O documento discute grades computacionais e nuvens, apresentando um curso sobre o tema. O curso abordará conceitos de grades, modelos de programação, middleware de grades e ferramentas de nuvens computacionais.
Grades e Nuvens
(ou grades nas nuvens)
Alfredo Goldman
gold@ime.usp.br
IME - USP
31/07/2010 1
2.
Curso baseado emmaterial
existente
● Curso Jai de 2008
– Fabio Kon e Alfredo
● Curso SBAC de 2008
– Raphael Camargo, Fabio Kon e Alfredo
● Seminário de Cloud Computing
– Carlos Eduardo Moreira Santos
● Seminário de ferramentas de Cloud
Computing
– Gustavo Ansaldi Oliva
31/07/2010 2
Grades Computacionais:
Conceitos Fundamentais e
Casos Concretos
Fabio Kon e Alfredo Goldman
Departamento de Ciência da Computação
IME – USP
Jornada de Atualização em Informática (JAI)
Congresso da SBC - Belém do Pará
15 e 16 de julho de 2008
31/07/2010 4
5.
Roteiro do minicurso
1) Histórico e Motivação
2) Conceitos Básicos
* Tipos de Grades
* Principais Serviços
3) Modelos de Programação
4) Middleware de grades
5) Grades em funcionamento
6) Pesquisa Atual em Grades
31/07/2010 5
6.
Pré-história das grades
● A necessidade de alto poder de
processamento existe há várias décadas.
● Na verdade, nasceu com a Computação.
● Na última década, tornou-se obrigatório para
várias ciências.
● All Science is Computer Science
– The New York Times 2001
31/07/2010 6
7.
Necessidades das ciências
● Problemas computacionalmente pesados
são muito presentes em
– Biologia
– Medicina
– Física
– Química
– Engenharia
● mas também são presentes em
– Ciências Humanas
– Economia
– Arte (música, gráfica)
31/07/2010 7
8.
Evolução das ciências
● Criou-se um círculo virtuoso que
– expande e melhora a qualidade do
conhecimento humano e
– testa os limites do que é possível realizar
computacionalmente.
● Lei de Moore implica que
– O computador pessoal de hoje é o
supercomputador da década passada.
– Segundo Jack Dongarra (30/06/10) em 2020:
● Celulares: teraflop
● Laptops: 10 teraflops
● Supercompuradores: hexaflop 8
31/07/2010
9.
Máquinas paralelas
● Década de 1980: computação de alto
desempenho era feita com caríssimas máquinas
paralelas
(às vezes chamadas de supercomputadores).
● Eram produzidas em quantidades pequenas
(centenas ou milhares).
● Tinham custo altíssimo.
● Acesso muito difícil.
31/07/2010 9
10.
Aglomerados (clusters)
● Década de 1990: computadores pessoais
popularizaram-se.
● Lei de Moore continuou agindo e levou milhões
de computadores potentes a universidades,
empresas e à casa das pessoas.
● Clusters com hardware de baixo custo.
– p.ex. Beowulf baseado em Linux.
31/07/2010 10
11.
O nascimento dasgrades
● Meados da década de 1990:
– Internet popularizou-se.
● Universidades e institutos de pesquisa com
– conexões locais estáveis de vários Mbps
– milhares de computadores
– dezenas de clusters
– conexões de longa distância estáveis.
● Necessidade de poder computacional
sempre crescendo.
31/07/2010 11
12.
A grande idéia
● Por que não interconectar aglomerados de
diferentes instituições através da Internet?
● Dificuldades:
– rede (Internet acadêmica)
– software
– protocolos
– middleware
– gerenciamento / administração
– ferramentas
– segurança
– heterogeneidade
31/07/2010 12
13.
Grade Computacional
● Nossa definição para Grade
(cada um tem a sua):
– Coleção de aglomerados geograficamente
distantes e interconectados através de uma rede
de forma a permitir o compartilhamento de
recursos computacionais e de dados.
– Esses aglomerados podem ser dedicados ou
não e podem possuir desde 1 até centenas de
computadores.
31/07/2010 13
14.
União de comunidades
● Meados da década de 1990:
Computação em Grade tornou-se uma área de
pesquisa combinando aspectos de:
– Sistemas Distribuídos
– Computação de Alto Desempenho
● Não era um conceito novo, revolucionário.
● Já se falava sobre isso há muitas décadas.
● O termo Computational Grid vem da analogia com
Power Grid, rede elétrica.
31/07/2010 14
15.
Precursores das grades
Desde a década de 1980, já se falava muito
em Sistemas Operacionais Distribuídos:
● Sprite (UCB [Ousterhout et al. 1988])
● NOW (UCB [Anderson et al. 1995])
● Amoeba (Holanda [Tanenbaum et al. 1990])
● Spring (Sun Microsystems, 1993)
● The V System (Stanford [Cheriton 1988])
31/07/2010 15
Já na comunidadeParalela
● Algoritmos paralelos [Leighton 1991]
● Máquinas paralelas [Leighton 1991]
– dedicadas com centenas ou milhares de
processadores
● Algoritmos de escalonamento [Bazewicz et
al. 2000]
● Memória compartilhada distribuída [Nitzberg
and Lo 1991]
31/07/2010 17
18.
Principais diferenças
Computação de alto
desempenho tradicional Grades computacionais
● Recursos dedicados ● Recursos compartilhados
● Configuração estática ● Configuração dinâmica
● Gerenciamento central ● Gerenciamento distribuído
● Ambiente controlado ● Ambiente não controlado
● Máquinas homogêneas ● Máquinas heterogêneas
31/07/2010 18
19.
Principais diferenças
Computação de alto
desempenho tradicional Grades computacionais
● Dezenas ou centenas de ● Dezenas de milhares de
máquinas máquinas
● Máquinas localizadas no ● Máquinas geograficamente
mesmo espaço físico distribuídas
● Falhas pouco freqüentes ● Falhas constantes
31/07/2010 19
20.
Principais Desafios
● Segurança
– Para os donos dos recursos
– Para os usuários da grade
● Tolerância a Falhas
– Para os componentes da grade
– Para as aplicações em execução na grade
● Escalonamento
– Determinar onde uma aplicação deve executar
● Gerenciamento
31/07/2010 20
21.
Tipos de
grades computacionais
● Grade de Computação
● Grade de Computação Oportunista
● Grade de Dados
● Grade de Serviços
– “Colaboratórios”
● Grades Móveis
31/07/2010 21
22.
Grades Computacionais
● Foco principal: solução de problemas
computacionalmente pesados
● Gerenciamento de recursos
– Busca de recursos computacionais
– Entrada e saída de recursos computacionais
● Gerenciamento de Aplicações
– Escalonamento e ciclo de vida
31/07/2010 22
23.
Grades de Dados
● Foco principal: gerenciamento e distribuição de
dados.
● Física de Altas Energia
– Dados gerados em um acelerador de partículas
são utilizados por pesquisadores do mundo todo.
– Precisam gerenciar Petabytes de dados
● Armazenamento e transmissão dos dados
● Tolerância a falhas (Replicação)
● Serviços de busca e diretórios de dados
31/07/2010 23
24.
Grades de Serviços
● Oferecem serviços viabilizados pela
integração de recursos na grade:
– Ambiente de trabalho colaborativo
– plataforma de aprendizado à distância
– Colaboratórios para experiências científicas
● A longo prazo, a tendência é que todos
esses tipos diferentes de grades serão
reunidos em uma única plataforma.
31/07/2010 24
Agente de acesso
● Ponto de acesso para os usuários
interagirem com a grade.
● É executado na máquina do usuário da
grade.
● Pode também ser um sistema Web
acessado a partir de um navegador.
● Deve permitir que o usuário determine a
aplicação a ser executada, os parâmetros da
execução e os arquivos de entrada.
31/07/2010 26
27.
Serviço local de
oferta de recursos
● Executado nas máquinas que exportam seus
recursos à Grade.
● Gerencia uso local de recursos.
● Responsável por executar aplicações nos
nós da Grade. Precisa então
– obter o arquivo executável
– iniciar execução
– coletar e apresentar eventuais erros
– devolver os resultados da execução
31/07/2010 27
28.
Serviço global de
gerenciamento de recursos
● Monitora o estado dos recursos da grade.
● Responde a solicitações por utilizações dos
recursos.
● Para tanto, pode utilizar outros serviços, tais
como.
– Serviço de informações sobre recursos
● coleta informações sobre recursos tais como
capacidade total e capacidade corrente de
processador, RAM, espaço em disco, largura de
banda, etc.
– Serviço de escalonamento
31/07/2010 28
29.
Serviço de escalonamento
● Determina onde e quando cada aplicação
será executada.
➔ Recebe solicitações de execução.
➔ Obtém informações sobre disponibilidade de
recursos.
➔ Ordena a execução das aplicações
31/07/2010 29
30.
Serviço de segurança
● Protege os recursos compartilhados,
evitando ataques aos nós da grade.
● Autentica os usuários de forma a saber
quem é responsável por cada aplicação e
por cada requisição de execução.
● Fornece canais seguros de comunicação e
de armazenamento de dados e aplicações
garantindo confiabilidade e integridade.
31/07/2010 30
Gerenciamento de recursos
● A principal tarefa de um SO é gerenciar e
proteger os recursos de uma máquina.
● A principal tarefa de um middleware de
grades é gerenciar e proteger os recursos de
uma grade
– i.e., um conjunto, potencialmente muito grande
de máquinas.
● O primeiro ponto é conhecer quais os
recursos disponíveis em cada instante.
31/07/2010 32
33.
Recursos mais comuns
● No contexto de alto desempenho, os
recursos mais explorados são:
– processador
– memória principal
● Mas em alguns casos, também são
fundamentais:
– conexões de rede
– armazenamento persistente (ex. discos)
31/07/2010 33
34.
Outros recursos
● Placas de processamento de áudio
● Compressores de vídeo
● Monitores de altíssima qualidade
● Telescópios eletrônicos
● Radiotelescópios
● Servidor de armazenamento com petabytes
● Sensores de temperatura, pressão,
luminosidade
● Et cetera.
31/07/2010 34
35.
Informações estáticas
de um recurso
● Processador
– tipo: PowerPC G5, Pentium 4.
– velocidade: 3,8 GHz.
● Sistema operacional
– tipo: Linux, Windows, MacOS, Solaris, Irix
– versão: Debian/kernel 2.6.20, NT, 10.5.3
● Memória principal e secundária
– RAM total de 8GB
– disco de 250GB
31/07/2010 35
36.
Informações dinâmicas
de um recurso
● Processador
– utilização= 34%
● Memória principal e secundária
– RAM disponível = 3,4 GB
– memória virtual disponível = 8,7 GB
– disco disponível = 232GB
31/07/2010 36
37.
Heterogeneidade
● Mas as grades são heterogêneas.
● Onde uma aplicação será executada mais
rapidamente?
1) Nó com PowerPC G5 de 2,0 GHz e 90% do
processador livre e 1GB de RAM livre ou
2) Nó com Pentium 4 de 3,8 GHz e 80% do
processador livre e 2GB de RAM livre.
31/07/2010 37
38.
Comparações de desempenho
em arquiteturas diferentes
● Pode-se usar ferramentas tais como bogomips
ou outros benchmarks.
● Mas ainda é um problema não totalmente
resolvido.
● O desempenho do processador também varia de
acordo com a aplicação.
– Há alguns anos processadores AMD eram mais
rápidos que os da Intel para processamento de texto
e mais lentos para processamento numérico.
31/07/2010 38
39.
Monitoramento
● Serviço local de oferta de recursos
1) monitora os recursos locais (ex. a cada 5 segundos)
2) envia dados sobre a máquina local para o serviço global
(ex. a cada 5 minutos ou mudanças significativas).
● O serviço global agrega as informações em bancos
de dados, potencialmente com informações sobre
milhares de nós.
● Serviço global pode ser centralizado, ou estruturado
de forma hierárquica, ou par-a-par, etc.
31/07/2010 39
40.
Federação de aglomerados
● Um grande desafio é estruturar o mecanismo de
monitoramento de forma que ele não se transforme
em um gargalo quando o sistema cresce.
● Grades modernas são organizadas em federações
de aglomerados estruturadas como árvores
hierárquicas ou estruturas P2P.
● Cada aglomerado possui seus gerenciadores
locais.
● A federação conta com protocolos inter-
aglomerados para monitoramento e
escalonamento.
31/07/2010 40
41.
Grades Computacionais:
Conceitos Fundamentaise Casos Concretos
Algoritmos de escalonamento e
escalonadores
Fabio Kon, Alfredo Goldman
Universidade de São Paulo
{kon,gold}@ime.usp.br
SBC - JAI - Belém - 15 e 16/7/08
42.
Roteiro
Definição de escalonamento
Nomenclatura e arquitetura
Algoritmos de Escalonamento
Exemplos de escalonadores
SLURM
OAR
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
2/15
43.
Escalonamento
Em inglês scheduling, corresponde ao estudo de como
alocar tarefas a recursos.
Tanto as tarefas como os recursos podem ser de
tipos diferentes ;
a alocação otimiza uma função de custo
previamente definida ;
mas, geralmente, esses problemas são difíceis.
Entre os vários tipos de tarefas podemos ter
processos, threads ou mesmo espaço em disco.
Recursos podem ser computacionais, de
armazenamento, de rede, etc,
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
3/15
44.
Um problema difícil1/2
Um exemplo simples da dificuldade do problema do
escalonamento é o problema da partição, que é
NP-Completo. Dados :
n e n inteiros I = {i1 , . . . , in }
Queremos dividir o conjunto I em dois conjuntos I1 e
I2 , I1 I2 = I e I1 ∩ I2 = ∅ tais que :
i= i
i∈I1 i∈I2
Dos problemas difíceis este é um dos mais fáceis
(pseudo-polinomial).
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
4/15
45.
Um problema difícil2/2
No nosso contexto, os inteiros ij podem ser vistos
como o tamanho de tarefas seqüenciais a serem
alocadas para duas máquinas idênticas.
É fácil imaginar que com tarefas paralelas e ambientes
dinâmicos, o problema fica bem mais difícil.
