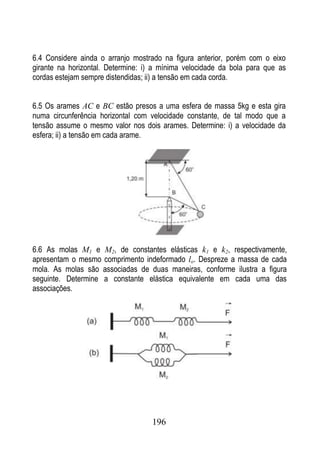
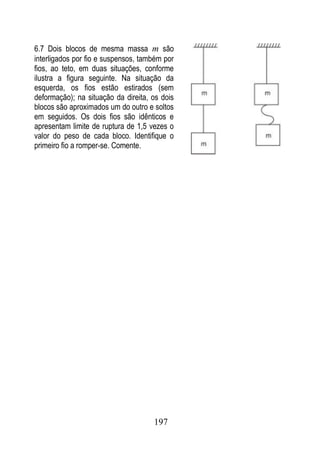
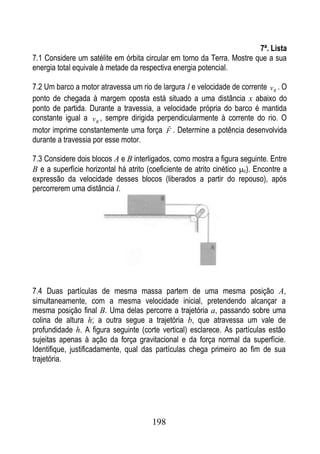
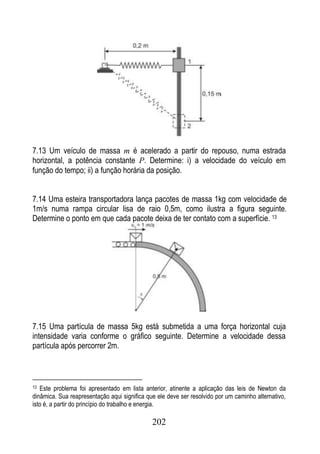
Este documento apresenta um roteiro de estudo introdutório sobre mecânica clássica. Ele destina-se principalmente a estudantes de física da Universidade Estadual do Ceará e fornece uma lista diversificada de exercícios para desenvolver habilidades analíticas. O autor convida reparos, críticas e sugestões para melhorar a proposta.















































































































































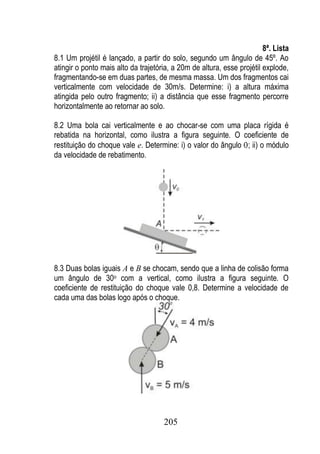
![3ª. Lista
3.1 Considere a partícula P da figura seguinte movendo-se numa trajetória definida
pelo seguinte vetor-posição:
r [ A. cos(a.t )].i [ B.sen (a.t )]. j .
Mostre que a aceleração é voltada para a origem e proporcional à distância da
partícula à origem.
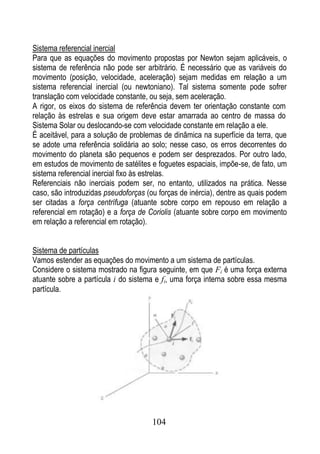
3.2 Uma partícula se movimenta com velocidade de módulo constante v o numa
trajetória descrita pela equação y a.sen(b.x) . Determine as componentes da
velocidade segundo as direções x e y , num instante qualquer.
3.3 Um tanque de pressão apresenta orifício em A, por onde a água escoa com
velocidade horizontal vo, conforme ilustra a figura seguinte. Determine a faixa de
valores de vo para que a água atravesse a abertura BC.
3.4 Mostre que o raio de curvatura da trajetória de um projétil é mínimo no ponto
mais alto dessa trajetória.
180](https://image.slidesharecdn.com/mecnicabsicai3a-edio-120806202626-phpapp02/85/Mecanica-basica-i-3a-edicao-180-320.jpg)








































![43640380 mecanica-vetorial[2]](https://cdn.slidesharecdn.com/ss_thumbnails/43640380-mecanica-vetorial2-130410152247-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




















