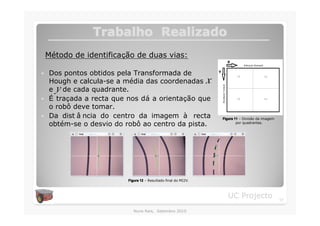
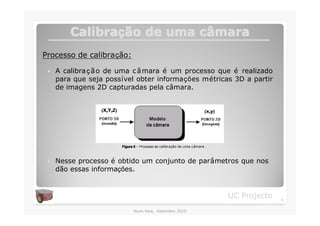
Este documento resume um projeto sobre condução autônoma de um robô usando visão computacional. O projeto envolveu a calibração de uma câmara, desenvolvimento de algoritmos para detecção de vias em imagens e controle do robô para navegação autônoma. Dois métodos foram desenvolvidos: um para identificar duas vias e outro para identificar uma via única. Ambos os métodos usaram processamento de imagem para segmentar as vias e guiar o movimento do robô. Testes demonstraram que o método de duas vias foi mais


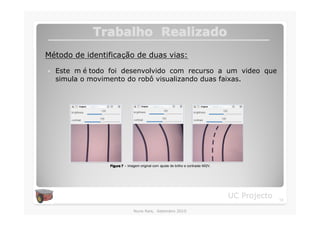
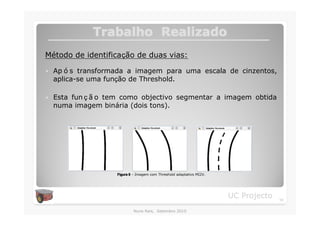
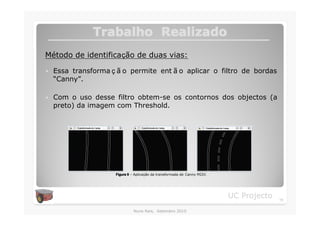
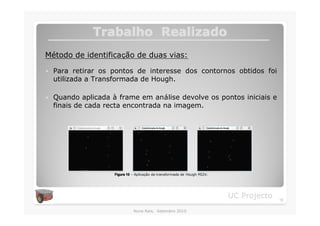
![Trabalho Realizado
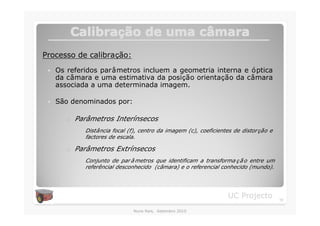
Método de calibração de Zhang:
� Usa-se um padr ã o (bidimensional) que é posicionado de
diversas formas no espaço dando origem a m imagens.
� Admite-se neste m é todo que os par â metros intr í nsecos da
câmara são os mesmos em todas as imagens.
Figura 6 – Imagens do “chessboard” [1].
UC Projecto 11
Nuno Reis, Setembro 2010](https://image.slidesharecdn.com/apresentaoprojecto-121221052417-phpapp01/85/Projecto-Conducao-Autonoma-11-320.jpg)