É interessante notar que existem problemas ainda
mais difíceis como a 3-partição :
Dados os inteiros positivos A = (a1 , . . . , a3t ) e B, existe
uma partição (T1 , . . . , Tt ) de A tal que |Tj| = 3 e
ai ∈Tj ai = B para j = 1, .., t ?
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
5/15
46.
O que fazercom problemas difíceis ?
Encontrar a solução exata de um problema difícil pode
levar muito tempo.
Quais as possíveis abordagens :
Aproximações : ao invés de buscar a solução ótima
procura-se encontrar uma solução que esteja a um
fator dela.
(ex. : no máximo 2 vezes o tempo da solução ótima)
Heurísticas : algoritmos que não fornecem
nenhuma garantia em relação à solução, mas que
podem funcionar em diversas situações.
Em grades, onde o ambiente é geralmente
heterogêneo e dinâmico, o melhor é procurar
aproximações e heurísticas.
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
6/15
47.
Nomenclatura
Definições geralmente usadas em escalonamento para
grades :
tarefa : unidade indivisível a ser escalonada
aplicação : conjunto de tarefas e aplicações
recurso : algo capaz de realizar alguma operação
sítio : unidade autônoma da grade, composta por
recursos
escalonamento de tarefas é um mapeamento, no
tempo, das tarefas para recursos.
Conceito importante : escalonamento válido (atentar
para as capacidades)
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
7/15
48.
Arquitetura genérica
Escalonador da
grade
Estimador
de custo Lançamento
Aplicações Monitoramento
Informações da
grade
Internet
Gerenciador de Gerenciador de
recursos local recursos local
Aplicações ... Aplicações
Locais Locais
recursos recursos
Domínio 1 Domínio N
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
8/15
49.
Algoritmos
Enquadram-se em dois possíveis contextos :
Estático : conhecimento total das aplicações a serem
submetidas antes do seu início.
Dinâmico : as aplicações podem aparecer a qualquer
momento ; as próprias tarefas das
aplicações podem não ser conhecidas.
Algoritmos estáticos existem mas são pouco
apropriados para grades :
recursos podem mudar ;
o tempo previsto de uma tarefa pode não
corresponder ao esperado ;
para certas aplicações, não é possível prever o seu
tempo de execução ;
o modelo estático pressupõe um conhecimento
total a priori.
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
9/15
50.
Algoritmos dinâmicos
Conforme estimativas, as tarefas são alocadas a
recursos.
Podem ser alocadas no momento de sua criação.
Para uma adaptação dinâmica usa-se balanceamento
de carga :
tentativa de distribuir o trabalho entre os
recursos ;
mais comum : roubo de trabalho (quem não tem,
busca)
1. Adaptabilidade ao ambiente.
2. Procura-se maximizar o uso dos recursos (ao invés
do tempo de término, que favorece um único
usuário).
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
10/15
51.
Escalonadores de grades
Duas abordagens principais :
Escalonadores completos (global + local).
Meta-escalonadores que conversam com
escalonadores locais.
Veremos dois :
SLURM (Lawrence Livermore National Laboratory,
início 2002)
OAR (Mescal Project - INRIA/UJF, início 2002)
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
11/15
52.
SLURM
Simple Linux Utility for Resource Management
aglomerados heterogêneos com milhares de nós
Linux
provê tolerância a falhas
oferece
1. controle de estado das máquinas
2. gerenciamento de partições
3. gerenciamento de aplicações
4. escalonador
5. módulos para cópia de dados
slurmd - executado em cada nó do sistema
slurmctld - executado no nó de gerenciamento
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
12/15
53.
SLURM (continuação)
Funções principais :
alocar recursos, de forma exclusiva, ou não, por
períodos determinados
fornecer um arcabouço para lançar, executar e
monitorar as aplicações nas máquinas
gerenciar uma fila de trabalhos pendentes no caso
de pedidos de uso conflitantes
Escalonador simples do tipo FIFO com prioridades
Diferencial : Alto desempenho (usado no BlueGene/L),
aceita plug-ins.
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
13/15
54.
OAR
Escalonador para aglomerados e grades
Permite a reserva de máquinas de uma grade por
usuários específicos.
Para ele, os recursos são as máquinas.
Possui comandos para :
1. submissão
2. cancelamento
3. consulta
Há controle de admissão e a aplicação é enfileirada.
É executada quando os recursos tornam-se
disponíveis.
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
14/15
55.
OAR (continuação)
Escalonamento modular, configurável pelo
administrador :
filas de submissão diferentes (prioridades)
casamento de recursos
backfilling (fura fila se não atrapalha)
Permite reservas
Existe uma versão para ambientes oportunistas
Diferencial : Simplicidade e modularidade. É usado no
Grid 5000.
Definição de escalonamento Nomenclatura e arquitetura Algoritmos de Escalonamento Exemplos de escalonador
15/15
56.
Segurança
● Com a popularização da Internet e a
conexão dos mais variados sistema a ela, a
Segurança se tornou um problema
fundamental.
● Grandes empresas investem quantias
vultosas para proteger seus sistemas de
ataques externos (e internos).
● Por sua natureza, grades computacionais
podem escancarar a porta de entrada aos
sistemas. Portanto, segurança é
fundamental.
31/07/2010 42
57.
Múltiplos domínios
● Grades podem cobrir diferentes domínios
administrativos.
● Isso dificulta o gerenciamento de
– usuários
– permissões
– controle de acesso
– contabilização de uso de recursos
– auditoria
– privacidade
31/07/2010 43
58.
Objetivos do
Serviço de Segurança
● Autenticação
– processo de estabelecer a validade de uma
identidade reivindicada;
– deve-se autenticar administradores, provedores
de recursos, provedores de aplicações, usuários
da grade.
● Confidencialidade
– impede que os dados sejam lidos ou copiados
por usuários que não têm esse direito.
– ex.: grades entre empresas ou bancos.
31/07/2010 44
59.
Objetivos do
Serviço de Segurança
● Integridade de Dados
– proteção da informação, evitando que ela seja
removida ou alterada sem a autorização de seu
dono.
● Disponibilidade
– proteção dos serviços, evitando que eles sejam
degradados a ponto de não poderem ser mais
usados.
– proteção a ataques de negação de serviço.
– ex.: usuário deve ser capaz de acessar o
resultado de suas computações e de executar
novas aplicações na grade.
31/07/2010 45
60.
Objetivos do
Serviço de Segurança
● Controle de Acesso
– permite que apenas usuários conhecidos, e com
os respectivos direitos de acesso, disponham
dos recursos da grade;
– o gerenciamento de direitos de acesso de
centenas de usuários em milhares de recursos
deve ser realizado de forma viável.
– mecanismos utilizados
● listas de controle de acesso
● certificados de direitos
● capacidades (capabilities)
● controle de acesso baseado em papéis (RBAC)
31/07/2010 46
61.
Objetivos do
Serviço de Segurança
● Auditoria
– registro de todas ações relevantes executadas
no sistema indicando quem fez o que e quando
– sistemas de segurança falham; a auditoria provê
formas de detectar quando a falha ocorreu, qual
falha ocorreu, etc.
– agentes inteligentes podem monitorar os
registros de forma a detectar intrusos.
● Irretratabilidade (non-repudiation)
– obtenção de provas (ou fortes indícios) das
ações de um usuário de forma que ele não as
31/07/2010 negue. 47
62.
Mecanismos de segurança
● Canais de comunicação seguros
– criados entre os nós da grade de forma que
dados não sejam roubados ou corrompidos
– atualmente, o meio mais comum é SSL (secure
socket layer) implementados por bibliotecas
como OpenSSH
● Armazenamento seguro de dados
– dados armazenados de forma persistente não
podem ser perdidos nem acessados por
usuários não-autorizados.
– Criptografia e proteção do SO local ajudam.
31/07/2010 48
63.
Mecanismos de segurança
● Sandboxing
– como um areião onde crianças brincam,
isola as aplicações do ambiente exterior; as
aplicações podem fazer a farra que quiserem
pois o estrago estará limitado;
– limitam
● uso de memória
● uso de disco (quantidade e porção do disco)
● uso do processador
● uso da rede (banda e aonde se conectar)
– A máquina virtual Xen [Barham et al. 2003] tem
sido muito usada para isso.
31/07/2010 49
64.
Tolerância a Falhas
● Grades são um ambiente altamente
dinâmico. Nós podem entrar e sair a
qualquer momento.
● Aplicações pesadas podem demorar horas,
dias, ou meses para serem executadas.
● Se um único nó de uma aplicação paralela
falha, toda a computação pode ser perdida.
● Portanto, tolerância a falhas é essencial !
31/07/2010 50
65.
Tolerância a falhas
● Além disso, os próprios nós que executam
os serviços da grade podem falhar.
● Portanto, é necessário que haja replicação
dos serviços essenciais da grade.
● Em ambos os casos, é necessário um bom
mecanismo para detecção de falhas.
● Este mecanismo deve informar o middleware
da grade em caso de falhas para que as
aplicações sejam reiniciadas ou os serviços
reestabelecidos.
31/07/2010 51
66.
Checkpointing
● Consiste em tirar fotografias do estado de
um processo de forma a constituir pontos de
salvaguarda.
● Permite reiniciar a aplicação de um ponto
intermediário de sua execução.
● Em aplicações seqüenciais é trivial.
● Em aplicações paralelas com comunicação
entre os nós é mais complicado.
31/07/2010 52
67.
Recuperação por Retrocesso
● Recuperação por retrocesso baseada em
checkpointing:
– Checkpoints contendo o estado da aplicações são
gerados periodicamente.
– Checkpoints são armazenados nas máquinas do
aglomerado.
– Em caso de falha durante a execução, o
middleware reinicia a aplicação a partir do último
checkpoint gerado.
31/07/2010 53
68.
Abordagens para checkpointing
● O estado de uma aplicação pode ser obtido de
diferentes modos.
● Checkpointing no nível do sistema (ex. CryoPID)
– Dados obtidos diretamente do espaço de memória
Transparente à aplicação
Requer uso de máquinas homogêneas
● Checkpointing no nível da aplicação
– Aplicação fornece dados a serem salvos
Checkpoints portáteis
Precisa modificar código-fonte da aplicação
31/07/2010 54
69.
Checkpointing de
Aplicações Paralelas
● Checkpoints locais → checkpoint global
● Aplicações paralelas desacopladas
– Aplicações bag-of-tasks
– Basta gerar um checkpoint para cada processo
● Aplicações paralelas acopladas
– Aplicações BSP e MPI
– Dependências entre processos
– É preciso coordenar a criação de checkpoints locais
31/07/2010 55
70.
Checkpointing de
Aplicações Paralelas
● Checkpoint 1 é inconsistente e 2 é consistente
● Protocolo coordenado de checkpointing
– Sincroniza os processos antes de gerar checkpoint
– Deste modo os checkpoints gerados são sempre
consistentes
31/07/2010 56
71.
Coordenado vs. assíncrono
● Checkpointing coordenado é relativamente
simples de implementar mas o desempenho
é pior.
● Checkpointing assíncrono permite que se tire
as fotografias sem interromper a execução
dos processos.
– mas é muito mais complexo.
– ainda não são usados no contexto de grades.
31/07/2010 57
72.
Grades Computacionais:
Conceitos Fundamentaise Casos Concretos
Modelos de Programação
Fabio Kon, Alfredo Goldman
Universidade de São Paulo
{kon,gold}@ime.usp.br
SBC - JAI - Belém - 15 e 16/07/08
73.
Roteiro
Preliminares
Paramétricas e saco de tarefas
SETI@home
Mersenne Prime Search
MPI
Programação MPI
BSP
Programação BSP
Outros modelos
OpenMP
KAAPI
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 2/38
74.
Modelos de Programação
Abstração da máquina de forma a simplificar a
representação da realidade.
Modelos mais próximos da realidade são muito
complexos.
Modelos excessivamente simplificados podem estar
longe da realidade.
É necessário um balanço entre a realidade e a
simplicidade.
Veremos alguns modelos úteis para representar
aplicações.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 3/38
75.
Modelos de Programação(analogia)
Modelos paralelos : LogP (e variantes), PRAM, . . .
Existem cursos específicos, como :
Topics in Parallel Algorithms using CGM/MPI -
Song, Cáceres e Mongelli, SBAC 03.
Modelos para Computação Paralela - Goldman,
ERAD 03.
Analogia com seqüencial
Mais simples : Modelo de Von Neuman
Mais complexo : considerar os tempos de acesso à
memória, caches de diversos níveis, etc.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 4/38
76.
Paramétricas e sacode tarefas
Aplicações paramétricas correspondem a uma classe
de aplicações idênticas que são executadas com
diferentes parâmetros.
Aplicações do tipo saco de tarefas (bag-of-taks)
correspondem a aplicações onde as tarefas a serem
executadas são completamente independentes umas
das outras.
A necessidade de comunicação entre tarefas é
mínima.
Duas comunicações
1. uma no início, quando são passados os parâmetros
iniciais
2. e uma ao término, quando os resultados são
transmitidos para serem combinados.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 5/38
77.
Escalabilidade
Como quase não há comunicação, um grande número
de máquinas pode ser usado.
A paralelização é simples (embarrassingly parallel).
Algumas áreas de aplicação :
mineração de dados
simulações de Monte Carlo
renderização distribuída
buscas com BLAST em bioinformática
aplicações em física de partículas
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 6/38
78.
SETI@home
Projeto SETI@home (setiathome.berkeley.edu)
computação voluntária
387 TeraFLOPS (jan/08)
busca de padrões em arquivos
possui sofisticados mecanismos de controle
BOINC
O sucessor deste projeto é o BOINC
(boinc.berkeley.edu) para aplicações saco de tarefas
genéricas.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 7/38
79.
Busca de Primos
Projeto de busca de número primos no formato 2n − 1
computação voluntária
www.mersenne.org
maior primo 232,582,657 − 1 (9,808,358 dígitos)
prêmio de 100 mil dólares para quem achar um
primo com 10 milhões de dígitos
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 8/38
80.
