Aplicações de LIDAR
•Transferir como PPTX, PDF•
0 gostou•730 visualizações

O documento descreve o funcionamento do LIDAR (Light Detection and Ranging), um sistema que usa pulsos laser para medir distâncias entre uma plataforma e alvos, permitindo estimar suas posições. Explica como os dados coletados pelo LIDAR podem ser usados para gerar Modelos Digitais do Terreno e da Superfície, distinguindo apenas o terreno ou incluindo outros objetos. Finalmente, cita um exemplo de software usado para sistemas LIDAR.

Recomendados
Recomendados
Mais conteúdo relacionado
Semelhante a Aplicações de LIDAR
Semelhante a Aplicações de LIDAR (16)
Mais de André Andrade
Mais de André Andrade (20)
Aplicações de LIDAR
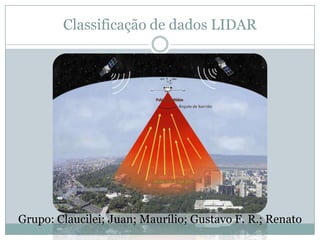
- 1. Classificação de dados LIDAR Grupo: Claucilei; Juan; Maurílio; Gustavo F. R.; Renato
- 2. O que é LIDAR? LIDAR (Light Detection and Raging). O princípio de posicionamento de varredura laser consiste na emissão de um pulso laser de uma plataforma (aérea, terrestre ou orbital) com uma elevada frequência de repetição. O tempo de retorno dos pulsos laser entre a plataforma e os alvos é medido pelo sensor, permitindo a estimativa destas distâncias (Baltsavias, 1999; Wagner et al., 2004). Sistema ALS (Airborne Laser Scanner) Fonte: searchmesh.net
- 3. Funcionamento O sistema receptor recebe um sinal analógico de retorno e, por meio de um conversor, transforma o sinal em digital, sendo que o sinal digital da radiação refletida passa por um filtro de suavização que verifica se o sinal recebido possui a mesma intensidade do sinal emitido. Outro parâmetro é o conjunto ótico do sistema. Após o pulso ser gerado, ele é dirigido para o espelho de varredura. Um conjunto ótico de lentes e espelhos orienta os pulsos laser, emitindo-os para os objetos no terreno e sequencialmente recebendo os sinais de retorno direcionando-os para o receptor.
- 4. MDT e MDS Com o sistema LIDAR, junto com a cota do terreno, a cota de outros objetos acima dele, como edificações e a vegetação, é registrada, prejudicando a medição de pontos no terreno. Isso Modelo Digital do Terreno (3D) motivou a necessidade de se estabelecer a diferença conceitual entre um Modelo Digital do Terreno (armazena apenas as altitudes dos pontos na superfície do terreno) e um Modelo Digital de Superfície (é aquele que inclui outros objetos tais como árvores e edificações). Modelo Digital da Superfície (3D) Fonte: Scielo
- 5. Software Ex: ALS 300 Leosphere Fonte: Leosphere