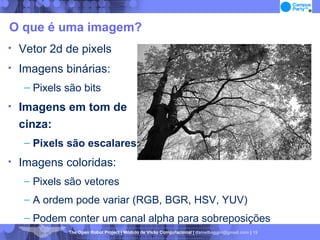
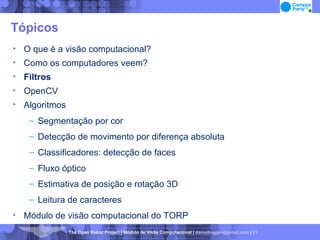
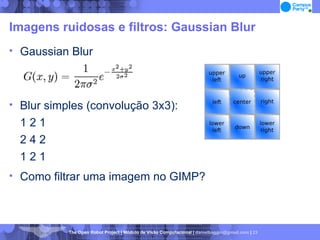
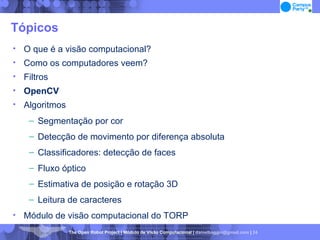
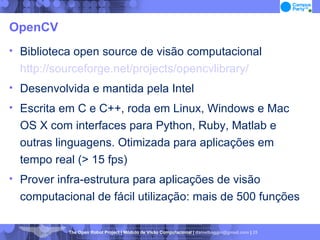
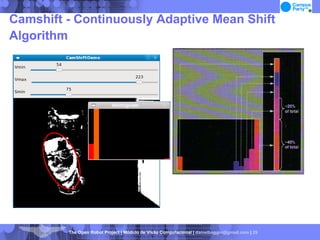
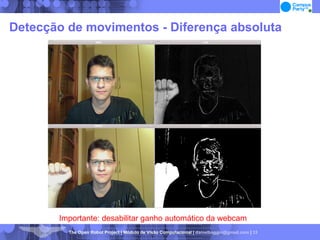
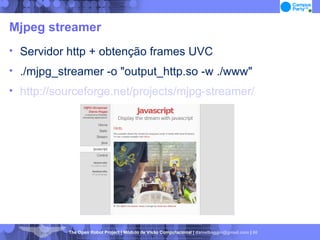
O documento discute visão computacional e fornece uma introdução aos principais tópicos, incluindo: (1) como os computadores processam imagens, (2) bibliotecas como OpenCV, (3) algoritmos como detecção de movimento, detecção facial e estimativa de posição 3D, e (4) aplicações como reconhecimento de objetos e caracteres.
![Daniel Lélis Baggio [email_address] TORP – The Open Robot Project Módulo de Visão Computacional](https://image.slidesharecdn.com/campusvision-1233000091340005-3/85/Campus-Party-Computer-Vision-1-320.jpg)
![Daniel Lélis Baggio [email_address] TORP – The Open Robot Project Módulo de Visão Computacional](https://image.slidesharecdn.com/campusvision-1233000091340005-3/75/Campus-Party-Computer-Vision-1-2048.jpg)

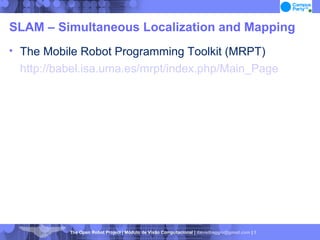






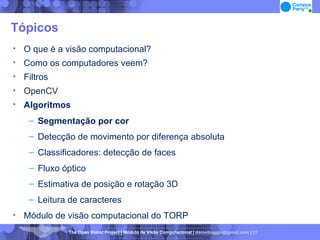
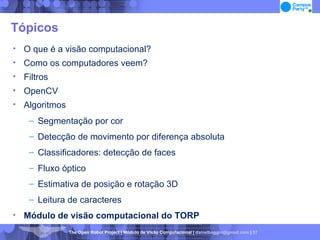
![Pré processamento Conversão para escala de cinza cvCvtColor( img, cinza, CV_BGR2GRAY ); RGB[A]->Gray: Y<-0.299*R + 0.587*G + 0.114*B Redimensionamento cvResize( cinza, imagem_reduzida, CV_INTER_LINEAR ); Normalização de brilho cvEqualizeHist( imagem_reduzida, imagem_reduzida ); 1. calcular histograma H para src. 2. normalizar histograma, de forma que a soma seja 255. 3. computar a integral do histograma: H’(i) = somatório0≤j≤iH(j) 4. transformar a imagem usando H’ como look-up table: dst(x,y)=H’(src(x,y))](https://image.slidesharecdn.com/campusvision-1233000091340005-3/85/Campus-Party-Computer-Vision-43-320.jpg)




![Dúvidas, sugestões e contribuições Daniel Lélis Baggio [email_address]](https://image.slidesharecdn.com/campusvision-1233000091340005-3/85/Campus-Party-Computer-Vision-65-320.jpg)





