MPI
Message Passing Interface
Padrão criado pelo MPI Forum (www.mpi-forum.org)
Define interfaces, protocolos e especificações para a
comunicação paralela.
Principais objetivos :
Desempenho
Escalabilidade
Portabilidade
Apesar de ser de baixo nível , ainda é o padrão para
computação paralela mais utilizado.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 9/38
81.
Diferentes implementações
O MPI possui diferentes implementações, sendo as
mais conhecidas :
MPICH - Argonne National Laboratory
Open-MPI - (mantido por um consórcio) sucessor
do mpi-lan
Para atingir alto desempenho, existem implementações
específicas para diversas placas de rede
Versões principais :
MPI 1 (a partir de 1994) - troca de mensagens,
ambiente de tamanho fixo
MPI 2 (a partir de 1997) - criação dinâmica de
processos, operações em memória remota
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 10/38
82.
Troca de mensagens
É o principal modelo de comunicação em MPI.
Processos independentes com memórias locais trocam
informações através do envio de mensagens.
envio (MPI_Send())
recepção (MPI_Recv())
Existe a necessidade de sincronização
Existem sends e receives bloqueantes :
a instrução bloqueia o fluxo de execução.
Existem também instruções assíncronas :
a verificação da transmissão pode ser feita
posteriormente (MPI_Wait())
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 11/38
83.
Um programa
#include "mpi.h"
#include <stdio.h>
int main(int argc, char **argv) {
int rc;
rc = MPI_Init (&argc, &argv);
if (rc == MPI_SUCCESS) {
printf ("MPI iniciou corretamente.n");
}
MPI_Finalize ();
return 0;
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 12/38
84.
Execução de umprograma
Para compilar executar um programa existem comandos
como o mpicc e o mpiexec.
No caso acima, após a compilação, temos o comando
mpirun [ -np X ] <program> que executa X cópias do
programa no ambiente.
O número de mensagens do programa anterior
depende de quantas cópias serão lançadas.
Os processos são distribuídos (round-robin) entres as
máquinas disponíveis no ambente.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 13/38
85.
Conceitos do MPI
Em MPI, é possível definir comunicadores que
correspondem a abstrações que permitem a processos
relacionados trocar mensagens.
O mais comum é o MPI_COMM_WORLD que é comum a
todos os processos lançados através de mpiexec
As duas instruções seguintes são bem úteis :
MPI_Comm_size (comm, *number) dado um
comunicador, fornece sua quantidade de
processadores.
MPI_Comm_rank (comm, *id) devolve o número do
processo corrente dentro do comunicador
Isso deve ficar claro com o próximo exemplo.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 14/38
86.
Um programa com comunicador
int main(int argc, char **argv) {
int num_of_processes, rank, rc;
rc = MPI_Init (&argc, &argv);
if (rc == MPI_SUCCESS) {
MPI_Comm_size (MPI_COMM_WORLD, &num_of_processes);
MPI_Comm_rank (MPI_COMM_WORLD, &rank);
printf ("Sou o processo %d de %dn", rank,
num_of_processes);
}
MPI_Finalize ();
return 0;
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 15/38
87.
Forma de programação
O modelo de programação em MPI é o SPMD Single
Program Multiple Data.
Nesse modelo, existe um único programa e, conforme
váriaveis locais, o comportamento muda.
Uma das variáveis locais usadas é o id do processo.
Com um simples esquema podemos definir que um
mestre envia trabalho aos outros nós.
if(id == 0}
// envia trabalho
else
// recebe e executa
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 16/38
88.
Sintaxe para oenvio
Vejamos um programa onde um processador envia uma
mensagem a outro.
Para isso, usaremos o MPI_Send (síncrono)
int MPI_Send(void *buf, int count, MPI_Datatype datatype,
int dest, int tag, MPI_Comm comm )
Input Parameters
buf: initial address of send buffer
count: number of elements in send buffer
datatype: datatype of each send buffer element
dest: rank of destination
tag: message tag
comm: communicator
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 17/38
89.
Sintaxe para arecepção
Sintaxe do MPI_Recv (síncrono)
int MPI_Recv(void *buf, int count, MPI_Datatype datatype,
int source, int tag, MPI_Comm comm,
MPI_Status *status )
Output Parameters
buf: initial address of receive buffer
status: status object
Input Parameters
count: maximum number of elements in receive buffer
datatype: datatype of each receive buffer element
source: rank of source
tag: message tag
comm: communicator
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 18/38
90.
Sincronismo
No caso da recepção síncrona, o comando bloqueia o
fluxo até a recepção completa da mensagem.
Para o envio síncrono, o comando bloqueia o fluxo em
um de três pontos :
Até o envio completo da mensagem.
Isto é, a mensagem foi repassada para uma outra
camada que não o MPI.
Até a recepção da mensagem pelo nó destinatário.
A mensagem é recebida pela máquina em que o
processo destino se encontra.
Até a recepção pelo processo destinatário.
A mensagem é efetivamente recebida pelo
processo.
Não existe na especificação a determinação de onde
ocorre o bloqueio.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 19/38
91.
Uma troca demensagens
int main(int argc, char **argv) {
int numtasks, rank, dest, source, rc, count, tag = 1;
char inmsg, outmsg; MPI_Status Stat;
MPI_Init (&argc, &argv);
...
if (rank == 0) {
dest = 1;
outmsg = ’x’;
printf ("Enviando caractere %c para proc %dn", outmsg, dest);
rc = MPI_Send (&outmsg,1, MPI_CHAR, dest, tag, MPI_COMM_WORLD);
}
else if (rank == 1) {
source = 0;
rc = MPI_Recv (&inmsg, 1, MPI_CHAR, source, tag,
MPI_COMM_WORLD, &Stat);
printf ("Recebi o caractere: %c do proc %dn", inmsg, source);
}
MPI_Finalize ();
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 20/38
92.
Comunicação em grupo
Além da possibilidade de troca de mensagens entre
pares de processadores, o MPI oferece possibilidades
para a comunicação entre grupos de processadores.
As mais comuns são :
Difusão - de um para todos os processos do grupo
Concentração - de todos os processos para um
Redução - aplica uma operação (ex. : soma) nos
dados recebidos de todos os processos
Troca completa - efetua uma troca completa de
mensagens entre todos os processos
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 21/38
93.
Sintaxe da redução
int MPI_Reduce (void *sendbuf, void *recvbuf, int count,
MPI_Datatype datatype, MPI_Op op, int root,
MPI_Comm comm )
Input Parameters
sendbuf: address of send buffer
count: number of elements in send buffer
datatype: data type of elements of send buffer
op: reduce operation
root: rank of root process
comm: communicator
Output Parameter
recvbuf: address of receive buffer
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 22/38
94.
Primitivas de comunicaçãode grupo
int main(int argc, char **argv) {
int rank, source = 0, dest = 0, rc;
int value, totalValue;
MPI_Init (&argc, &argv);
MPI_Comm_rank (MPI_COMM_WORLD, &rank);
if (rank == 0)
value = 10;
MPI_Bcast (&value, 1, MPI_INT, source, MPI_COMM_WORLD);
value *= rank + 1;
MPI_Reduce (&value, &totalValue, 1, MPI_INT, MPI_SUM,
dest, MPI_COMM_WORLD);
if (rank == 0)
printf ("Valor final calculado: %dn", totalValue);
MPI_Finalize();
return 0;
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 23/38
95.
MPI 2
Funcionalidades específicas de MPI 2 :
Um processo pode criar sub-processos
dinamicamente (em outras máquinas).
Operações de acesso a memória remota
(one-side-communications)
primeiro é necessário criar-se janelas
MPI_PUT() e MPI_GET()
além de outras primitivas de comunicação e
sincronização.
suporte para threads.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 24/38
96.
BSP
Bulk Synchronous Parallel Model
Modelo criado por Valiant [1990]
Objetivo : Portabilidade sem perder o desempenho.
Idéia : Separação explícita da computação e da
comunicação.
conceitos principais :
1. super-etapa
2. sincronização
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 25/38
97.
Esquema de execuçãoBSP
sincronização
computação
tempo
Parâmetros utilizados :
p --- número de processadores ;
l --- custo de uma sincronização global ;
g --- tempo para transmitir um byte pela rede.
Ou seja, g é a banda passante.
1
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 26/38
98.
Diferenciais do BSP
Vantagens :
Conhecendo-se p, l e g é possível estimar o tempo
de execução em diferentes plataformas.
Os pontos de sincronização criam estados globais
consistentes.
Desvantagem : com sincronizações globais
freqüentes, em alguns casos, os programas podem
perder escalabilidade.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 27/38
99.
Programando com BSP
Para obter um programa eficiente :
a carga de cálculo deve estar balanceada,
a comunicação deve ser limitada (quantidade de
dados),
deve-se usar poucas super-etapas.
Modelo semelhante : CGM Coarse Grained Multicomputers
Para a programação BSP pesquisadores (principalmente
da Oxford University) criaram a BSPlib em 1997.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 28/38
100.
Formas de comunicação
Duas formas :
acesso a memória remota -- Distributed Remote
Memory Addressing (DRMA)
troca de mensagens -- Bulk Synchronous Message
Passing (BSMP)
1. as mensagens são enviadas para a fila local do
processo remoto ;
2. cada processo pode acessar sua fila local.
Em DRMA para acessos à memória remota é
necessário registrar as regiões a serem acessadas
bsp_push_reg()
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 29/38
101.
BSPlib
Comandos da BSPlib :
bsp_begin (nprocs) --- inicia um programa BSP com
nprocs processos
bsp_end() --- final da parte paralela
bsp_pid() --- fornece o id do processo
bsp_nprocs() --- fornece o número total de processos
bsp_sync() --- delimitador de super-passos
Leitura e escrita em DRMA :
bsp_put() recebe id do destino, offset local, endereço no
destino e offset remoto
bsp_get() é semelhante
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 30/38
102.
Produto escalar 1/2
#include "BspLib.hpp"
int main (int argc, char **argv) {
int pid, nprocs = 4;
double produto,
*listaProdutos; // vetor local a cada processo
listaProdutos = (double *)
malloc (nprocs * sizeof (double));
bsp_begin (nprocs);
// registra memória a ser compartilha
bsp_push_reg (&listaProdutos, nprocs * sizeof(double));
pid = bsp_pid ();
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 31/38
103.
Produto escalar 2/2
// cálculo do produto com os pedaços de vetores locais
prod = calculaProdutoLocal (pid, nprocs);
// envia os resultados a todos os outros processos
for (int proc = 0; proc < bsp_nprocs( ); proc++)
// coloca em proc um valor (double) em
// listaProdutos usando pid como offset
bsp_put (proc, &produto, &listaProdutos,
pid, sizeof(double));
bsp_sync ( ); // final do super-passo
calculaProdutoEscalarFinal (listaProdutos);
bsp_end( );
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 32/38
104.
Troca de mensagens
Principais funções :
bsp_send(int pid,void *tag,void *payload,int
nbytes) -- envia uma mensagem de tamanho nbytes
contida em payload e com o identificador tag para a
fila de mensagens do processo pid.
bsp_set_tagsize(int *nbytes) -- define o tamanho
da tag como nbytes.
bsp_get_tag(int *status, void *tag) -- se houver
mensagens na fila, devolve o tamanho da próxima
mensagem em status e o conteúdo da tag da
mensagem em tag.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 33/38
105.
Troca de mensagens(continuação)
bsp_move(void *payload, int nbytes) -- copia o
conteúdo da primeira mensagem da fila em payload.
A variável nbytes representa o tamanho do buffer
apontado por payload.
bsp_qsize(int *packets, int *nbytes) -- devolve o
número de mensagens na fila em packets e o
tamanho total das mensagens em nbytes.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 34/38
106.
Produto escalar (troca de mensagens) 1/2
#include "BspLib.hpp"
int main(int argc, char **argv) {
int pid, nprocs = 4;
double produto;
double *listaProdutos = (double *) malloc(nprocs *
sizeof(double));
bsp_begin (nprocs);
pid = bsp_pid ();
produto = calculaProdutoLocal (pid, nprocs);
int tagsize = sizeof(int);
bsp_set_tagsize( &tagsize );
// envio do produto escalar local a todos os outros
for (int proc = 0; proc < bsp_nprocs( ); proc++)
bsp_send (proc, &pid, &produto, sizeof(double));
bsp_sync ( );
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 35/38
107.
Produto escalar (troca de mensagens) 2/2
for (int proc = 0; proc < bsp_nprocs( ); proc++) {
int messageSize, source;
bsp_get_tag (&messageSize, &source)
bsp_move( &listaProdutos[source], messageSize)
}
calculaProdutoEscalarFinal (listaProdutos);
bsp_end( );
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 36/38
108.
Modelo OpenMP
API proposta pela OpenMP Architecture Review Board (ARB)
para sistemas com memória compartilhada.
Versão inicial proposta em 1997, atualmente versão 3.0
(maio 2008).
Modelo de execução é baseado em fork-join.
Não existem instruções específicas para troca de
mensagens (a comunicação é baseada em memória
compartilhada).
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 37/38
109.
KAAPI
O Kernel for Asynchronous and Adaptive Parallel Interface
permite o desenvolvimento e execução de aplicações
distribuídas baseadas em fluxos de trabalho.
Começou a ser desenvolvida no projeto MOAIS do
LIG/INRIA em 2005, e é baseada em bibiotecas
anteriores do mesmo grupo.
O escalonamento das tarefas aos processadores
alocados é realizado dinamicamente.
Utiliza um algoritmo do tipo roubo de trabalho
(work-stealing).
Fornece tolerância a falhas através de checkpoints do
estado do fluxo de trabalho (não dos processos em si).
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 38/38
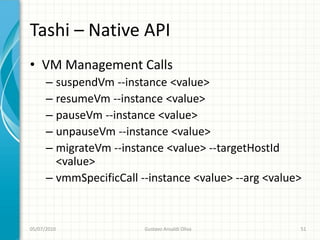
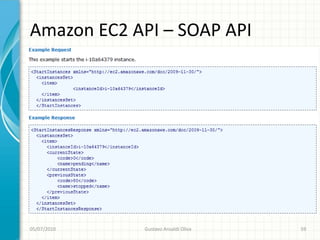
Globus
● O middleware de grade mais conhecido atualmente.
