Baixado 75 vezes


























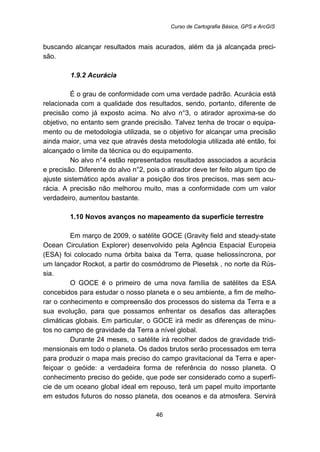














































































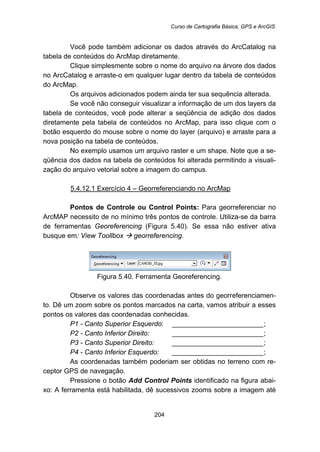















![5B6 BIBLIOGRAFIA
BAKKER, M.P.R., 1965. Noções Básicas de Cartografia. DH 21-1
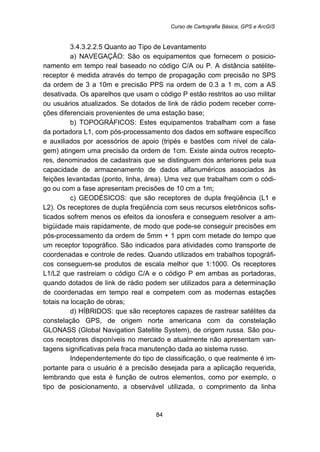
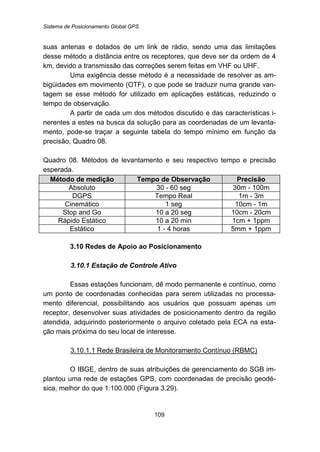
BRASIL, INCRA. Norma Técnica para Georreferenciamento de Imóveis
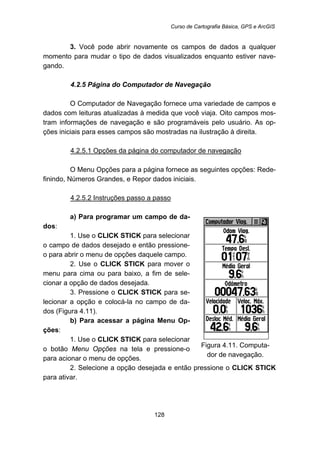
Rurais. Brasília: novembro de 2003, 1P
a
P edição.
BRASIL. Noções básicas de cartografia. Instituto Brasileiro de Geografia e
Estatística – IBGE, www.ibge.gov.br acesso em:
http://www.politecnico.ufsm.br/cursos/tecnicos/images/downloads/cartografia
.pdf
COIMBRA, P. et al, 1998. Geografia: Uma análise do espaço geográfico.
Ed. HARBRAS. 417 p.
DIAS, S. O., Curso de ArcMap 9. Porto Alegre, 2005.
DUARTE, P.A. Fundamentos de Cartografia. Florianópolis; Ed. da UFSC,
1994. 148p.
ENVI. Guia do Envi. <http://envi.com.br/guia/d/index.html>, acesso em
01/09/2005.
ESRI, Getting to know ArcView GIS Published by ESRI, 1999.
