Este artigo apresenta uma metodologia para coordenar os atuadores das pernas de robôs móveis usando aprendizado por reforço para maximizar a velocidade frontal do robô. A posição dos atuadores é descrita por funções periódicas que são determinadas iterativamente. Dois casos de estudo são simulados e implementados em robôs reais: um quadrúpede e um trípede.




![a
4. Wp (t): velocidade angular do atuador a da perna
p.
IW =
Utilizando as vari´veis medidas, as seguintes matrizes
a
amostradas s˜o definidas:
a
V (x, 1)
V = V (y, 1)
V (z, 1)
W (x, 1)
W = W (y, 1)
W (z, 1)
V (x, 2)
V (y, 2)
V (z, 2)
W (x, 2)
W (y, 2)
W (z, 2)
...
...
...
V (x, N )
V (y, N )
V (z, N )
... W (x, N )
... W (y, N )
... W (z, N )
3
i=1 (
(3)
N
• V (i, j) corresponde a velocidade linear do CM no
`
eixo x, y ou z (i = 1, 2 ou 3 respectivamente) no
instante de amostragem j (j = 1 a N );
O valor de Ec ´ dado pela Equa¸ao 6, onde ti e tf
e
c˜
s˜o os instantes de tempo inicial e final da realiza¸ao
a
c˜
de um passo.
• W (i, j) corresponde a velocidade angular do CM
`
em torno do eixo x, y ou z (i = 1, 2 ou 3 respectivamente) no instante de amostragem j (j = 1 a
N ).
Na
Para mensurar essas varia¸oes, s˜o definidas as tac˜
a
xas de varia¸oes das velocidades lineares (IV ) e das
c˜
velocidades angulares (IW ). A primeira ´ mensue
rada a partir das varia¸oes das velocidades lineares
c˜
observadas no CM, cujo valor ´ obtido atrav´s da
e
e
Equa¸ao (4).
c˜
IV =
3
i=1 (
N
j=1 (V
(i, j) − V (i))2 )
N
(4)
A taxa de varia¸ao das velocidades angulares (IW )
c˜
´ obtida de forma an´loga a IV . Para tal, utiliza-se
e
a
`
a Equa¸ao (5) (Golub e Hu, 2003).
c˜
82
tf
a
a
τp (t) Wp (t) dt
Ec =
a=1
2. Suavidade da locomo¸ao do robˆ: Deseja-se minic˜
o
mizar as varia¸oes das velocidades lineares e anguc˜
lares observadas no CM do robˆ para evitar que, ao
o
carregar uma carga, o seu conte´do seja danificado.
u
(5)
4. Consumo de energia: Visando maximizar o tempo
de opera¸ao do robˆ sem a necessidade de paradas
c˜
o
para a recarga das suas baterias, a minimiza¸ao do
c˜
consumo de energia ´ considerada. Para tal, buscae
se minimizar a soma da energia cin´tica rotacional
e
verificada em todos os atuadores (Ec).
onde:
1. Velocidade: Visando viabilizar que o robˆ chegue
o
ao seu destino rapidamente, busca-se um comportamento que maximize a m´dia da velocidade linear
e
(V ) do CM do robˆ no sentido positivo do eixo x;
o
− W (i))2 )
3. M´ximo torque exigido: No intuito de evitar a saa
tura¸ao do atuador real e permitir que robˆs com
c˜
o
atuadores menos potentes possam viabilizar o desempenho desejado, busca-se minimizar o m´ximo
a
torque instantˆneo aplicado pelos atuadores consia
derando todas as pernas (τmax ). Dessa maneira,
implicitamente assume-se que todos os atuadores
s˜o iguais.
a
(2)
Com esses sinais obtidos, quatro ´
ındices s˜o utilizados
a
para avaliar a qualidade da resposta obtida:
N
j=1 (W (i, j)
(6)
ti
Dessa forma, essas grandezas escalares comp˜em o vetor
o
de desempenho J = [Vx IV IW τmax Ec] que quantifica
o resultado obtido com a utiliza¸ao de um determinado
c˜
a
conjunto de fun¸oes fp (t).
c˜
4
PROPOSTA DE SOLUCAO
¸˜
Para ajustar as vari´veis que definem as fun¸oes de refea
c˜
rˆncia de cada atuador, este artigo utiliza uma t´cnica de
e
e
aprendizado por refor¸o conhecida como Learning Auc
tomata (Narendra e Thathachar, 1974).
