Baixado 49 vezes






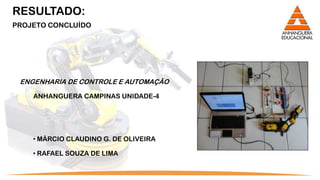

1. O projeto desenvolveu a automação de um braço robótico educacional através da implementação de microcontroladores e comunicação sem fio para remover o joystick de controle. 2. Uma interface gráfica no computador foi desenvolvida para fornecer comandos manuais e automatizados ao robô. 3. O projeto foi concluído e desenvolveu as engenharias de controle e automação do braço robótico.















