● Ian Foster e Carl Kesselman
● Argonne National Lab., University of Chicago, NCSA,
University of Illinois.
● Suas origens remontam o I-WAY
– grade temporária composta por 17 instituições
– apresentado no Supercomputing'95
31/07/2010 60
112.
Evolução do Globus
● versão 1.0: 1998 (uso interno)
versão 2.0: 2002 (disseminação mundial)
● versão 3.0: 2003 (comitê de padronização)
● versão atual: 4.0.5 pode ser baixada como software
livre de www.globus.org
● Padrão OGSA (Open Grid Services Architecture)
– conjunto de Web Services definidos pelo Open
Grid Forum.
31/07/2010 61
113.
Globus
● O middleware de grade mais conhecido atualmente
– Pode ser baixado gratuitamento (Versão 4.0.5)
– Padrão OGSA (Open Grid Services Architecture)
● Utiliza o conceito de Grid Services
– Comunicação baseada em Web Services
● Baixo acoplamento entre os recursos
● Desempenho ruim
– Adiciona funcionalidades a Web Services
● Descoberta de serviços
● Serviços nomeados
● Serviços com estado
31/07/2010 62
114.
Serviços do GT4
Serviçosdo Globus Toolkit 4:
● Monitoring and Discovery Service (MDS)
– Trigger: coleta dados de uso de recursos e dispara um
gatilho quando certas condições são satisfeitas.
– Index: agrega em um único índice centralizado um
conjunto de informações sobre recursos espalhados
pela rede
–
● Grid Resource Allocation and Management
(GRAM)
– responsável por localizar, submeter, monitorar e
cancelar a execução de tarefas
31/07/2010 63
115.
Serviços do GT4
● GridFTP
– permite a distribuição de arquivos na grade
● Replica Location Service
– registro e recuperação de réplicas
– mapeamento entre nomes lógicos e físicos
● Segurança
– credenciais X.509 para identificação de usuários,
serviços e recursos
– SSL para comunicação segura
– OpenSAML para gerenciamento de autenticação,
atributos e autorizações.
31/07/2010 64
116.
Serviços do GT4
● Bibliotecas de tempo de execução formam o
Common Runtime
– XIO para entrada e saída usando vários protocolos
– C Common Libraries unifica tipos e estruturas de dados
e chamadas ao sistema operacional
– bibliotecas de suporte a C, Java e Python.
31/07/2010 65
117.
OurGrid
● Um dos principais projetos brasileiros da
área.
● Universidade Federal de Campina Grande.
● Parceria e financiamento HP Labs.
● Middleware Java para execução de
aplicações seqüenciais do tipo saco de
tarefas (bag-of-tasks)
31/07/2010 66
118.
OurGrid
● Principal motivação:
– mecanismo simples para instalação e
configuração de grades
– (infra-estruturas mais usadas, p.ex., Globus,
demandam um grande esforço de configuração)
● Para tanto desenvolveu-se um mecanismo
simples baseados em redes par-a-par (P2P)
para estruturação da federação de
aglomerados.
31/07/2010 67
119.
OurGrid: redes defavores
● Usa o conceito de “rede de favores” para
determinar a prioridade dos usuários na
utilização de recursos.
● Quem oferece muitos recursos à Grade,
pode utilizar mais recursos da Grade.
● Essa abordagem facilita o gerenciamento,
evitando configurações manuais.
31/07/2010 68
120.
OurGrid: características
● Usa Xen para prover segurança mas não se
preocupa com privacidade ou criptografia.
● Intencionalmente, não possui um
escalonador global. O agente pessoal
MyGrid é responsável pelo escalonamento
das aplicações de um usuário.
● Está em produção desde dezembro de 2004
e reúne dezenas de laboratórios no Brasil e
no exterior.
31/07/2010 69
Grades Oportunistas
● Foco na utilização ciclos computacionais
ociosos estações de trabalho compartilhadas
– Máquinas de laboratórios, professores, etc.
– Deve manter a Qualidade de Serviço dos donos
das máquinas compartilhadas
– Máquina passa do estado ocioso para utilizada
● Aplicações da grade devem ser migradas para
outras máquinas
31/07/2010 71
123.
Grades Oportunistas
● Vantagens
✔ Baixo custo: utiliza hardware já existente
✔ Economia de recursos naturais
✔ Eletricidade, refrigeração, espaço físico
● Desvantagens
✗ Gerenciamento de recursos é mais complicado
✗ Menor desempenho: Utiliza apenas períodos
ociosos das máquinas
31/07/2010 72
124.
Exemplo: SETI@HOME
● Sistema de computação distribuída
– Análise de sinais de rádio-telescópios
– Objetivo é por procurar por padrões não-naturais
nos sinais obtidos
● Quebra o problema em blocos independentes
– Não existe comunicação entre os nós
● Distribui grupos de blocos a cada computador
– Computador realiza análise dos dados contidos nos
blocos recebidos
– Dados são enviados de volta a um servidor central
31/07/2010 73
125.
Exemplo: SETI@HOME
● Ótimo exemplo do poder computacional
– Desempenho total até Janeiro de 2006
● 7.745.000.000.000 Gflops
● Mais de 5 milhões de usuários
– Core 2 Duo (2.16GHz): ~ 3 Gflop/s (abril 2010)
● 730.000 Gflops por dia
● 5.100.000 Gflops por dia (Boinc)
– Computador mais rápido do mundo até 2007:
● Blue Gene/L (212.992 processadores)
● 478.200 GFlop/s
● 187 dias no Blue Gene/L ↔ Seti@Home
– Hoje: Jaguar
● 224.162 núcleos; pico: 2.331.000 GFlop/s
31/07/2010 74
126.
Exemplo: Folding@home
● Folding@home
– Sistema para realizar simulações computacionais
do enovelamento de proteínas
– Aplicações: cura de doenças, como o câncer,
Alzheimer, Parkinson, etc.
– Possui versão que pode ser executada em
Playstation 3.
31/07/2010 75
127.
Condor: um sistemapioneiro
● Grade oportunista
– Desenvolvido na University of Wisconsin-Madison
desde o final da década de 1980.
– Permite utilizar ciclos ociosos de estações de
trabalho compartilhadas.
● Condor pools: grupos de computadores
– Condor pools podem ser conectados entre si
● Hoje em dia possui suporte a aplicações
seqüencias, saco de tarefas e MPI.
31/07/2010 76
128.
Exemplo: Condor
● Computadores fazem anúncios dos recursos
disponibilizados
– Estes recursos são então monitorados pelo Condor.
● Aplicação é submetida para execução
– Match-maker repassa a execução a máquinas que
possuam os recursos necessários para executar a
aplicação.
● Caso uma máquina seja requisitada pelo dono
– Aplicação é migrada para outro nó.
– Limitação: aplicações paralelas rodam em nós
dedicados.
31/07/2010 77
129.
InteGrade: middleware para
grades oportunistas
● Iniciativa de 6 universidades brasileiras
– IME-USP, PUC-Rio, UFMS, UFG, UFMA e UPE
● Desenvolvido colaborativamente com o
software livre disponível em
www.integrade.org.br
● Implementado em Java, C++ e Lua.
● Comunicação baseada em CORBA.
● Suporte a aplicações C, C++, Fortran e Java.
31/07/2010 78
130.
Motivação
Desenvolver um middleware que permita
utilizar recursos ociosos de máquinas
compartilhadas já existentes nas instituições.
Objetivo é realizar a execução de aplicações
paralelas computacionalmente pesadas.
Armazenamento de dados de aplicações no
espaço livre em disco das máquinas
compartilhadas.
Importante para instituições com recursos
financeiros escassos.
Ambientalmente mais responsável. 79
131.
Características
Foco na utilização de computadores pessoais
Suporte a aplicações seqüenciais e paralelas
Saco de tarefas, BSP e MPI
Portal Web para submissão de aplicações
Armazenamento distribuído de dados
Em desenvolvimento:
Preservação da Qualidade de Serviço dos donos
de máquinas compartilhadas
Segurança baseada em redes de confiança 80
132.
Principais componentes
Global Resource Manager (GRM)
gerencia os recursos de um aglomerado
seleciona em quais máquinas cada aplicação
submetida será executada
Local Resource Manager (LRM)
gerencia uma máquina provedora de recursos
inicia a execução de aplicações na máquina
Application Repository (AR)
armazena os executáveis das aplicações dos
usuários
81
133.
Principais componentes
Application Submission and Control Tool (ASCT)
permite a submissão de aplicações e a obtenção e
visualização de resultados
Portal Web
versão Web da ferramenta ASCT
Local Usage Pattern Analyser (LUPA)
analisa o padrão de uso das máquinas da grade
permite ao escalonador realizar melhores escolhas
no momento de definir máquinas que executarão
uma aplicação
82
Federação de Aglomerados
Federação de aglomerados
Aglomerados conectados em estrutura hierárquica
Aglomerados possuem informações aproximadas sobre
recursos disponíveis em aglomerados filhos
84
Execução de Aplicações
1.Usuário submete aplicações através do Portal
Pode ser executado a partir de qualquer máquina
2. GRM determina em quais máquinas a aplicação
será executada (escalonamento)
3. Requisição é repassada para as máquinas
selecionadas
4. Máquinas obtêm dados de entrada e os binários
da aplicação e realizam sua execução
5. Após o término da execução, arquivos de saída
são enviados à máquina executando o portal
86
Execução Robusta deAplicações
Aplicações executadas durante ciclos ociosos
de máquinas não-dedicadas
Podem ficar indisponíveis ou mudar de ociosa para
ocupada inesperadamente
Execução da aplicação é comprometida
É preciso reiniciar a execução do início
Mecanismo de tolerância a falhas
Reinicia automaticamente a aplicação de um ponto
intermediário de sua execução
É totalmente transparente ao usuário 88
140.
Armazenamento Distribuído
Aplicações da grade podem utilizar ou produzir
grandes quantidades de dados
Dados de aplicações podem ser compartilhados
Abordagem tradicional: servidores dedicados
Grade oportunista
Máquinas com grandes quantidade de espaço livre
Ambiente altamente dinâmico
Composto por dezenas de milhares de máquinas
Utilizar somente períodos ociosos
Máquina entram e saem do sistema continuamente
89
141.
OppStore
Middleware que permite o armazenamento
distribuído de dados da grade
Provê armazenamento confiável e eficiente
Utiliza o espaço livre de máquinas compartilhadas
Organizado como federação de aglomerados
Similar à maioria das grades oportunistas
Aglomerados do OppStore são mapeados em
aglomerados da grade oportunista
Facilita o gerenciamento do dinamismo do sistema
Aglomerados conectados por uma rede par-a-par
90
142.
Arquitetura do OppStore
Repositório Autônomo de Dados (ADR)
Gerenciador de Repositórios de Dados (CDRM)
Intermediador de Acesso (Access Broker)
91
143.
Armazenamento de arquivos
Arquivos codificados em fragmentos redundantes
Fragmentos armazenados em aglomerados distintos
Vantagens
Maior tolerância a falhas
Bom desempenho, pois fragmentos são transferidos
em paralelo
92
144.
Implantação sobre oInteGrade
● CDRM → Máquina gerenciadora do aglomerado
● ADRs e Brokers → Provedores de recursos
● Interface com o InteGrade em desenvolvimento
145.
Estado Atual doInteGrade
Atualmente na versão 0.4.
Execução em 2 aglomerados e 2 laboratórios
compartilhados do IME-USP e em aglomerados
de outras universidades.
Permite execução de aplicações paralelas
MPI, BSP e paramétricas (saco de tarefas)
Precisam ser realizados mais testes
Para tal, precisa-se de mais usuários e aplicações
Contato:
integrade-support@integrade.org.br
94
www.integrade.org.br
146.
Grades Computacionais:
Conceitos Fundamentaise Casos Concretos
Grades em Funcionamento
Pesquisa Atual em Grades
Fabio Kon, Alfredo Goldman
Universidade de São Paulo
{kon,gold}@ime.usp.br
SBC - JAI - Belém - 15 e 16/07/08
147.
Roteiro
Preliminares
Grid 5000
PlanetLab
EGEE
Pesquisa atual em grades
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 2/18
148.
Grades em produção
Atualmente existem inúmeras grades em
funcionamento.
Escolhemos três tipos para ilustrar as possibilidades :
acadêmica
planetária
alto desempenho
Mas, existem outras, principalmente baseadas em
Globus, como TeraGrid e Open Science Grid.
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 3/18
149.
Grid 5000
Grade francesa para pesquisas em Ciência da
Computação.
Características principais :
INRIA, CNRS e vários outros orgãos financiadores
composta por 9 aglomerados na França
interligada por rede rápida e dedicada
cada aglomerado tem de 256 a 1000
processadores
ambiente estanque
1. experimentos reprodutíveis
2. segurança
3. conexões completamente conhecidas
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 4/18
Características
Ambiente heterogêneo
processadores AMD Opteron, Intel Itanium, Intel Xeon
e PowerPC
rede de interconexão Myrinet 2G, Myrinet 10G e
Infiniband
sistema operacional completamente configurável
O usuário pode escolher a imagem para
inicializar as máquinas.
Várias ferramentas :
injeção automática de falhas
injeção de tráfego na rede
medida de consumo de energia (início 7/08)
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 8/18
154.
Grid 5000 esuas conexões
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 9/18
155.
PlanetLab
Grade com máquinas em todo o planeta.
Projeto iniciado em 2002 e gerenciado pelas
universidades de Princeton, Berkeley e Washington.
Objetivo principal : desenvolvimento de serviços de
rede.
Conta com 895 nós em 461 localidades (7/08).
Conexão atraves da Internet pública.
Todas as máquinas executam o mesmo pacote de
software.
1. Mecanismos para reiniciar máquinas e distribuir
atualizações.