O Aprendizado por Refor¸o (AR) corresponde a um
c
meio de mapear situa¸oes em a¸oes visando maximic˜
c˜
zar um sinal de refor¸o num´rico. Para tal, avalia-se
c
e
o conhecimento acumulado pela aplica¸ao de propostas
c˜
de solu¸oes para direcionar a busca por melhores soluc˜
coes (Sutton e Barto, 1998; Thathachar e Sastry, 2002).
¸˜
Dessa forma, o AR caracteriza-se como um m´todo de
e
aprendizado com supervis˜o fraca, cujo supervisor apea
nas fornece informa¸oes de sucesso ou fracasso durante a
c˜
fase de treinamento (Nascimento Jr. e Yoneyama, 2000).
As t´cnicas existentes em AR s˜o compostas por quatro
e
a
elementos:
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-5-320.jpg)
![k
e N E − 1. Portanto, como f1 (t) denota a fun¸ao peri´c˜
o
dica do k-´simo atuador da perna 1 (perna de referˆncia
e
e
do grupo), ent˜o a fun¸ao peri´dica do k-´simo atuador
a
c˜
o
e
da j-´sima perna ser´ dada por:
e
a
k
k
fj (t) = f1 t + φg (j)
g
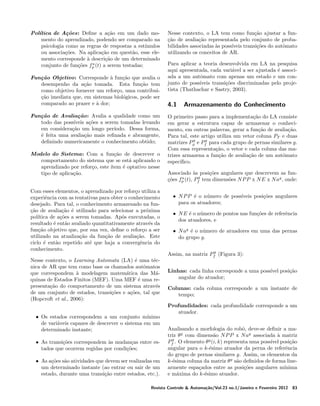
Figura 3: Organiza¸˜o da matriz Pf que armazena o conhecica
mento adquirido pelo aprendizado por refor¸o para as posi¸oes
c
c˜
angulares dos atuadores.
Com essa representa¸ao, o valor do elemento da mac˜
g
triz Pf (i, j, k) representa a estimativa de probabilidade
de sucesso quando o elemento θ g (i, k) define o j-´simo
e
ponto da fun¸ao de referˆncia do k-´simo atuador da
c˜
e
e
perna de referˆncia do grupo g. Assim, a soma dos valoe
g
res de uma mesma coluna da matriz Pf deve ser sempre
1.
Inicialmente, como ainda n˜o foi adquirido nenhum coa
nhecimento a respeito dos pontos que ir˜o compor cada
a
g
fun¸ao, todas as probabilidades Pf (i, j, k) assumem o
c˜
valor 1/N P P .
g
A matriz Pφ (Figura 4) armazena o conhecimento referente as defasagens das pernas do grupo g e tem di`
mens˜o N E x N pg onde N pg ´ o n´mero de pernas no
a
e
u
grupo g. Essa matriz ´ organizada da seguinte forma:
e
Linhas: cada linha corresponde a um poss´ valor de
ıvel
defasagem;
Colunas: cada coluna corresponde a uma perna do
grupo de pernas similares.
T
NE
(7)
g
Como a primeira coluna da matriz Pφ est´ associada a
a
`
perna de referˆncia (cuja defasagem por defini¸ao ´ 0),
e
c˜ e
g
ent˜o tal coluna ´ definida como Pφ (:, 1) = [1, 0, ..., 0]T
a
e
e n˜o ´ alterada pelo algoritmo de aprendizado. Os elea e
g
a
mentos das demais colunas da matriz Pφ s˜o definidos
inicialmente como 1/N E.
Por fim, o projetista deve ainda definir os vetores VT
e PT com o mesmo n´mero de elementos. O vetor VT
u
cont´m os poss´
e
ıveis valores para o parˆmetro T (per´
a
ıodo
das fun¸oes de referˆncia de todos os atuadores do robˆ).
c˜
e
o
O Apˆndice A deste artigo mostra como o projetista
e
pode definir os elementos do vetor VT .
O elemento PT (i) representa a estimativa da probabilidade de sucesso quando o valor VT (i) ´ usado como o
e
per´
ıodo das fun¸oes de referˆncia de todos os atuadores
c˜
e
do robˆ.
o
g
g
Como no caso das colunas das matrizes Pf e Pφ , inicialmente PT (i) = 1/N P T , onde N P T corresponde ao
tamanho do vetor VT .
