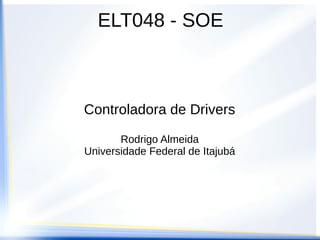
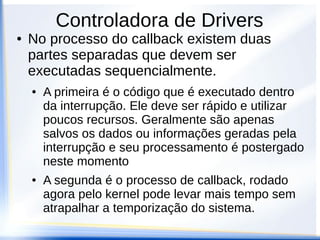
![static driver* driversLoaded[QNTD_DRV];
static char qntDrvLoaded;
char initDriver(char newDriver) {
char resp = FAIL;
if(dLoaded < QNTD_DRV) {
//obtem a estrutura do driver desejado
drivers[dLoaded] = drvInitVect[newDriver]();
//should test if driver was loaded correcly
resp = drivers[dLoaded]->drv_init(&newDriver);
dLoaded++;
}
return resp;
}
Controladora de Drivers](https://image.slidesharecdn.com/elt048-08-controladoradedrivers-130606071625-phpapp02/85/Projeto-de-uma-controladora-de-drivers-10-320.jpg)
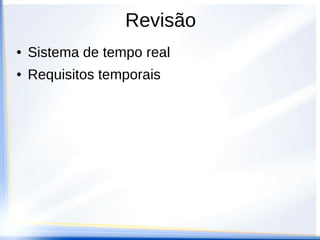
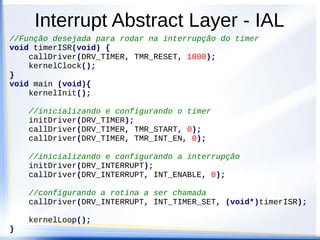
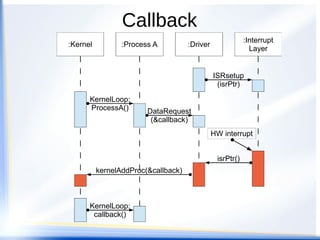
![#ifndef ctrdrv_h
#define ctrdrv_h
#define QNTD_DRV 20
char initCtrDrv(void);
char callDriver(char drv_id, char func_id, void
*parameters);
char initDriver(char newDriver);
// Drivers conhecidos estáticamente
enum {
DRV_END /*DRV_END must always be the last*/
};
static ptrGetDrv drvGetFunc[DRV_END] = {
};
#endif // ctrdrv_h
Controladora de Drivers](https://image.slidesharecdn.com/elt048-08-controladoradedrivers-130606071625-phpapp02/85/Projeto-de-uma-controladora-de-drivers-12-320.jpg)
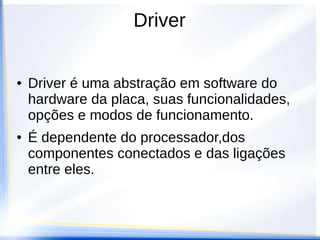
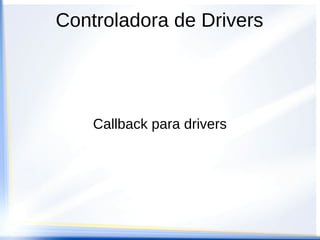
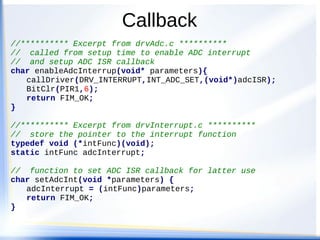
![//ddCtr.h
#include "drvGenerico.h"
#include "drvInterrupt.h"
#include "drvTimer.h"
enum {
DRV_GEN, /*1st driver*/
DRV_INTERRUPT, /*2nd driver*/
DRV_TIMER, /*3rd driver*/
DRV_END /*DRV_END must always be the last*/
};
//the functions to get the drivers should be put in
the same order as in the enum
static ptrGetDrv drvGetFunc[DRV_END] = {
getGenericoDriver, /*1st driver*/
getInterruptDriver, /*2nd driver*/
getTimerDriver /*3rd driver*/
};