2. Ferramentas para monitorar os nós.
3. Gerenciamento de contas de usuários.
4. Distribuição de chaves.
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 10/18
Enabling Grids forE-science
Financiado pela união européia
Sucessor do Data-Grid
EGEE I (março 04) encerrado, EGEE II(abril 06)
Grade para aplicações científicas
Composta por 68 mil processadores, em 250 sítios
de 48 países (7/08)
8 mil usuários, processa mais de 150 mil aplicações
por dia
20 Petabytes de armazenamento
Disponível permanentemente
Usa o middleware gLite
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 12/18
158.
Aplicações na EGEE
Física de alta energia
1. maior utilização
2. vários projetos ligados ao Large Hadron Collider
Física de particulas espaciais
Fusão
Observatório da grade (coleta da dinâmica e do uso
da EGEE)
Ciências da terra (principalmente geologia)
Ciências da vida (imagens médicas, bioinfomática,
descoberta de drogas)
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 13/18
159.
EGEE Applications
High-Energy Physics
The HighaEnergy Physics (HEP) commua a
nity is one of the pilot application domains
in EGEE, and is the largest user of its grid
infrastructure.
At present, the major users are the four Fusion Commercial exploitation of fusion energy still needs to
solve several outstanding problems, some of which rea a
experiments (ALICE, ATLAS, CMS and quire a strong computing capacity. The International
LHCb) of the Large Hadron Collider (LHC), Thermo nuclear Experimental Reactor (ITER), a joint ina a
which will begin with the first proton-proton ternational research and development project, aims to
collisions in autumn 2008 and achieve the demonstrate the scientific and technical feasibility of fu- a
design luminosity in 2010. A magnet section from the 27km long LHC sion power and could potentially produce 500 MW of
ring
power by 2016. The exploitation of ITER requires a moda a
These four experiments are using grid reaa elling capability that is at the limit of the present state of
Simulation of a protonaproton collision at LHC energies
sources for largeascale production work inaa the art. Therefore, computing grids and high performance
volving more than 150,000 jobs/day on the computers are basic tools for fusion research.
EGEE infrastructure and in collaboration Presently several applications are already running on the
with its sister projects OSG in the USA and EGEE grid, namely Massive Ray Tracing, Global Kinetic
NDGF in the Nordic countries. Transport and Stellarator optimisation, that have helped
to open new avenues of research. A number of new apa a
Other major HEP experiments, such as plications devoted to ITER simulation will be ported to the
BaBar, CDF, DØ, H1 and ZEUS have also grid in close collaboration with EUFORIA project. Data
adopted grid technologies and use the A cutaway of the proposed ITER fusion reactor (Puba
a
management in large international experiments and the
lished with the permission of ITER)
EGEE infrastructure for routine physics development of complex workflows are the activities that
A Muon detector in the ATLAS cavern, CERN
data processing. The Collider Detector at Fermilab (CDF)
will complement grid computing.
Astro-Particle Physics Computational Chemistry
EGEE Applications and their support The Computational Chemistry and Gaussian
The community currently includes 17 institutes, virtual organizations were established to alaa
all contributing with applications ported to EGEE.
The Enabling Grids for E-sciencE (EGEE) project began by working with two scientific low access to chemical software packages on
The most relevant among them are Planck, MAGa a groups, High Energy Physics (HEP) and Life Sciences, and has since grown to support fora a the EGEE infrastructure. At present both freely
IC, SWIFT/MERCURY, and LOFAR. All of them mally astronomy, astrophysics, computational chemistry, earth sciences, fusion, and compua a available (GAMESS, COLUMBUS, DL_POLY,
share problems of computation involving largea ter science. The full user community runs applications from research domains as diverse as RWAVEP or ABCtraj) and commercial software
scale data acquisition, simulation, data storage, multimedia, finance, archaeology, and civil protection. Researchers in these areas collabo- a packages, including Gaussian, Turbomole and
and data retrieval that the grid helps to resolve. rate through Virtual Organisations (VOs) that allow them to share computing resources, coma a Wien2K, are used by chemists to understand
Planck and MAGIC have been in EGEE since mon datasets, and expertise via the EGEE grid infrastructure. End users can join existing better molecular properties, to model chemical
2004. The ESA Planck satellite, to be launched in reactions or to design new materials. The availaa
VOs or create new VOs tailored to their needs. Those with existing computing resources can
2008, will map the sky using microwaves, with an ability of chemical software is also beneficial
unprecedented combination of sky and frequency
also federate them with the EGEE grid infrastructure to facilitate load balancing with other for other communities as a source of molecular
coverage, accuracy, stability and sensitivity. The users and groups. data parameters for their simulations.
MAGIC telescope, on the island of La Palma in
the Canary Islands, is an imaging atmospheric To help the user community take advantage of the benefits of grid computing, EGEE pro- a
Cherenkov telescope that has been in operation vides a range of support services to its users: direct user support, Virtual Organisation (VO)
since late 2004. support, and application porting support. Through other activities, the project also provides
beginner and expert training on various topics
EGEE partner GridPP also produces a 3D (left) and 2D
(right)3d Grid monitor produced by GridPP. Downloads availa
The visualisation of the infrastructure. Both are available a
from http://gridportal.hep.ph.ic.ac.uk/rtm/.
able from http://gridportal.hep.ph.ic.ac.uk/rtm/ Grid Observatory
The application part of EGEE includes the Grid
Observatory. Its aim is to develop a scientific
view of the dynamics of grid behaviour and usa a
age. The Grid Observatory will make available
Getting Involved traces of users and middleware activity on the
grid for study by computer scientists, based
Details of how to join EGEE can be found on the User & Application portal at http://egeena4.lal.in2p3.fr/ on the existing extensive monitoring facilities.
Artist’s rendition of the ESA Planck Satellite The MAGIC telescope, La Palma These data will excite researchers in both the
(Copyright ESA 2002aIllustration Medialab) Members of business and industry are also encouraged to join the project. grid and machine learning areas and improve
EGEE runs an Industry Forum, hosts special Industry Days and works with industrial applications the connection between the EGEE project and
through an Industry Task Force, as well as collaboration with the commercial sector in the framework of computer science, with a specific impact sought
the EGEE Business Associate Programme. to the emerging field of autonomic computing.
For more details see the “EGEE and Business” section on www.euaegee.org. Modelling the dynamics of both the grid and the
user community will contribute to a better undera a
standing of the areas of dimensioning and caa a
Earth Sciences Life Sciences pacity planning, to performance evaluation, and
to the design of selfaregulation and maintenance
EGEE supports two related communities in the area of Earth Sciences: The life sciences are a major application area for the functionalities such as realatime fault diagnosis.
Research (ESR) and Geosciences (EGEODE). EGEE project and have been used to guide the implea a Eventually, the improved understanding of grid
mentation of the infrastructure from the start. With more activity may improve the reliability, stability, and
The applications of the ESR domain cover various disciplines. The most than 30 applications deployed and being ported, the doa a performance of the grid itself.
numerous applications are in seismology with the reaanalysis of the whole main had more than 200,000 jobs executed per month in
GEOSCOPE data set, the determination of the earthquake characterisa a 2007.
tics a few hours after the data arrival and numerical simulations of wave
propagation in complex 3D geological models. Several applications are • The medical imaging domain works on a number of
based on atmospheric modelling like the longarange air pollution transport related systems, many of them in the computeaintensive
Preliminares Grid 5000 PlanetLab EGEE Pesquisa of image coaregistration. This enables techniques
area
atual em grades
over Europe, the regional el Niño climate, and the ozone in polar regions.
such as ‘virtual biopsies’ for cancer diagnosis that avoid
In hydrology, applications include flood forecasting and the calculation of
14/18
sea water intrusion into coastal aquifers, both related to risk management. invasive surgical procedures.
160.
Pesquisa atual emgrades 1/3
Abaixo listamos alguns dos tópicos quentes em
pesquisa sobre grades :
1. Contabilidade e Economia de Grade
Como controlar a utilização dos recursos
computacionais pelos usuários ;
garantir justiça no compartilhamento ;
pagamento pela utilização de recursos ;
mercado de compra e venda de recursos.
2. Grades autônomas
Mecanismos adaptativos para gerenciamento e
QoS ;
Mecanismos para auto-otimização, auto-proteção,
configuração automática e tolerância a falhas
automática.
Segurança de fácil administração
(auto-gerenciamento).
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 15/18
161.
Pesquisa atual emgrades 2/3
3. Protocolos e algoritmos inteligentes para
federação de aglomerados e escalonamento global
O que fazer quando a visão global do sistema não é
possível ?
O uso único e informações locais podem levar ao
desperdício.
Como maximizar a utilização dos recursos neste
contexto ?
4. Escalonamento em grades
Buscar soluções que forneçam melhoras para todos
os participantes.
Para isso são necessárias regras de conduta.
Atualmente existem duas linhas principais : rede de
favores e teoria de jogos.
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 16/18
162.
Pesquisa atual emgrades 3/3
3. Melhor aproveitamento das novas arquiteturas de
hardware.
Arquiteturas multi-processadas são uma realidade.
Placas gráficas (GPUs) tem enormes capacidades de
processamento.
Como aproveitar melhor estes novos recursos em
grades ?
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 17/18
163.
Onde obter maisinformações ?
1. www.integrade.org.br Nosso projeto :-)
2. www.ourgrid.org Outra iniciativa de origem
nacional
3. www.globus.org The Globus Alliance
4. www.grid5000.fr Grid'5000
5. www.planet-lab.org PlanetLab
6. www.eu-egee.org Enabling Grids for E-sciencE
7. www.cs.wisc.edu/condor The Condor Project
8. www.legion.virginia.edu Legion : A Worldwide
Virtual Computer
9. www.teragrid.org TeraGrid
10. www.opensciencegrid.org Open Science Grid
11. boinc.berkeley.edu Open-source software for
volunteer computing and grid computing
Preliminares Grid 5000 PlanetLab EGEE Pesquisa atual em grades 18/18
164.
What Is It? Business Architecture Research Challenges Bibliography
Cloud Computing
Research Challenges Overview
Carlos Eduardo Moreira dos Santos
IME-USP, Brazil
May 3, 2010
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
165.
What Is It? Business Architecture Research Challenges Bibliography
Table of Contents I
1 What Is It?
Related Technologies
Grid Computing
Virtualization
Utility Computing
Autonomic Computing
Is It New?
Definition
2 Business
Business Model
Elasticity
Commercial Solutions
Amazon EC2
Google AppEngine
Microsoft Windows Azure
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
166.
What Is It? Business Architecture Research Challenges Bibliography
Table of Contents II
3 Architecture
Service Categories
4 Research Challenges
Automated Service Provisioning
Automated Service Provisioning
Energy Management
Server Consolidation
Virtual Machine Migration
Traffic analysis
Data Security
Software Frameworks
Novel Cloud Architecture
5 Bibliography
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
167.
What Is It? Business Architecture Research Challenges Bibliography
What Is Cloud Computing?
Some technologies are often compared to Cloud Computing and, in
fact, they share some characteristics.
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
168.
What Is It? Business Architecture Research Challenges Bibliography
Related Technologies
Grid Computing
Both make distributed resources available to an application.
A Cloud uses virtualization to
share resources,
provision resources dynamically.
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
169.
What Is It? Business Architecture Research Challenges Bibliography
Related Technologies
Virtualization
Abstracts details of hardware
Provides virtualized resources
Foundation of Cloud Computing
Virtualized resources are (re)assigned to applications
on-demand
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
170.
What Is It? Business Architecture Research Challenges Bibliography
Related Technologies
Utility Computing
Charges customers based on usage, like electricity.
Cloud providers can
maximize resource utilization
minimize operating costs
using
utility-based pricing
on-demand resource provisioning
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
171.
What Is It? Business Architecture Research Challenges Bibliography
Related Technologies
Autonomic Computing
IBM, 2001
Self-managing systems
Internal and external observations
No human intervention
Aims to reduce complexity
Cloud Computing
Automatic resource provisioning
Server consolidation
Aims to lower cost
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
172.
What Is It? Business Architecture Research Challenges Bibliography
Is It New?
Is It New?
Cloud Computing is not a new technology, but a new operations
model that combines existing technologies.
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
173.
What Is It? Business Architecture Research Challenges Bibliography
Definition
Definition
Cloud computing is a model for enabling convenient, on-demand
network access to a shared pool of configurable computing resources
(e.g., networks, servers, storage, applications, and services) that can
be rapidly provisioned and released with minimal management effort
or service provider interaction. [NIST, 2009]
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
174.
What Is It? Business Architecture Research Challenges Bibliography
Business
Illusion of infinite resources on demand
No up-front commitment
Ability to pay on a short-term basis
Lower
risks (hardware failure)
maintainance costs
hardware expenses (fabless companies)
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
175.
What Is It? Business Architecture Research Challenges Bibliography
Business Model
Business Model
Figure: Cloud Computing business model
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
176.
What Is It? Business Architecture Research Challenges Bibliography
Elasticity
Elasticity
Datacenters utilization
average: 5% to 20%
peak workload: 10% to 200%
Provisioning errors
Surges (Animoto - 50 to 3500 servers in 3 days)
DDoS example: 1 GB/s attack, 500 bots/EC2 instance
Attacker (week): 500, 000 bots × $0.03 = $15, 000
Cloud (hour): $360 + $100 (32 hours)
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
177.
What Is It? Business Architecture Research Challenges Bibliography
Commercial Solutions
Amazon EC2
Virtual Machines on top of Xen
Full control of software stack
Images can be used to launch other VMs
Conditions can trigger VM addition or removal
Multiple locations: US, Europe, Asia
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
178.
What Is It? Business Architecture Research Challenges Bibliography
Commercial Solutions
Google AppEngine
Platform for traditional web applications
Supports python and java
Non-relational database
Scaling is automatic and transparent
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
179.
What Is It? Business Architecture Research Challenges Bibliography
Commercial Solutions
Microsoft Windows Azure
Three components
1 Windows based environment (applications, data)
2 SQL Azure based on SQL Server
3 .NET Services for distributed infraestructure
Platform runs applications in the cloud or locally
Supports .NET, C#, VB, C++, etc
User must specify application needs to scale
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
180.
