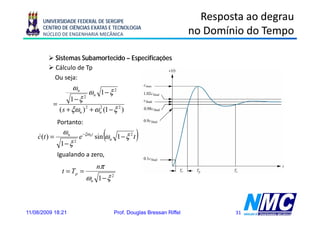
O documento aborda os fundamentos dos sistemas de controle, incluindo conceitos básicos de controle em malha aberta e fechada, e suas aplicações em diversas áreas como automação, robótica e máquinas elétricas. Além disso, discute a modelagem no domínio da frequência e no espaço de estados, detalhando a representação matricial de sistemas dinâmicos. O texto também menciona a importância dos sensores e atuadores para o aprimoramento da precisão nos processos de controle.


![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no Domínio da
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Freqüência
Objetivo: Função de Transferência
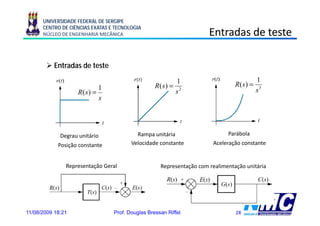
Entrada Saída
Sistema
Entrada Saída
Subsistema Subsistema Subsistema
Revisão sobre Transformada de Laplace
• A transformada de Laplace é definida como:
∞
L[ f (t )] = F ( s ) = ∫ f (t )e − st dt
0−
em que: s = σ + jω é uma variável complexa.
• O limite inferior da integral significa que, mesmo se f(t) for descontínua em
t=0, pode-se começar a integração antes da referida, desde que a integral
convirja.
j
11/08/2009 18:21 Prof. Douglas Bressan Riffel 18](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-18-320.jpg)
![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Domínio da Freqüência
• A transformada inversa de Laplace é dada por:
1 σ + j∞
2πj ∫σ − j∞
−1
L [ F ( s )] = f (t )u (t ) = F ( s )e st ds
onde u(t) = 1, p/ t > 0 ou u(t) = 0, p/ t < 0. (função degrau unitário)
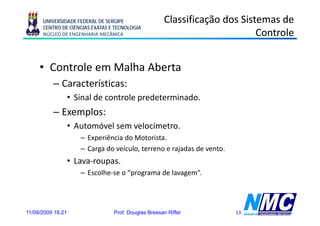
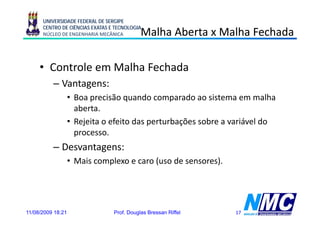
Algumas f õ representativas
Al funções t ti
f (t ) F (s ) f (t ) F (s )
δ (t ) 1
1 e − at u (t )
1 s+a
u (t ) ω
s sin ωtu (t )
s2 + ω 2
t n u (t ) n!
s
s n +1 cos ωtu (t )
s2 + ω 2
11/08/2009 18:21 Prof. Douglas Bressan Riffel 19](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-19-320.jpg)
![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Domínio do Tempo
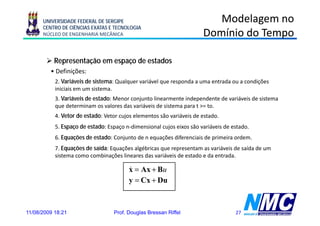
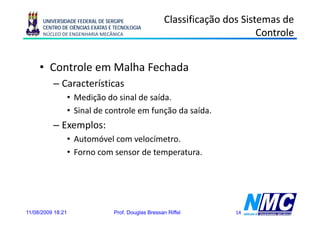
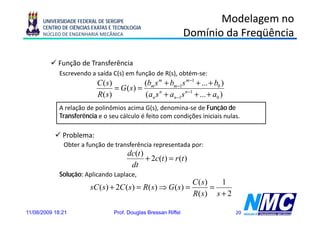
Objetivo: Representação em espaço de estados
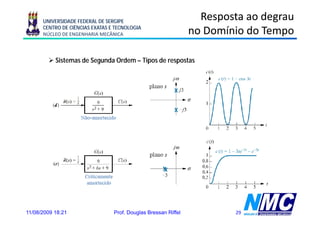
• Considere o circuito RL abaixo, com condições iniciais nulas:
Para a corrente i(t), pode-se escrever:
di
d
v(t ) = L + Ri
dt
Por Laplace,
V ( s ) = L[ sI ( s ) − i (0)] + RI ( s )
Se V(s) for um degrau unitário,
1 ⎛1 1 ⎞ i (0)
I (s) = ⎜ − ⎟ +
L⎝ s s+R/L⎠ s+R/L
Aplicando a transformada inversa de Laplace
Laplace,
i (t ) =
1
L
(1 − e−( R / L)t ) + i(0)e−( R / L)t onde i(t) é uma variável de estado.