4.2
Algoritmo de aprendizado
Para implementar o algoritmo de aprendizado proposto
(LA) segue-se os seguintes passos a cada itera¸ao:
c˜
1. Sele¸ao da solu¸ao a ser testada;
c˜
c˜
2. Quantifica¸ao da qualidade da resposta obtida utic˜
lizando da representa¸ao simulada do robˆ;
c˜
o
3. Ajuste das probabilidades de sucesso e verifica¸ao
c˜
da convergˆncia do conhecimento.
e
4.2.1
g
Figura 4: Organiza¸˜o da matriz Pφ que armazena o conheca
cimento adquirido pelo aprendizado por refor¸o para as defasac
gens entre as pernas de um mesmo grupo de pernas similares.
As defasagens das pernas de um mesmo grupo (elementos do vetor φg ) admitem valores inteiros entre 0
84
Sele¸˜o da Solu¸˜o a Ser Testada
ca
ca
O primeiro passo do algoritmo de aprendizado corresponde a sele¸ao da solu¸ao a ser testada, ou seja, a de`
c˜
c˜
fini¸ao da pol´
c˜
ıtica de a¸oes composta pelas fun¸oes de
c˜
c˜
a
referˆncias fp (t). Os parˆmetros que caracterizam as
e
a
referidas fun¸oes s˜o selecionados aleat´riamente consic˜
a
o
derando as probabilidades registradas no vetor PT e nas
g
g
matrizes Pf e Pφ .
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-7-320.jpg)

![1:
2:
3:
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
encontre i∗ = {i que maximiza PT (i)}
T = VT (i∗ )
for g = 1 → N g do
for k = 1 → N ag do
for j = 1 → N E do
g
encontre i∗ = {i que maximiza Pf (i, j, k)}
T
k
f1 (j − 1) N E = θg (i∗ , k)
end for
end for
if N p > 1 then
for p = 1 → N pg do
g
encontre i∗ = {i que maximiza Pφ (i, p)}
T
k
k
fp (t) = f1 t + (i∗ − 1) N E
end for
end if
end for
5.1
Robˆ M´vel Quadr´pede
o o
u
Com as caracter´
ısticas apresentadas na Tabela 1 e os
limites das posi¸oes angulares dos atuadores do robˆ
c˜
o
apresentadas na Tabela 2, todas as pernas do robˆ quao
dr´pede podem ser agrupadas em um unico grupo ao
u
´
verificar a similaridade do robˆ. Assim, o algoritmo de
o
aprendizado deve definir os valores para 16 vari´veis que
a
s˜o:
a
• o per´
ıodo de tempo T , usando os vetores VT e PT ,
• os 12 pontos que formam as fun¸oes de referˆncia
c˜
e
dos 3 atuadores da perna de referˆncia, com 4 pone
tos por fun¸ao (usando as matrizes θ e Pf ), e
c˜
• as 3 defasagens das outras 3 pernas (usando a matriz Pφ ).
Tabela 1: Caracter´
ısticas do robˆ quadr´pede.
o
u
Np
4
Na
3
Peso
(kg)
1, 54
Dimens˜es (cm)
o
X
Y
Z
30 19, 5
11
Figura 6: Robˆs utilizados nos testes.
o
postos de diversas formas viabilizando a montagem de
robˆs com pernas, garras e/ou rodas. Os referidos como
ponentes correspondem a:
1. Uma unidade de processamento microcontrolada
conhecida como CM-5 que age como o coordenador
central e ´ respons´vel por gerenciar os demais elee
a
mentos (atuadores e sensores) atrav´s de uma rede
e
de comunica¸ao serial cabeada tipo ”daisy-chain”
c˜
embarcada no robˆ;
o
2. Servomotores microcontrolados que s˜o usados
a
como atuadores em cada junta; o microcontrolador
de cada servomotor recebe a fun¸ao de referˆncia
c˜
e
da posi¸ao angular e gera os sinais de controle para
c˜
o servomotor;
3. Diversos tipos de arma¸oes para conectar os comc˜
ponentes, permitindo montar o robˆ almejado.
o
Em ambos os estudos de caso os processos de aprendizado utilizaram um N P P = 20, um N P T = 20 e um
N E = 4.