What Is It? Business Architecture Research Challenges Bibliography
Service Categories
Service Categories
Infraestructure as a Service (IaaS)
On-demand resources, usually VMs
Amazon EC2
Platform as a Service (PaaS)
Operating system support
Software development frameworks
Google App Engine
Software as a Service (SaaS)
On-demand applications over the Internet
Salesforce (CRM)
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
181.
What Is It? Business Architecture Research Challenges Bibliography
Service Categories
Layers
Figure: Architecture of Cloud Computing
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
182.
What Is It? Business Architecture Research Challenges Bibliography
Automated Service Provisioning
Automated Service Provisioning
Rejecting users
Resources
Capacity
Demand
Idle resources
1 2 3
Time (days)
Figure: Fixed capacity problems. Most of the time opportunities are lost
(red) or resources are wasted (yellow).
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
183.
What Is It? Business Architecture Research Challenges Bibliography
Automated Service Provisioning
Automated Service Provisioning
Resource (de-)allocation to rapid demand flunctuations.
1 Predict number of instances to handle demand
Queuing theory
Control theory
Statistical Machine Learning
2 Predict future demand
3 Automatic resource allocation
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
184.
What Is It? Business Architecture Research Challenges Bibliography
Energy Management
Energy Management
Problems:
Government regulations, environmental standards
53% of the cost is powering and cooling
Researches:
Energy-efficient hardware
Energy-aware job-scheduling
Server consolidation
Energy-efficient network protocols and infraestructures
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
185.
What Is It? Business Architecture Research Challenges Bibliography
Energy Management
Figure: HP Performance-Optimized Dataceter (POD): 40 feet and a
capacity of 3,520 nodes or 12,000 LFF hard drives.
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
186.
What Is It? Business Architecture Research Challenges Bibliography
Energy Management
Figure: HP POD inside.
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
187.
What Is It? Business Architecture Research Challenges Bibliography
Energy Management
Figure: On the left, Microsoft’s new $500 million Chicago data center.
On the right, NASA cloud computing application hosted in a container
and below it, IBM Portable Modular Data Center (PMDC).
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
188.
What Is It? Business Architecture Research Challenges Bibliography
Server Consolidation
Server Consolidation
Maximize servers in energy-saving state
VM dependencies (communication requirements)
Resource congestions
Variant of vector bin-packing problem (NP-hard)
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
189.
What Is It? Business Architecture Research Challenges Bibliography
Virtual Machine Migration
Virtual Machine Migration
Xen and VMWare ”live” VM migration (<1 sec)
Detecting hotspots versus sudden workload changes
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
190.
What Is It? Business Architecture Research Challenges Bibliography
Traffic analysis
Traffic analysis
Important for management and planning decisions
Much higher density of links
Most existing methods have problems here:
Compute only a few hundreds end hosts
Assume flow patterns (MapReduce jobs)
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
191.
What Is It? Business Architecture Research Challenges Bibliography
Data Security
Data Security
Confidentiality for secure data access and transfer
Cryptographic protocols
Auditability
Remote attestation (system state encrypted with TPM)
With VM migration, it is not sufficient
Virtualization platform must be trusted (SVMM)
Hardware must be trusted using hardware TPM
Efficient protocols are being designed
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
192.
What Is It? Business Architecture Research Challenges Bibliography
Software Frameworks
Software Frameworks
Large-scale data-intensive applications usually leverage MapReduce
frameworks.
Scalable
Fault-tolerant
Challenges:
Performance and resource usage depends on application
Better performance and cost can be achieved by:
Selecting configuration parameter values
Mitigating the bottleneck resources
Adaptive scheduling in dynamic conditions
Performance modeling of Hadoop jobs
Energy-aware:
A node should sleep while waiting new jobs
HDFS must be energy-aware, also
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
193.
What Is It? Business Architecture Research Challenges Bibliography
Novel Cloud Architecture
Novel Cloud Architectures
Small data centers can be more advantageous
Less power (cooling)
Cheaper
Better geographically distributed (interactive gaming)
Using voluntary resources for cloud applications
Much cheaper
More suitable for non-profit applications
Must deal with heterogeneous resources
Machines can be turned on or off at any time
How to incentivate resource donations?
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
194.
What Is It? Business Architecture Research Challenges Bibliography
Bibliography
Zhang, Q et al (2010)
Cloud computing: state-of-the-art and research challenges
Journal of Internet Services and Applications 1(1):7-18
Armbrust M et al (2009)
Above the Clouds: A Berkeley View of Cloud Computing
UC Berkeley Technical Report
Mell, Peter and Grance, Tim (2009)
The NIST Definition of Cloud Computing (v15)
http://csrc.nist.gov/groups/SNS/cloud-computing/
Data Center Knowledge
http://www.datacenterknowledge.com/archives/
category/technology/containers/
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing
195.
TOOLS FOR CLOUDCOMPUTING
Eucalyptus, OpenNebula and Tashi
Gustavo Ansaldi Oliva
goliva@ime.usp.br
golivax@gmail.com
Basic Concepts
• Virtualization
– Hypervisor
• A.K.A Virtual Machine Monitor (VMM)
• Allows multiple operating systems to run concurrently
on a host computer— a feature called hardware
virtualization
• The hypervisor presents the guest OSs with a virtual
platform and monitors the execution of the guest OSs
• Type 1/native/baremetal: Xen
• Type 2/hosted: VMWare Server, Sun VirtualBox
05/07/2010 Gustavo Ansaldi Oliva 3
198.
Basic Concepts
• Virtualization
– Hardware-assisted virtualization
• Processor instruction set extensions that provide
hardware assistance to virtual machines
• These extensions address the parts of x86 that are
difficult or inefficient to virtualize, providing additional
support to the hypervisor.
• Enables simpler virtualization code and a higher
performance for full virtualization.
• Intel VT-x, AMD-V
05/07/2010 Gustavo Ansaldi Oliva 4
199.
Basic Concepts
• Virtualization
– KVM
• Kernel-based Virtual Machine
• Full virtualization solution for Linux on x86 hardware
• Requires processor with Intel VT or AMD-V
• KVM does not perform any emulation by itself.
• User-space program uses the /dev/kvm interface to set up
the guest VM's address space, feeds it simulated I/O and
maps its video display back onto the host's
• KVM uses QEMU for its device emulation
05/07/2010 Gustavo Ansaldi Oliva 5
200.
Basic Concepts
• Clouds
– Public/External Cloud
• Commercial cloud providers that offer a publicly-accessible
remote interface to create and manage virtual machine
instances within their proprietary infrastructure
– Private/Internal Cloud
• Provides local users with a flexible and agile private
infrastructure to run service workloads within their
administrative domain
– Hybrid Cloud
• Supplements local infrastructure with computing capacity
from an external public cloud
05/07/2010 Gustavo Ansaldi Oliva 6
201.
Eucalyptus
• Owner
– Eucalyptus Systems
• License
– GNU GPL v3
• Latest Version
– 1.6.2 (February, 2010)
05/07/2010 Gustavo Ansaldi Oliva 7
202.
Eucalyptus
• Eucalyptus implementswhat is commonly referred to
as Infrastructure as a Service (IaaS)
– (Virtualization + Storage + Network) as a Service
• Eucalyptus is an open-source software infrastructure
for the implementation of cloud computing on
computer clusters which provides an interface that is
compatible with the Amazon EC2 service
• Eucalyptus is not fault-tolerant
– http://open.eucalyptus.com/forum/eucalyptus-specs-
scalability-fault-tolerance-and-slightl
05/07/2010 Gustavo Ansaldi Oliva 8
203.
Eucalyptus
• Eucalyptus workswith most of the currently
available Linux distributions
• Eucalyptus can use a variety of Virtualization
technologies including VMware, Xen and
KVM
• Eucalyptus offers a community cloud (ECC)
– Sandbox environment in which community
members can testdrive and experiment with
Eucalyptus
05/07/2010 Gustavo Ansaldi Oliva 9
204.
Eucalyptus
• Main features
– Compatibility with Amazon Web Services API
– Installation and deployment from source or DEB and
RPM packages.
– Secure communication between internal processes
via SOAP and WS-Security
– Basic administration tools
– Able to configure multiple clusters as a single cloud
– Added support for elastic IP assignment
– Configurable scheduling policies and SLAs
05/07/2010 Gustavo Ansaldi Oliva 10
Eucalyptus API
• Eucalyptususes Euca2ools
• Euca2ools are command-line tools for interacting with
Web services that export a REST/Query-based API
compatible with Amazon EC2 and S3 services.
• Euca2ools can be used with both Amazon's services
and with installations of the Eucalyptus open-source
cloud-computing infrastructure.
• Euca2ools were inspired by command-line tools
distributed by Amazon (api-tools and ami-tools) and
largely accept the same options and environment
variables.
05/07/2010 Gustavo Ansaldi Oliva 12
207.
Euca2ools
• Query ofavailability zones (i.e. clusters in Eucalyptus)
• SSH key management (add, list, delete)
• VM management (start, list, stop, reboot, get console
output)
• Security group management
• Volume and snapshot management (attach, list,
detach, create, bundle, delete)
• Image management (bundle, upload, register, list,
deregister)
• IP address management (allocate, associate, list,
release)
05/07/2010 Gustavo Ansaldi Oliva 13
Eucalyptus - UEC
•Core element of the Ubuntu Enterprise Cloud
(UEC) cloud computing module
– Included in Ubuntu Server Edition
– Wizards to build private and public clouds
– http://www.ubuntu.com/cloud/why-ubuntu
05/07/2010 Gustavo Ansaldi Oliva 16
211.
Setting Up PrivateCloud in UEC
• All-in-one controller
• One or more working nodes (run VM instances)
• 1) Prerequisites
– Front end
• Cloud controller (clc)
• Cluster controller (cc)
• Walrus (the S3-like storage service)
• The storage controller (sc)
– One or more nodes
• Node controller (nc)
• 2) Install the Cloud/Cluster/Storage/Walrus Front End
Server
05/07/2010 Gustavo Ansaldi Oliva 17
Setting Up PrivateCloud in UEC
• 3) Install the Node Controller
– Make sure that the node is connected to the network on
which the cloud/cluster controller is already running
– Boot from the same ISO on the node(s)
– Select “Install Ubuntu Enterprise Cloud”
– It should detect the Cluster and preselect “Node” install
for you
– Confirm the partitioning scheme
– The rest of the installation should proceed uninterrupted;
complete the installation and reboot the node
05/07/2010 Gustavo Ansaldi Oliva 23
218.
Setting Up PrivateCloud in UEC
• 4) Register the nodes
– In Ubuntu 10.04 all registration is automatic with
the UEC CD Install
• Public SSH keys have been exchanged properly
• The services are configured properly
• The services are publishing their existence
• The appropriate uec-component-listener is running
– Refer to the following link when doing a package
install
• https://help.ubuntu.com/community/UEC/CDInstall
05/07/2010 Gustavo Ansaldi Oliva 24
219.
Setting Up PrivateCloud in UEC
• 5) Obtain credentials
– After installing and booting the Cloud Controller,
users of the cloud will need to retrieve
their credentials
– This can be done either through a web browser,
or at the command line
• https://<cloud-controller-ip-address>:8443/
• Use username 'admin' and password 'admin' for the
first time login
05/07/2010 Gustavo Ansaldi Oliva 25
220.
Setting Up PrivateCloud in UEC
• 6) Install an image from the store
– Image Store on the UEC web interface
05/07/2010 Gustavo Ansaldi Oliva 26
221.
Setting Up PrivateCloud in UEC
• 7) Run an Image
– There are multiple ways to instantiate an image
in UEC:
• Use the command line
• Use one of the UEC compatible management tools
such as Landscape
• Use the ElasticFox extension to Firefox
– More info on
https://help.ubuntu.com/community/UEC/CDInstall
05/07/2010 Gustavo Ansaldi Oliva 27
222.
OpenNebula
• Main Contributors
– DSA (Distributed Systems Architecture) Research
at UCM (Universidad Complutense de Madrid)
– http://dsa-research.org/doku.php
• License
– Apache License v2 (2004)
• Latest Version
– 1.4 (December, 2009)
05/07/2010 Gustavo Ansaldi Oliva 28
223.
OpenNebula
• OpenNebula isan open-source toolkit to easily
build any type of cloud
• OpenNebula has been designed to be integrated
with any networking and storage solution and so
to fit into any existing data center.
– Private cloud with Xen, KVM and VMWare
– Hybrid cloud with Amazon EC2 and ElasticHosts
– Public cloud supporting EC2 Query, OGF OCCI and
vCloud APIs
• Apache License v2 (2004)
20/05/2010 Gustavo Ansaldi Oliva 29
OpenNebula – FaultTolerance
• Fault tolerance is managed by a persistent back-
end database (sqlite3), that stores the hosts and
their VM information
• All virtual machine images are stored in a Image
Repository accessible from the OpenNebula
front-end
• When a VM start request is made, the VM is
copied (cloned) to the cluster node which will
then run the VM. When the image is closed, its
copied back to the front-end
05/07/2010 Gustavo Ansaldi Oliva 32
227.
OpenNebula – FaultTolerance
• /srv/cloud/one hold the OpenNebula installation and the clones for the
running VMs
• /srv/cloud/images will hold the master images and the repository
• http://www.opennebula.org/documentation:rel1.4:plan#storage
05/07/2010 Gustavo Ansaldi Oliva 33
228.
OpenNebula – EC2Query API
• Implements a subset of the EC2 Query interface,
enabling the creation of public clouds managed by
OpenNebula
– upload image: Uploads an image to the repository manager
– register image: Registers an image (previously uploaded in the
repository manager) in order to be launched
– describe images: Lists all registered images belonging to one
particular user.
– run instances: Runs an instance of a particular image (that
needs to be referenced)
– terminate instances: Shutdown a virtual machine(or cancel,
depending on its state)
05/07/2010 Gustavo Ansaldi Oliva 34
229.
OpenNebula – EC2Query API
• Starting with a working installation of an OS residing on
an .img file, with three steps a user can launch it in the cloud
• 1) Upload image to the cloud image repository
• 2) Register the image to be used in the cloud
• 3) Launch the registered image to be run in the cloud
05/07/2010 Gustavo Ansaldi Oliva 35
230.