11/08/2009 18:21 Prof. Douglas Bressan Riffel 21](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-21-320.jpg)
![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Domínio do Tempo
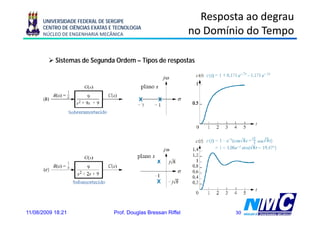
Objetivo: Representação em espaço de estados
A variável de estado i(t) é obtida a partir da equação de estado
di
L + Ri = v(t )
(
dt
A partir de i(t) e de v(t), pode-se obter outras variáveis de circuito:
vR (t ) = Ri (t ) tensão sobre o resistor.
vL (t ) = v(t ) − Ri (t ) tensão sobre o indutor.
di 1
= [v(t ) − Ri ] derivada da corrente.
dt L
Determinando-se a variável de estado i(t) e a entrada v(t), pode-se obter o
estado de qualquer variável de circuito para t >= to
to.
As equações acima são denominadas de equações de saída.
O sistema de equações que combina equações de estado e de saída compõe a
representação no espaço de estado do sistema
sistema.
11/08/2009 18:21 Prof. Douglas Bressan Riffel 22](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-22-320.jpg)
![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Domínio do Tempo
Objetivo: Representação em espaço de estados
Um exemplo de equação de saída é:
1
vL (t ) = − q (t ) − Ri (t ) + v(t )
C
• Observe que a equação de saída é uma combinação linear das variáveis de
estado.
Outras variáveis de estado podem também ser escritas, por exemplo:
dvR 1
= [− RvR − RvC + Rv(t )]
dt L
dvC 1
= vR
dt RC
As variáveis de estado devem ser linearmente independentes.
Do ponto de vista de aplicabilidade, as equações de estados devem ser
lineares.
11/08/2009 18:21 Prof. Douglas Bressan Riffel 25](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-25-320.jpg)
![UNIVERSIDADE FEDERAL DE SERGIPE Modelagem no
CENTRO DE CIÊNCIAS EXATAS E TECNOLOGIA
NÚCLEO DE ENGENHARIA MECÂNICA Domínio do Tempo
Objetivo: Representação em espaço de estados
As equações de estado podem ser representada matricialmente:
x = Ax + Bu
&
onde:
⎡dq / dt ⎤ ⎡ 0 1 ⎤ ⎡q ⎤ ⎡ 0 ⎤
& =⎢ A=⎢ ⎥ x = ⎢ i ⎥ B = ⎢1 / L ⎥ u = v(t )
di / dt ⎥
x
⎣ ⎦ ⎣− 1 / LC − R / L⎦ ⎣ ⎦ ⎣ ⎦
A equação de saída para y(t) = vL(t) é dada por
y = Cx + Du
onde:
C = [− 1 / C − R] D =1
• D fi i õ
Definições:
1. Combinação linear: Uma combinação linear de n variáveis é definida como:
S = k n xn + k n −1 xn −1 + ... + k1 x1
11/08/2009 18:21 Prof. Douglas Bressan Riffel 26](https://image.slidesharecdn.com/10-sistemasecontroleseletrnicos-090811163647-phpapp01/85/10-Sistemas-e-Controles-Eletronicos-26-320.jpg)