EUROPEAN COMMISSION. "GALILEO, A Satellite Navigation System
for the World", European Communities, 2002.
EUROPEAN COMMISSION. "The Galileo Project: GALILEO Design Con-
solidation". August 2003.
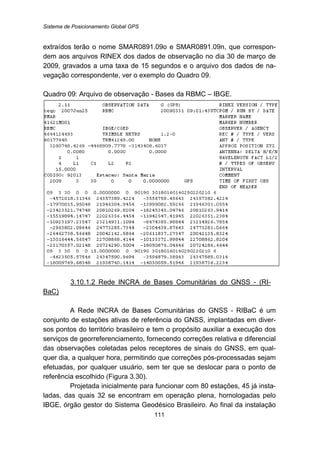
MONGUILHOTT, M., VIST, H. L., SOUZA, S. F, de, VALDAMERI, R. M.,
FERREIRA, A. H., Curso ArcView 9 : Básico [Manuscrito] 2 ed. 2006. 47
pg., il.
MONICO, J.F.G. Posicionamento pelo GNSS: Descrição, fundamentos e
aplicações. 2ª edição, São Paulo, Editora UNESP, 2008. 480p.
NIEVMSK, F. G., Curso de Introdução ao ArcView 8. Apostila, UFRGS –
Geodésia, Abril de 2004.
ROBAINA, A.D.; CATEN, A.T. Caderno Didático: Fundamentos do Sis-
tema de Posicionamento Global - GPS. Santa Maria, Colégio Politécnico
da UFSM, 2006. 72p.
ROSA, R. Cartografia Básica. Universidade Federal de Uberlândia. 2004](https://image.slidesharecdn.com/cursocartografiabasicagpsarcgis-150916205124-lva1-app6892/85/Curso-cartografia-basica_gps_arc_gis-227-320.jpg)
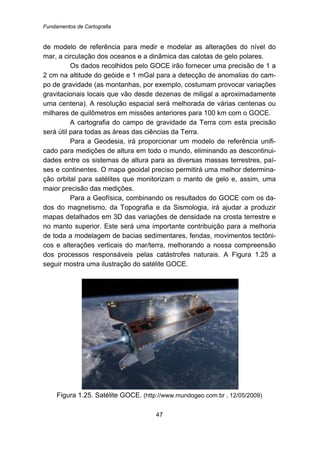
![Curso de Cartografia Básica, GPS e ArcGIS
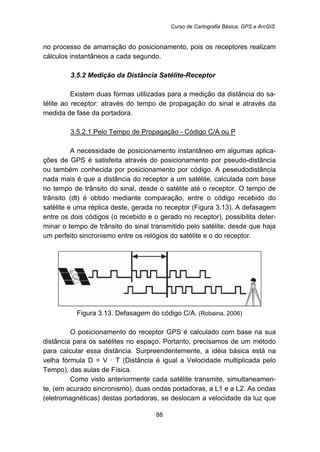
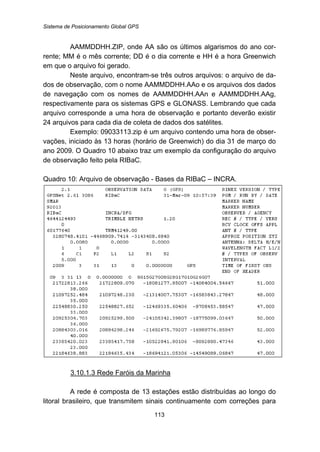
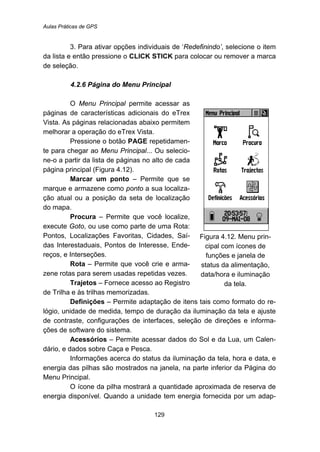
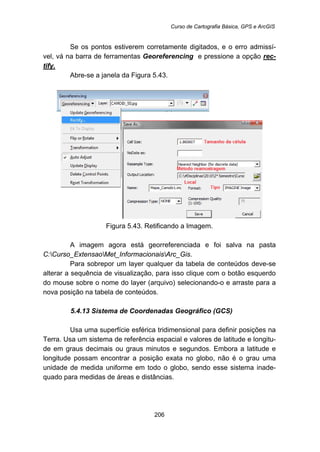
SEBEM, E.; LANGENDOLFF, A.; PELLEGRINI, G. C.; TEN CATEN, A.