Controladora de Drivers](https://image.slidesharecdn.com/elt048-08-controladoradedrivers-130606071625-phpapp02/85/Projeto-de-uma-controladora-de-drivers-13-320.jpg)
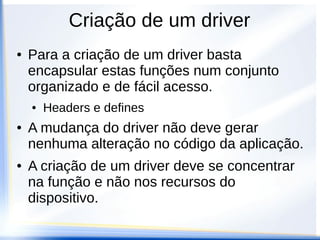
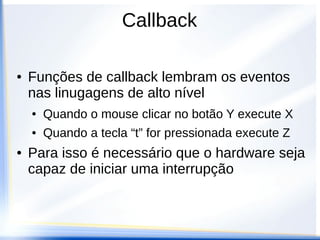
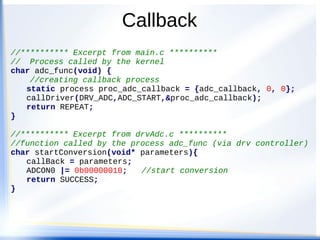
![char callDriver(char drv_id,
char func_id,
void *param) {
char i;
for (i = 0; i < dLoaded; i++) {
//find the right driver
if (drv_id == drivers[i]->drv_id) {
return
drivers[i]->func[func_id].func_ptr(param);
}
}
return DRV_FUNC_NOT_FOUND;
}
Controladora de Drivers](https://image.slidesharecdn.com/elt048-08-controladoradedrivers-130606071625-phpapp02/85/Projeto-de-uma-controladora-de-drivers-14-320.jpg)

![Interrupt Abstract Layer - IAL
//mc9s12 + Codewarrior
typedef void (*near tIsrFunc)(void);
static const tIsrFunc _InterruptVectorTable[] @0xFFF0={isrVrti};
void interrupt isrVrti (void){
thisInterrupt();
}
//pic18f4550 + SDCC
void isr(void) interrupt 1 {
thisInterrupt();
}
//pic18f4550 + C18
void isr (void){
thisInterrupt();
}
#pragma code highvector=0x08
void highvector(void){
_asm goto isr _endasm
}
#pragma code](https://image.slidesharecdn.com/elt048-08-controladoradedrivers-130606071625-phpapp02/85/Projeto-de-uma-controladora-de-drivers-22-320.jpg)
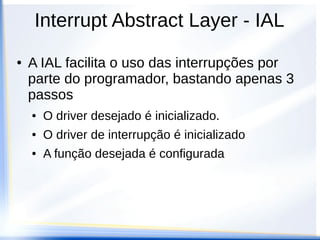
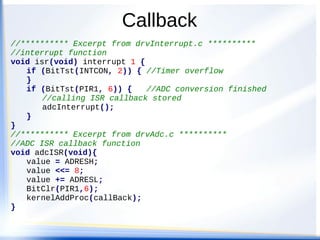
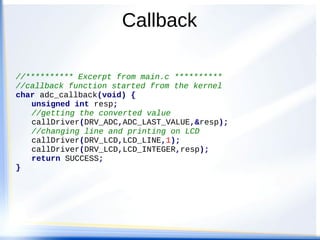

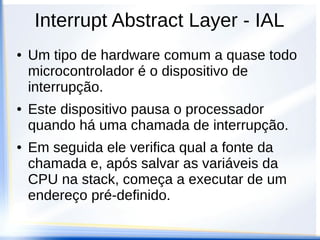
O documento descreve uma controladora de drivers para gerenciar drivers de dispositivos de forma padronizada. A controladora inicializa e mantém os drivers carregados, armazenando informações sobre eles. Ela funciona como uma camada de segurança entre o kernel e os drivers, evitando comandos incorretos. A controladora também suporta callbacks para que drivers possam registrar funções a serem chamadas assincronamente, como em interrupções.















































