso é feito coletando amostras de treinamento de cada classe e comparando pixels desconhecidos às amostras usando algoritmos como máxima verossimilhança, distância euclidiana e paralelepípedo.






















