86
Tabela 2: Limites das posi¸oes angulares dos 3 atuadores de
c˜
cada perna do robˆ quadr´pede.
o
u
1
Min
−42, 5o
Max
57, 5o
Atuador
2
Min Max
−90o
0o
3
Min
−60o
Max
12o
Utilizando um vetor de pesos F = [1 2 1 1] (Maiores
detalhes sobre o vetor F podem ser vistos no Apˆndice
e
C), um Tmin = 0, 28 s e um Tmax = 1 s, obteve-se o
resultado cujo progresso est´ representado na Figura 7
a
atrav´s de trˆs gr´ficos, onde:
e
e
a
• o primeiro gr´fico mostra o hist´rico das taxas de
a
o
convergˆncia (T xc) do vetor PT e das matrizes Pf
e
e Pφ (a taxa de convergˆncia do vetor PT ´ definida
e
e
pelo seu valor m´ximo e a taxa de convergˆncia das
a
e
matrizes Pf e Pφ ´ definida pela m´dia dos valores
e
e
m´ximos de todas as suas colunas);
a
• O segundo gr´fico apresenta a m´dia m´vel com
a
e
o
20 itera¸oes das velocidades V ao longo do treinac˜
mento. Para se obter a m´dia m´vel com N itee
o
ra¸oes, o seu elemento i corresponde a m´dia dos
c˜
` e
resultados obtidos na itera¸ao i − N + 1 a itera¸ao
c˜
`
c˜
i;
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-9-320.jpg)
![• O ultimo gr´fico mostra a porcentagem m´vel de
´
a
o
quedas detectadas com 50 itera¸oes. A porcentac˜
gem m´vel ´ obtida de forma an´loga a m´dia m´o
e
a
` e
o
vel, ou seja, o elemento i corresponde a porcenta`
gem das quedas verificadas na itera¸ao i − N + 1 a
c˜
`
itera¸ao i. J´ a queda do robˆ ´ identificada quando
c˜
a
oe
a posi¸ao do seu CM em rela¸ao ao eixo z atinge
c˜
c˜
uma altura de 0 m.
Figura 8: Fun¸oes de referˆncia angular obtidas pelo processo
c˜
e
de aprendizado para o robˆ quadr´pede.
o
u
na mesma diagonal est˜o em fase (pernas 1 e 4 e pernas
a
2 e 3). A numera¸ao das pernas do robˆ quadr´pede ´
c˜
o
u
e
apresentada na Figura 6.
A Tabela 3 mostra a medida de desempenho da solu¸ao
c˜
obtida pelo processo de aprendizado (componentes do
vetor J) para o robˆ quadr´pede simulado2 .
o
u
Figura 7: Progresso do aprendizado do robˆ quadr´pede ao
o
u
longo do treinamento.
O primeiro gr´fico da Figura 7 mostra que o per´
a
ıodo do
passo (T ) foi o primeiro parˆmetro a convergir, seguido
a
pelas defasagens (vetor φ) e pelos pontos que descrevem
a
as fun¸oes de referˆncia (f1 (t)).
c˜
e
Seguindo a an´lise do processo de aprendizado, o sea
gundo e o terceiro gr´ficos confirmam o progresso veria
ficado no anterior. Neles verifica-se que a m´dia m´vel
e
o
da velocidade do robˆ aumenta a medida que as taxas
o
`
de convergˆncia aumentam enquanto que a porcentagem
e
m´vel de quedas diminui.
o
Tabela 3: Medida de desempenho da solu¸˜o obtida pelo proca
cesso de aprendizagem para o robˆ quadr´pede simulado.
o
u
V
27, 87 cm
s
IV
0, 14 rad
s
IW
0, 27 m
s
τmax
26, 21N m
Ec
0, 44J
Ao aplicar a solu¸ao obtida pelo processo de aprendizado
c˜
no robˆ real2 (Figura 9), obteve-se uma velocidade de
o
26, 60 cm/s, ou seja, cerca de 95% da velocidade obtida
na simula¸ao.
c˜
Como o robˆ real n˜o possui sensores, atualmente n˜o
o
a
a
h´ como verificar o m´ximo torque exigido, a potˆncia
a
a
e
m´dia e as taxas de varia¸oes das velocidades lineares e
e
c˜
angulares ao executar o movimento no robˆ real.
o
Ap´s a convergˆncia do processo de aprendizado, que
o
e
ocorreu com 5108 itera¸oes, o per´
c˜
ıodo T foi ajustado
1
2
3
para 0, 32 s e obteve-se as fun¸oes f1 (t), f1 (t) e f1 (t)
c˜
apresentadas na Figura 8 para as juntas 1, 2 e 3 (respectivamente as juntas do quadril, joelho e tornozelo da
perna do robˆ).