OpenNebula – EC2Query API
• Additionally, the instance can be monitored with:
05/07/2010 Gustavo Ansaldi Oliva 36
231.
OpenNebula – OCCIAPI
• The OpenNebula OCCI API is a RESTful service
to create, control and monitor cloud
resources based on the latest draftof the OGF
OCCI API specification
• OCCI stands for “Open Cloud Computing
Interface”
• Resources are: Storage, Network, Compute
05/07/2010 Gustavo Ansaldi Oliva 37
232.
OpenNebula – OCCIAPI
• Storage:
– Upload: using a multi-part HTTP POST.
– Retrieve: using a HTTP GET.
• Network:
– Upload: using a HTTP POST.
– Retrieve: using a HTTP GET.
• Compute:
– Upload: using a HTTP POST.
– Update: using a HTTP PUT.
– Retrieve: using a HTTP GET.
05/07/2010 Gustavo Ansaldi Oliva 38
Setting Up PrivateCloud with
OpenNebula and Ubuntu
• Six steps
– 1) Front-end installation
– 2) Add the cluster nodes to the system
– 3) Configure ssh access
– 4) Install the nodes Done on working nodes
– 5) Setting authorization Done on working nodes
– 6) Prepare Virtual Network and Launch VMs
• Please refer to
https://help.ubuntu.com/community/OpenNebula
20/05/2010 Gustavo Ansaldi Oliva 43
238.
Tashi
• Key Contributors
– Intel Labs Pittsburgh
– Carnegie Mellon University
• License
– Apache License v2 (2004)
• Latest Version
– No formal release (code must be checked out
from SVN)
05/07/2010 Gustavo Ansaldi Oliva 44
239.
Tashi
• An infrastructurethrough which service
providers are able to build applications that
harness cluster computing resources to
efficiently access repositories of “Big Data”
– Cluster management system for cloud computing
on big data
• Project incubated at Apache
– Non-trivial installation and setup
05/07/2010 Gustavo Ansaldi Oliva 45
240.
Tashi
• Tashi isprimarily a system for managing Virtual
Machines (VMs)
– Request the creation, destruction, and manipulation of
VMs (Xen, KVM/QEMU)
• Tashi also has a web client interface that is compatible
with a subset of Amazon Web Services
• Boot 100 copies of an operating system in 2 minutes
• Tashi is a key software component that enables the
Big Data cluster to participate in the HP
OpenCirrus cluster testbed as a Center of Excellence
05/07/2010 Gustavo Ansaldi Oliva 46
241.
Tashi
• Main features
– Provide high-performance execution over Big Data
repositories
Enable multiple services to access a repository
concurrently
– Enable low-latency scaling of services
– Enable each service to leverage its own software
stack
• Virtualization, file-system protections
– Enable slow resource scaling for growth
– Enable rapid resource scaling for power/demand
• Scaling-aware storage
05/07/2010 Gustavo Ansaldi Oliva 47
242.
Tashi – ExampleApplications
Application Big Data Algorithms Compute Style
Video search Video data Object/gesture MapReduce
identification, face
recognition, …
Internet library Historic web Data mining MapReduce
search snapshots
Virtual world Virtual world Data mining To be defined
analysis database
Earth study Ground model Earthquake HPC (high
simulation, thermal performance
conduction, … computing)
Language Text corpuses, Speech recognition, MapReduce &
translation audio archives,… machine translation, HPC
text-to-speech, …
05/07/2010 Gustavo Ansaldi Oliva 48
243.
Tashi – Organization
•Each cluster contains one Tashi Cluster Manager (CM)
• The CM maintains a database of:
– Available physical resources (nodes)
– Active virtual machines
– Pending requests for virtual machines
– Virtual networks
• Users submit requests to the CM through a Tashi Client
• The Tashi Scheduler uses the CM databases to invoke
actions, such as VM creation, through the CM
• Each node contains a Node Manager that carries out
actions, such as invoking the local Virtual Machine
Manager (VMM), to create a new VM, and monitoring
the performance of VMs
05/07/2010 Gustavo Ansaldi Oliva 49
Tashi – UsingEC2 API Tools
Tashi is compatible with a subset of Amazon Web Services
Elastic Fox
ec2-api-tools Client
QUERY SOAP
Apache
cgi-bin VM instance DB
QUERY -> SOAP Node Manager DB
Tashi Agent
Cluster Manager (CM)
05/07/2010 Gustavo Ansaldi Oliva 53
248.
Tashi
• More information
– Presentation: www.pittsburgh.intel-
research.net/~rgass/projects/sc09/SC09-Tashi-
CR.ppt
• Includes architecture diagrams of Tashi
– Tashi on a single test machine
• http://incubator.apache.org/tashi/documentation-
single.html
05/07/2010 Gustavo Ansaldi Oliva 54
249.
Tools Comparison
• Reportdone by Universiteit van Amsterdam
• Compares Cloud Computing Solutions and
offers guidance according to specific
scenarios
• http://staff.science.uva.nl/~delaat/sne-2009-
2010/p31/report.pdf
05/07/2010 Gustavo Ansaldi Oliva 55
![Precursores das grades
Desde a década de 1980, já se falava muito
em Sistemas Operacionais Distribuídos:
● Sprite (UCB [Ousterhout et al. 1988])
● NOW (UCB [Anderson et al. 1995])
● Amoeba (Holanda [Tanenbaum et al. 1990])
● Spring (Sun Microsystems, 1993)
● The V System (Stanford [Cheriton 1988])
31/07/2010 15](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-15-320.jpg)
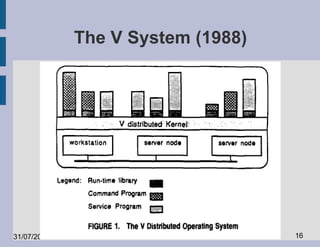
![Já na comunidade Paralela
● Algoritmos paralelos [Leighton 1991]
● Máquinas paralelas [Leighton 1991]
– dedicadas com centenas ou milhares de
processadores
● Algoritmos de escalonamento [Bazewicz et
al. 2000]
● Memória compartilhada distribuída [Nitzberg
and Lo 1991]
31/07/2010 17](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-17-320.jpg)
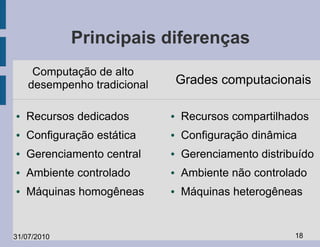
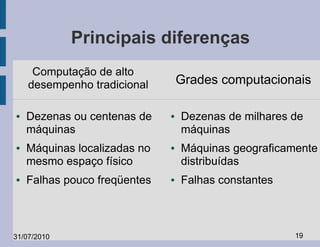
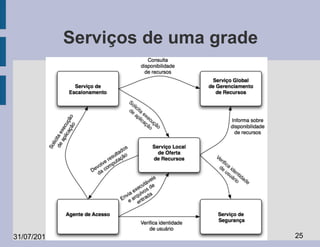
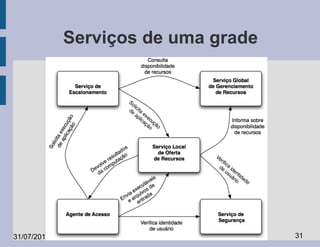
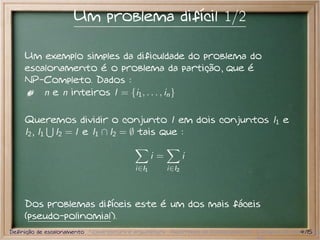
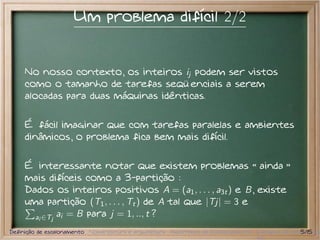
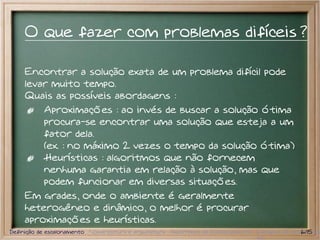
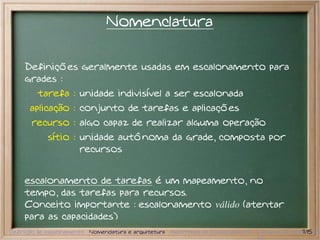
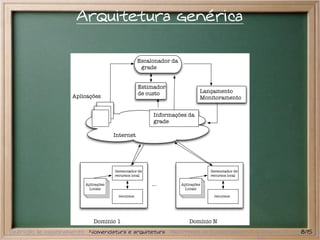
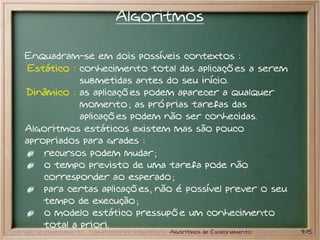
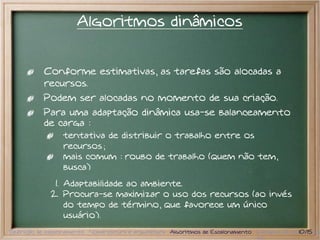
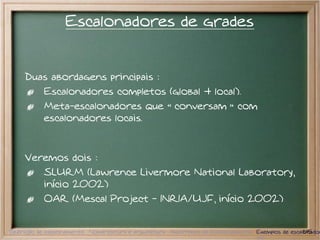
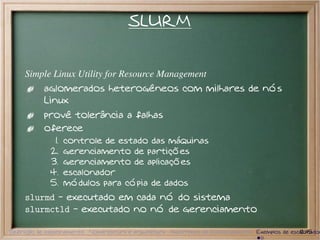
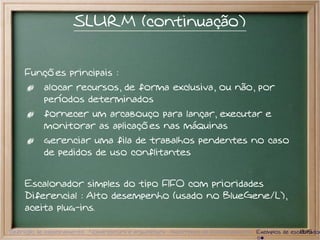
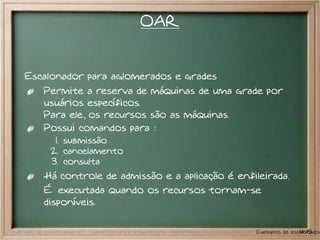
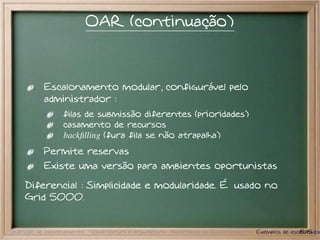
![Mecanismos de segurança
● Sandboxing
– como um areião onde crianças brincam,
isola as aplicações do ambiente exterior; as
aplicações podem fazer a farra que quiserem
pois o estrago estará limitado;
– limitam
● uso de memória
● uso de disco (quantidade e porção do disco)
● uso do processador
● uso da rede (banda e aonde se conectar)
– A máquina virtual Xen [Barham et al. 2003] tem
sido muito usada para isso.
31/07/2010 49](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-63-320.jpg)
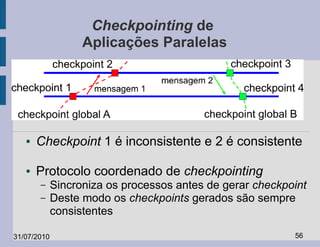

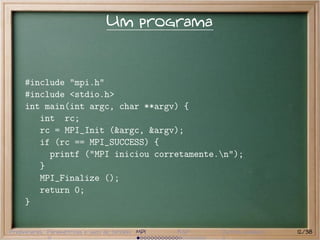
![Execução de um programa
Para compilar executar um programa existem comandos
como o mpicc e o mpiexec.
No caso acima, após a compilação, temos o comando
mpirun [ -np X ] <program> que executa X cópias do
programa no ambiente.
O número de mensagens do programa anterior
depende de quantas cópias serão lançadas.
Os processos são distribuídos (round-robin) entres as
máquinas disponíveis no ambente.
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 13/38](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-84-320.jpg)
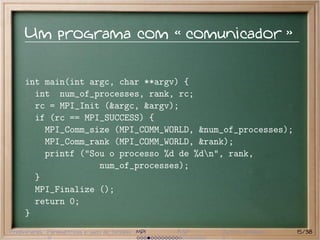
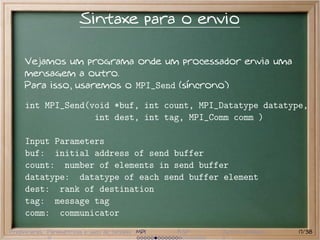
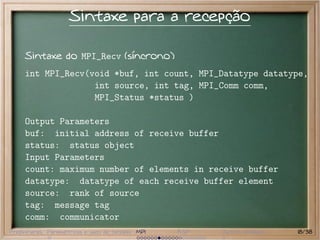

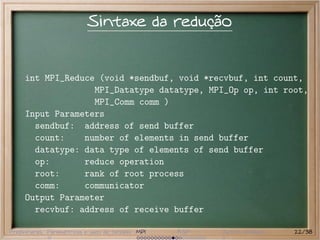
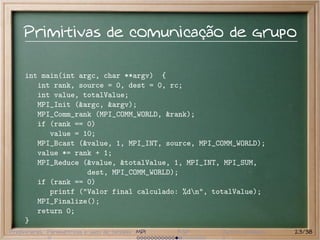
![BSP
Bulk Synchronous Parallel Model
Modelo criado por Valiant [1990]
Objetivo : Portabilidade sem perder o desempenho.
