Baixado 801 vezes

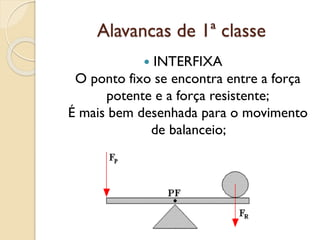
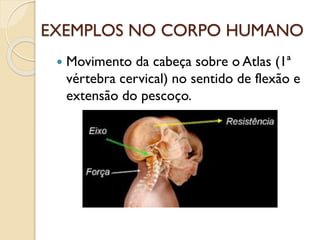
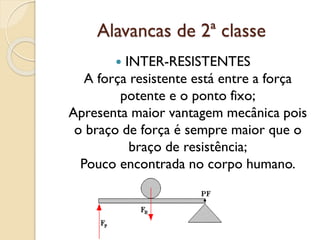
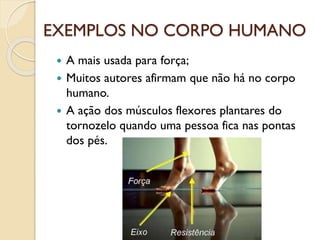
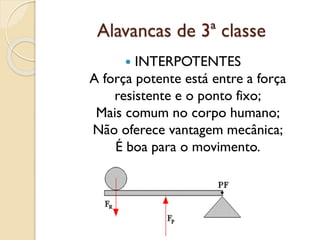
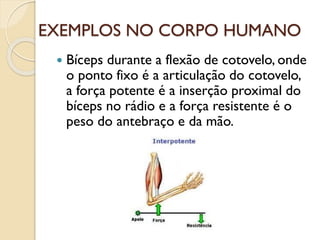

O documento descreve as três classes de alavancas - 1a, 2a e 3a - encontradas no corpo humano. A 1a classe tem o ponto fixo entre a força potente e resistente, a 2a classe tem a força resistente entre a potente e o ponto fixo, e a 3a classe tem a força potente entre a resistente e o ponto fixo. Exemplos como a flexão do pescoço e do cotovelo são dados para cada classe de alavanca.