o
Com as caracter´
ısticas apresentadas na Tabela 4, o robˆ
o
tr´
ıpode corresponde a uma morfologia com maior dificuldade para determinar o modo de caminhar quando
O processo de aprendizado tamb´m ajustou a defasagem
e
das 4 pernas para [0 2 2 0], ou seja, as 2 pernas traseiras
(pernas 1 e 2) est˜o defasadas 180o entre si e as pernas
a
2 O caminhar obtido para o robˆ quadr´ pede simulado e para
o
u
o robˆ real s˜o mostrados nos v´
o
a
ıdeos dispon´
ıveis em:
ftp://labattmot.ele.ita.br/ele/jeeves/videos/C&A2011_4ps.wmv
ftp://labattmot.ele.ita.br/ele/jeeves/videos/C&A2011_4pr.wmv
5.2
Robˆ M´vel Tr´
o o
ıpode
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca
87](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-10-320.jpg)
![• 4 pontos para a fun¸ao de referˆncia de cada um
c˜
e
dos 3 atuadores da perna de referˆncia do Grupo 1
e
(sub-total: 12 vari´veis), e
a
• o mesmo que o item anterior para a perna de referˆncia do Grupo 2.
e
Figura 9: Comportamento verificado no quadr´pede real com
u
as fun¸oes obtidas no aprendizado.
c˜
comparado ao robˆ quadr´pede. O principal fator que
o
u
aumenta essa complexidade corresponde ao fato de que,
para uma postura estaticamente est´vel, h´ a necessia
a
dade das trˆs pernas estarem em contato com a supere
f´
ıcie de suporte. Assim, quando uma perna do robˆ
o
tr´
ıpode ´ levantada do ch˜o para executar o movimento
e
a
de caminhar, a postura do robˆ fica inst´vel.
o
a
Utilizando um vetor de pesos F = [1 0 1 1], um
Tmin = 0, 76 s e um Tmax = 1 s, obteve-se a evolucao apresentada na Figura 10 onde ´ mostrada a maior
¸˜
e
dificuldade para a convergˆncia do processo de aprendie
zado nesse caso quando comparado ao caso do robˆ quao
dr´pede. Nesse procedimento foram necess´rios 11458
u
a
itera¸oes para que o algoritmo de aprendizado atingisse
c˜
a convergˆncia em todas as vari´veis envolvidas na coe
a
ordena¸ao das pernas do robˆ.
c˜
o
Tabela 4: Caracter´
ısticas do robˆ tr´
o ıpode.
Np
3
Na
3
Peso
(kg)
1, 05
Dimens˜es (cm)
o
X
Y
Z
11 22, 6
19
Outro fator que dificulta a convergˆncia do conhecie
mento ´ o n´mero de vari´veis a serem ajustadas. Ao
e
u
a
analisar a similaridade do robˆ, obt´m-se dois grupos
o
e
de pernas: a) o Grupo 1 ´ formado pelas pernas traseie
ras 1 e 2, e b) o Grupo 2 ´ formado apenas pela perna
e
dianteira 3 (pernas numeradas conforme Figura 6). A
Tabela 5 mostra os limites das posi¸oes angulares dos 3
c˜
atuadores dos 2 grupos de pernas.
Tabela 5: Limites das posi¸oes angulares dos 3 atuadores de
c˜
cada grupo de pernas.
Grupo
1
2
Atuador
3
2
1
3
2
1
Min
−150o
−90o
−90o
−12o
−90o
−90o
Max
150o
90o
90o
150o
90o
90o
Para este robˆ o processo de aprendizado precisa detero
minar 26 vari´veis:
a
• o per´
ıodo T ,
• a defasagem da perna 2 do Grupo 1,
88
Figura 10: Evolu¸˜o observada durante o processo de aprendica
zado para o robˆ tr´
o ıpode.
Como resultado da etapa de aprendizado, obteve-se
as curvas apresentadas na Figura 11 com um per´
ıodo
T = 0, 82 s, onde as juntas 1, 2 e 3 correspondem aos
atuadores superior, central e inferior, respectivamente.
Para o grupo de pernas 1 obteve-se uma defasagem nula
entre as pernas. Com essas caracter´
ısticas, o caminhar
obtido3 para o robˆ apresentou o desempenho ilustrado
o
pela Tabela 6.