(2008). Rede de referência cadastral como base para qualificar a geoin-
formação no Campus da UFSM. In: SIMPÓSIO BRASILEIRO DE
CIÊNCIAS GEODÉSICAS E TECNOLOGIAS DA INFORMAÇÃO, 2. Recife,
2008. Anais (CD ROM) Recife.
SEBEM, E., CATEN, A. t., ROBAINA, A. D., MOREIRA, A. L. L.,
PELLEGRINI, G. C. de, Fundamentos de Cartografia e o Sistema de
Posicionamento Global GPS. Santa Maria : UFSM/Colégio Politécnico da
UFSM e Departamento de Engenharia Rural, 2009. 205 p., il.
SEEBER, GÜNTER; Satellite geodesy : foundations, methods, and ap-
plications / Günter Seeber.-- Berlin [etc]: W. de Gruyter, 1993.-- XIII, 531 p.
: il., mapes.
SEGANTINE, P. C. L. GPS Sistema de Posicionamento Global – parte 2 -
Curso de Atualização em Topografia e GPS. São Carlos,
EESC/Transportes, 1996.
University of Arkansas Libraries, Tutorial.
<http://libinfo.uark.edu/gis/tutorial_sec1.asp>](https://image.slidesharecdn.com/cursocartografiabasicagpsarcgis-150916205124-lva1-app6892/85/Curso-cartografia-basica_gps_arc_gis-228-320.jpg)

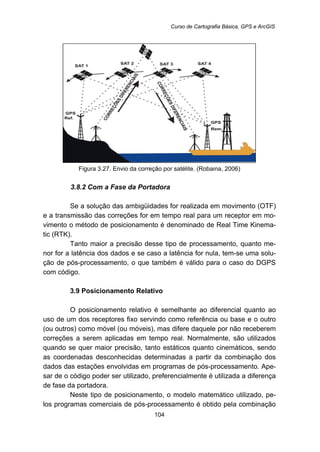
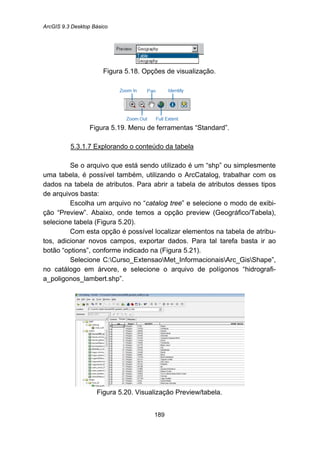
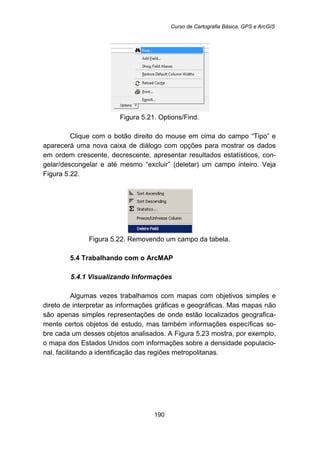
Este documento fornece instruções sobre um curso de cartografia básica, GPS e ArcGIS. O curso ensina sobre fundamentos de cartografia, incluindo sistemas de coordenadas e projeções cartográficas, e introduz a tecnologia GNSS e o sistema GPS. Também apresenta o software ArcGIS e como usá-lo para mapeamento e geoprocessamento.















































