Baixado 507 vezes











































![Catálogo Linha de Produtos, Poliron Cabos Elétricos Especiais Ltda, Diadema:
Poliron, [2002]
Catálogo Máster 2001, LR Informática Industrial, Porto Alegre: LR, 2001.
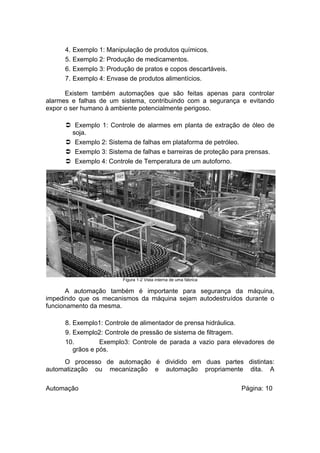
Catálogo Photoelectric Sensors, Banner Engineering Corporation, MinneapolisUSA, 2001.
Catálogo Sensores Abraf Sensor, Abraf Sensor Controles Eletrônicos Ltda, São
Paulo, [2000].
Controlador Programável MPC4004, Atos Automação Industrial Ltda, São Paulo:
Atos, 2001.
Fialho, Arivelto Bustamante, Instrumentação Industrial: Conceitos, Aplicações e
Análises, São Paulo: Érica, 2007
Gaidzinski, Vladimir Hartenias, Automação I, apostila curso: Tecnólogo em
Automação Industrial, SATC: Criciúma, 2001.
Georgini, Marcelo, Automação Aplicada, Descrição e Implementação de
Sistemas seqüenciais com PLCs, São Paulo: Érica, 2000.
Leite, Duílio Moreira, Esquemateca: Tecnologia do Controle e Automação
Industrial, São Paulo: MM Editora, 2000.
Lima, Walter Celso, Dispositivos Sensores de Erro, Florianópolis: Editora da UFSC,
1984.
Manuale dell’Operatore PLC Sysmac CQM1, Omrom, Itália: Omron, 1995.
Automação
136
Página:](https://image.slidesharecdn.com/clp-boa-131018112345-phpapp02/85/Clp-boa-136-320.jpg)
![Manual de Comandos de Pesagem para Modbus RTU/ASCII, Alfa Instrumentos,
Revisão 2.0, São Paulo: Alfa, 2002.
Manual de Instalação e Programação do Controlador Programável TP02, WEG
Automação, Jaraguá do Sul: Weg, 2001.
Manual de Instalação e Programação do Controlador Programável TPW03, WEG
Automação, Jaraguá do Sul: Weg, 2007.
Manual de Programação do Controlador BCM, BCM Automação, Porto Alegre:
BCM, [1997].
Manual de programação e operação FX2N, Mitshubshi, Japão: Mitshubshi, 1999.
Manual de Programação Hitachi, São Paulo: Hitachi ,1997.
Manual de Programação Máster Tool, Altus Sistemas de Automação, Porto Alegre:
Altus, 1998.
Manual Profibus-DP, Saia PCD – Process Control Devices, English edition 26-765
E1, SAIA-Burgess Electronics Ltd., Switzerland, 1999.
Micro-controlador Programável TP01-TP11, WEG Automação,Jaraguá do Sul:
Weg, 1997.
Mielle, Fabio, Softwares de Controle Evoluem e Ganham mesma Importância que
Hardware, Artigo Revista Controle & Instrumentação, pág. 90 e 91, São Paulo, Março
de 2003.
Norton, Peter, Introdução à informática, São Paulo: Makron Books, 1996.
Automação
137
Página:](https://image.slidesharecdn.com/clp-boa-131018112345-phpapp02/85/Clp-boa-137-320.jpg)
![Souza, Giovani Batista de, Controladores Lógicos, apostila curso: Tecnólogo em
Eletromecânica, SATC: Criciúma, 2008
SYSMAC CQM1H Series : Operation Manual, Japão: Omron, [2005].
Walisiewicz, Marek, Energia Alternativa: Solar, Eólica, Hidroelétrica e de
Biocombustíveis, São Paulo: Publifolha, 2008.