3 O caminhar obtido para o robˆ tr´
o ıpode simulado e para o robˆ
o
real s˜o mostrados nos v´
a
ıdeos dispon´
ıveis em:
ftp://labattmot.ele.ita.br/ele/jeeves/videos/C&A2011_3ps.wmv
ftp://labattmot.ele.ita.br/ele/jeeves/videos/C&A2011_3pr.wmv
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-11-320.jpg)


![
RG
Rc
R=
0
0
se
se
se
se
Rc ≥ RG
RG > Rc > 0
Rc ≤ 0
o robˆ cair.
o
(C.1)
• PK ´ a estimativa de probabilidade de sucesso ap´s
e
o
o ajuste, e
J´ o valor de Rc ´ obtido atrav´s da Equa¸ao (C.2), onde
a
e
e
c˜
RP equivale ao limite de refor¸o inferior determinado
c
pelo projetista e fR representa a fun¸ao de refor¸o.
c˜
c
Rc = f R
RG − R P
2
+
RG + R P
2
• Pk−1 corresponde a cada uma das estimativas de
probabilidades de sucesso pr´vias das vari´veis see
a
lecionadas (Pf , PT e Pφ );
• F cc ´ um fator de corre¸ao de convergˆncia que tem
e
c˜
e
por finalidade equilibrar o tempo de aprendizado
entre as diferentes vari´veis que comp˜em a solu¸ao
a
o
c˜
testada.
(C.2)
A fun¸ao fR ´ calculada a partir da Equa¸ao (C.3), onde:
c˜
e
c˜
N
N
Nc
1. IV c , IW c , τmax e EcN c correspondem, respectivamente, as m´dias de IV , IW , τmax e Ec nas ultimas
`
e
´
N c itera¸oes que n˜o houve a queda do robˆ, sendo
c˜
a
o
N c determinado pelo projetista;
N
` e
2. V+ c corresponde a m´dia das velocidades obtidas
nas ultimas N c itera¸oes onde as m´dias das velo´
c˜
e
cidades Vx foram positivas;
3. F (Express˜o (C.4)) ´ um vetor de pesos onde o
a
e
projetista pode ajustar a influˆncia que cada elee
mento do vetor J tem sobre a fun¸ao fR ;
c˜
4. Cf r ´ uma constante calculada pela Equa¸ao (C.5)
e
c˜
que ´ utilizada para equilibrar fR de tal forma que
e
seu valor tenda a 0 quando os valores do vetor J
tenderem as m´dias das suas ultimas N c itera¸oes.
`
e
´
c˜
1 + FI
IW + IV
N
N
IW c
IV c
(C.6)
O valor de F cc ´ dado pela Express˜o (C.7), onde:
e
a
• T xc(Pi ) representa a taxa de convergˆncia da mae
triz de probabilidade, cujo valor ´ calculado como
e
sendo a m´dia das m´ximas probabilidades de cada
e
a
coluna existente na matriz Pi ;
• min(T xc) ´ o valor m´
e
ınimo dentre T xc(Pf ),
T xc(Pφ ) e T xc(PT ).
F cc =
1
T xc(Pi )
min(T xc)
T xc(Pi )
≤1
min(T xc)
T xc(Pi )
se
>1
min(T xc)
se
(C.7)
−Cf r
τmax + F
Ec
+ Fτ N c
Ec
τmax
EcN c
(C.3) Neste artigo, em ambos os estudos de caso realizados,
utiliza-se: N c = 20, RP = −20 e RG = 20.
F = [FV FI Fτ FEc ]
Cf r =
R
100F cc
Depois de ajustar as probabilidades dos parˆmetros e
a
defasagens utilizados na itera¸ao em quest˜o, todas as
c˜
a
probabilidades de cada coluna s˜o normalizadas fazendo
a
com que a sua soma resulte em 1.
x
1 + FV VN c
V+
fR =
PK = PK−1 1 +
1 + F (1)
1 + F (2) +
4
i=2 (F (i))
(C.4)
(C.5)
Determinado o refor¸o oriundo do comportamento gec
rado pelos parˆmetros e defasagens selecionados, ´ nea
e
cess´rio ajustar as probabilidades associadas a cada um
a
`
desses elementos. Para tal, utiliza-se a Equa¸ao (C.6),
c˜
onde:
ˆ
REFERENCIAS
Alexander, R. M. (1989). Optimization and gaits in the
locomotion of vertebrates, Physiological Reviews, v.
69, n. 4, pp. 1199-1227.
Belter, D., Skrzypczynski, P. (2010). A biologically
inspired approach to feasible gait learning for a hexapod robot, Applied Mathematics and Computer
Science, v. 20, pp. 69-84.
Revista Controle & Automa¸˜o/Vol.23 no.1/Janeiro e Fevereiro 2012
ca
91](https://image.slidesharecdn.com/mr4-131012194057-phpapp02/85/Mr4-14-320.jpg)












