Idéia : Separação explícita da computação e da
comunicação.
conceitos principais :
1. super-etapa
2. sincronização
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 25/38](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-96-320.jpg)
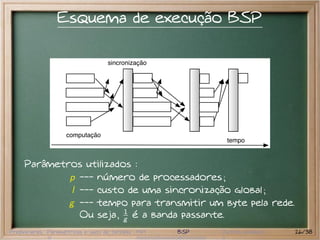
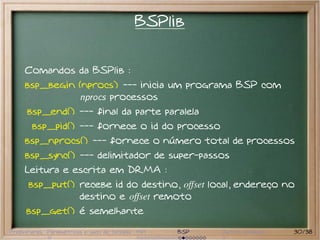
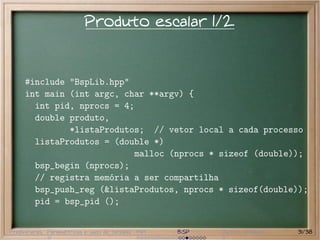
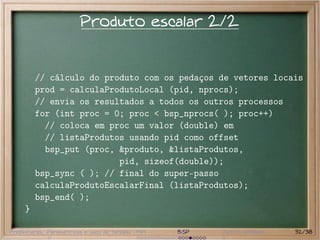
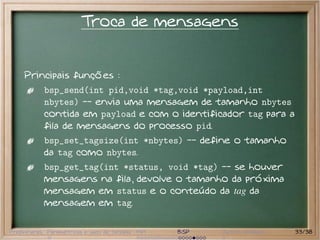
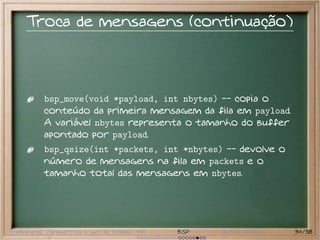
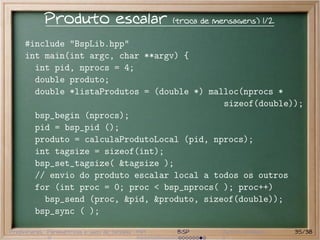
![Produto escalar (troca de mensagens) 2/2
for (int proc = 0; proc < bsp_nprocs( ); proc++) {
int messageSize, source;
bsp_get_tag (&messageSize, &source)
bsp_move( &listaProdutos[source], messageSize)
}
calculaProdutoEscalarFinal (listaProdutos);
bsp_end( );
}
Preliminares Paramétricas e saco de tarefas MPI BSP Outros modelos 36/38](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-107-320.jpg)
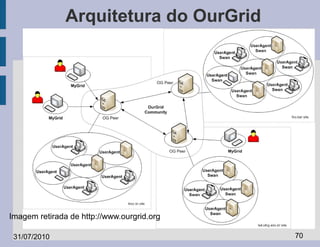
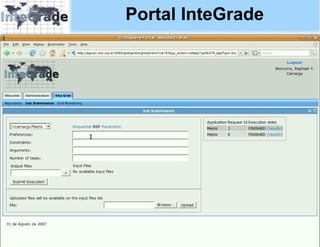
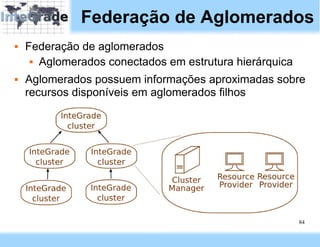
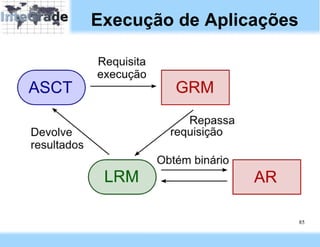
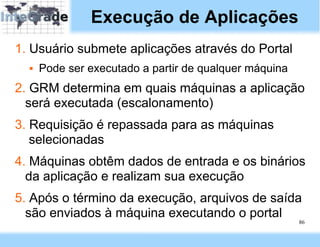
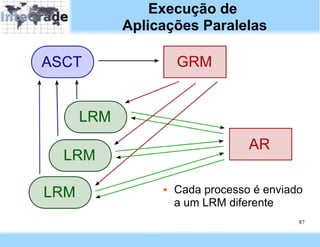
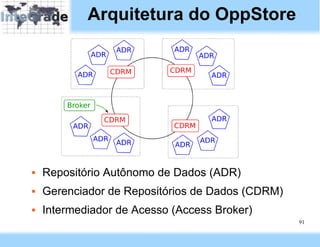
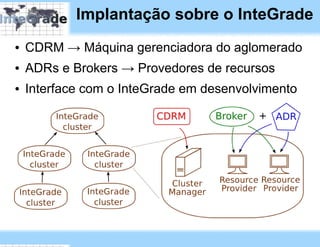
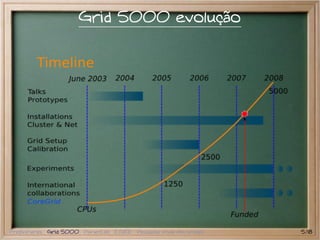



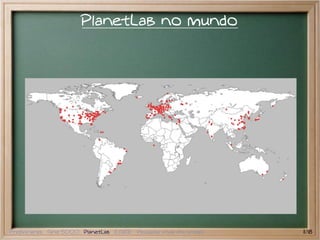
![What Is It? Business Architecture Research Challenges Bibliography
Definition
Definition
Cloud computing is a model for enabling convenient, on-demand
network access to a shared pool of configurable computing resources
(e.g., networks, servers, storage, applications, and services) that can
be rapidly provisioned and released with minimal management effort
or service provider interaction. [NIST, 2009]
Carlos Eduardo Moreira dos Santos IME-USP, Brazil
Cloud Computing](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-173-320.jpg)
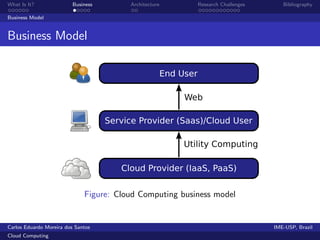
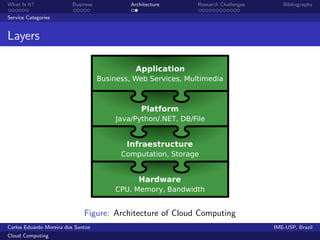
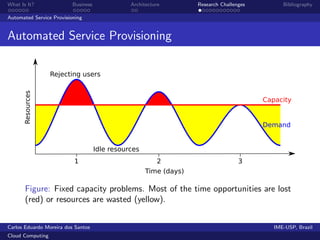
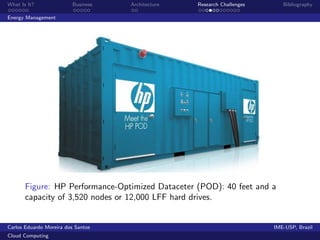
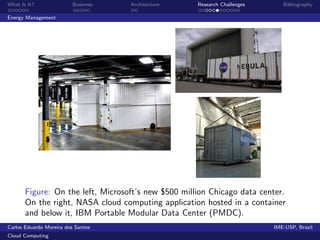
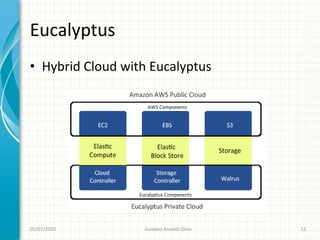
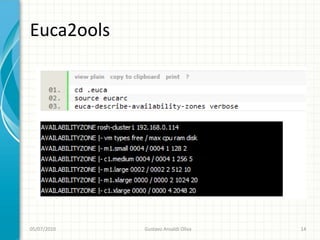
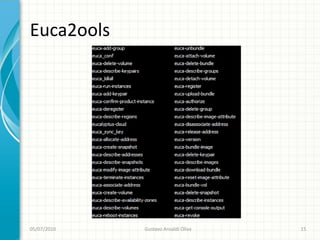
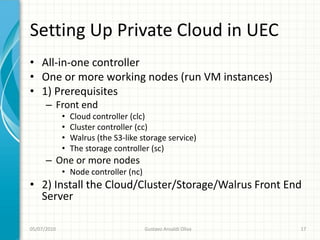
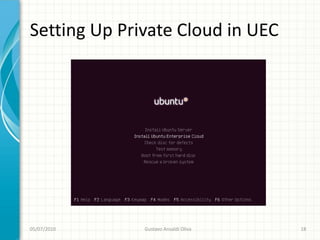
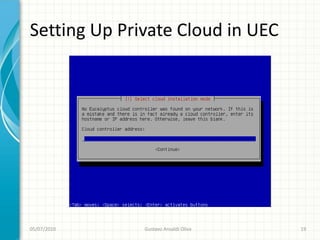
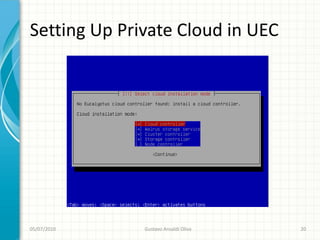
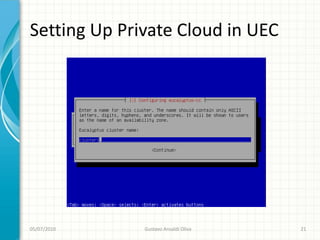
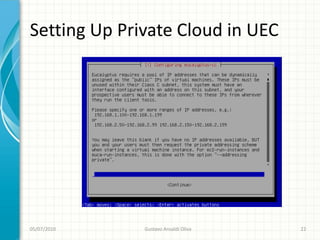
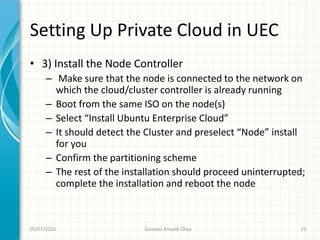
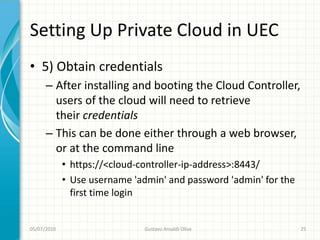
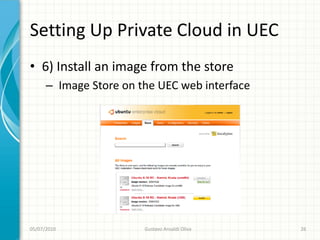
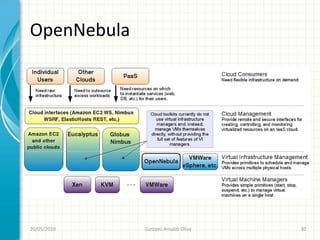
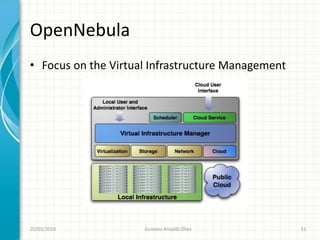
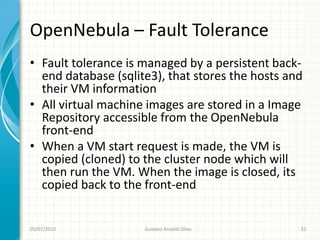
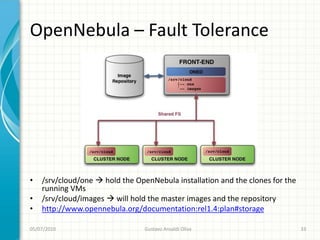
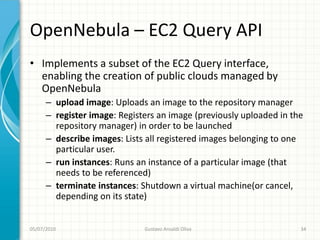
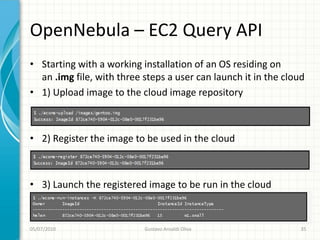
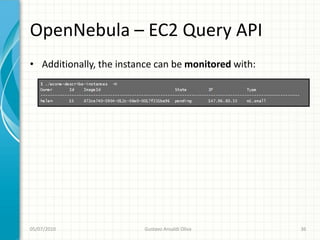
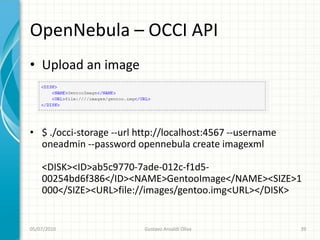
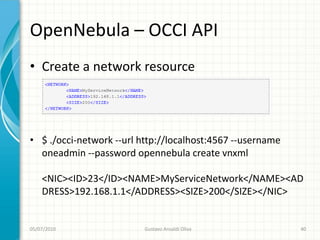
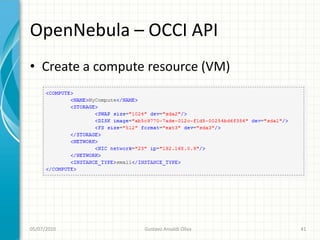
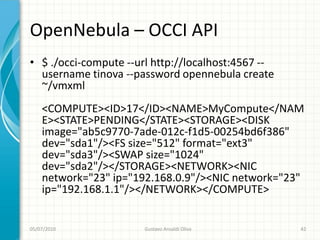
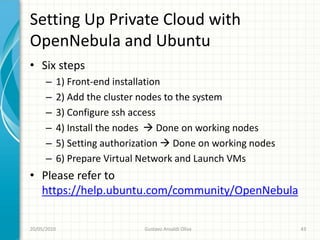
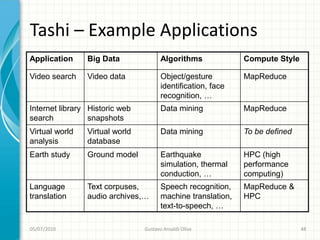
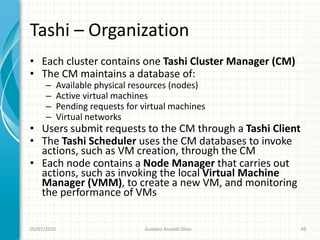
![Tashi – Native API
• Users invoke Tashi actions through a Tashi
client
• VM Life-cycle
– createVm [--userId <value>] --name <value>
[--cores <value>] [--memory <value>] --disks
<value> [--nics <value>] [--hints <value>]
– destroyVm --instance <value>
– shutdownVm --instance <value>
05/07/2010 Gustavo Ansaldi Oliva 50](https://image.slidesharecdn.com/curso4gradesgoldman-101011202742-phpapp01/85/Mini-curso-Grades-e-nuvens-244-320.jpg)