Automação
139
Página:](https://image.slidesharecdn.com/clp-boa-131018112345-phpapp02/85/Clp-boa-139-320.jpg)








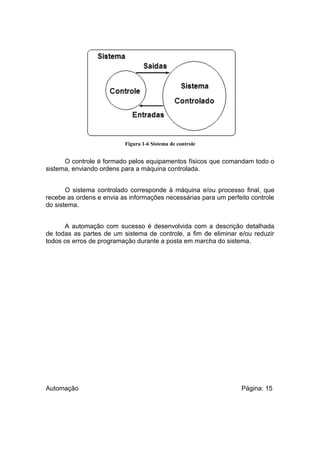
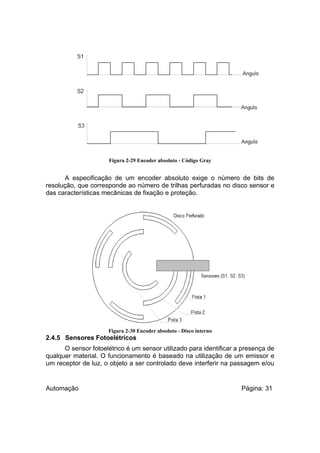
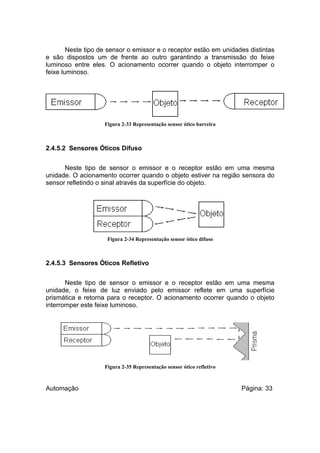
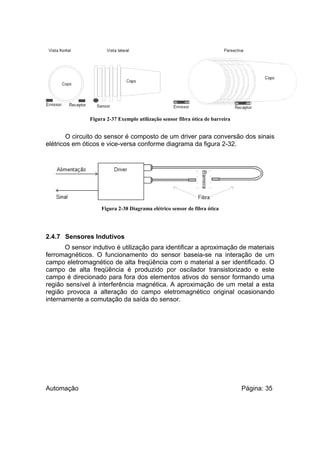
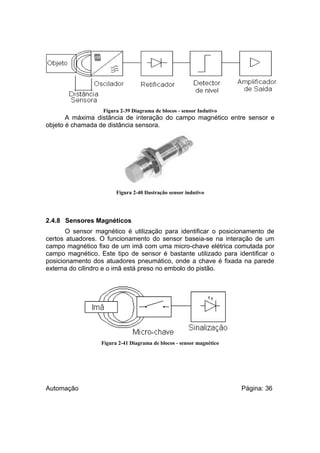
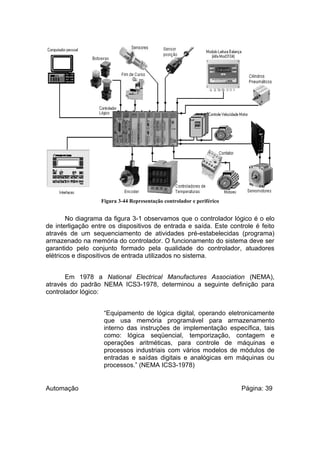
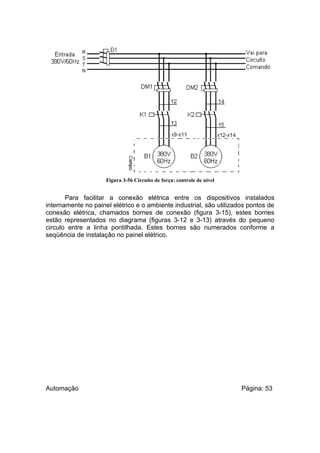
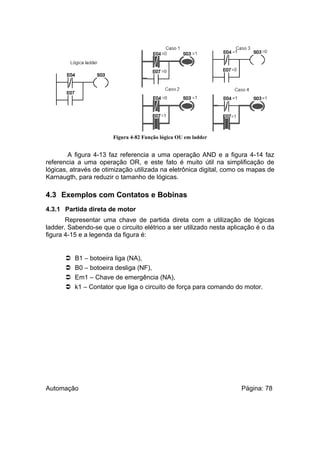
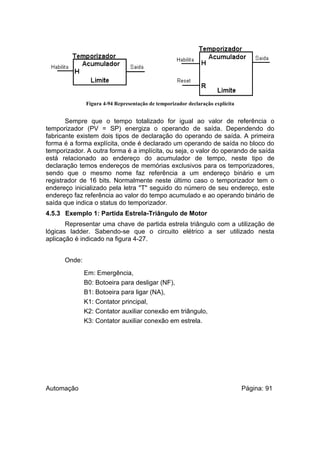
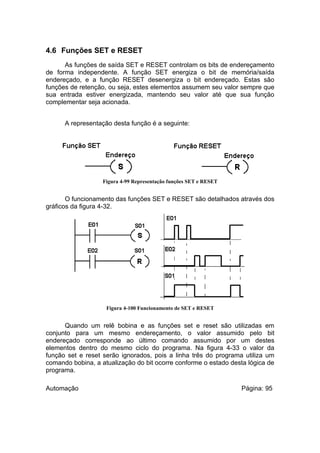
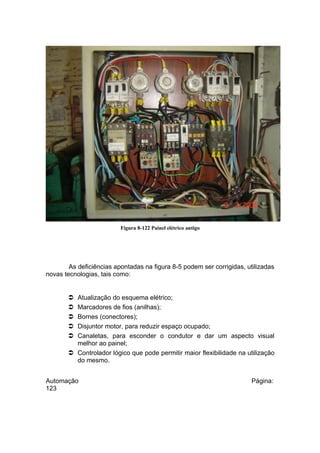
Este documento é uma apostila sobre automação industrial desenvolvida por Prof. Eng. Giovani Batista de Souza. A apostila contém informações sobre sistemas automáticos, sinais e sensores, controladores lógicos, programação em ladder e exemplos de aplicações. A apostila foi desenvolvida a partir de trabalhos anteriores do autor sobre automação com controladores lógicos.













































