Baixar para ler offline

![2
6XPiULR
, 2EMHWLYR
,, 5HVXPR GR 3URMHWR
,,, 0pWRGR GRV (OHPHQWRV )LQLWRV
A. Introdução..........................................................................................................4
B. Como é aplicado o Método dos Elementos Finitos...........................................4
C. Esquema Simplificado de um Programa de Elementos Finitos ........................5
D. Método Clássico para a Solução de Problemas de Valor de Contorno.............5
1. Método de Galerkin ............................................................................5
E. Função de Base para Elemento Finito 1D.........................................................7
,9 $QiOLVH 0RGDO GH *XLDV ÏSWLFRV 3ODQDUHV
9 $ERUGDJHP $QDOtWLFD SDUD (VWXGR GH *XLDV ÏSWLFRV 3ODQDUHV
A. Programa para cálculo analítico dos autovalores ( ¡ ¡
Q ) em guias ópticos
planares simétricos e isotrópicos.....................................................................11
9, $ERUGDJHP 1XPpULFD )RUPXODomR GR 0() SDUD (VWXGR GH *XLDV ÏSWLFRV
3ODQDUHV $QLVRWUySLFRV H 1mR+RPRJrQHRV
A. Exemplo de Aplicação.....................................................................................17
1. Caso de Estudo: Guia Planar Homogêneo, Isotrópico e Simétrico ..17
9,, $QiOLVH 1XPpULFD GH *XLDV ÏSWLFRV 3ODQDUHV $QLVRWUySLFRV H 1mR+RPRJrQHRV
A. Guia Planar Formado por Processo de Difusão (Ti:LiNbO3)..........................19
B. Caso de Estudo: Guia Óptico Planar Não-Homogêneo, Anisotrópico e
Não-Simétrico (guia tipo Ti:LiNbO3) ............................................................20
9,,, 3URJUDPD SDUD $QiOLVH 0RGDO GH *XLDV ÏSWLFRV 3ODQDUHV H 'HVFULomR GD
,QWHUIDFH *UiILFD SDUD (QWUDGD GH 'DGRV H 9LVXDOL]DomR *UiILFD GH 5HVXOWDGRV
A. Fluxograma do Programa GOP .......................................................................22
B. Descrição da Interface Gráfica do programa GOP..........................................23
1. Parâmetros de Entrada ......................................................................24
2. Opções para Visualização Gráfica de Resultados.............................26
3. Visualização de Resultados...............................................................28
4. Informações Sobre o Processo Difusivo...........................................34
5. Informações Sobre o Programa GOP................................................34
6. Informações Sobre o Projeto.............................................................35
,; 0LJUDomR H $GDSWDomR GH 3URJUDPD GH 0()' SDUD 6LVWHPD GH 3URFHVVDPHQWR
'LVWULEXtGR
A. Abordagem Primeira: Utilização do Programa Octave-MPI com Sistema
Operacional Linux...........................................................................................36
1. Requisitos para utilização do Octave-MPI .......................................36
2. Problemas encontrados para compilar o Octave-MPI ......................36
B. Abordagem Segunda: Utilização do Programa Matlab em Sistema de
Computação Distribuída Baseado em Sistemas Mistos (Windows e Linux)..36
1. Pesquisa sobre pacotes disponíveis para utilização do Matlab em
computação distribuída.....................................................................36
2. O Toolbox ParMatlab ......................................................................38
3. Adaptação do programa GOP-simplificado para sistema de
computação distribuída.....................................................................38
; 3HUVSHFWLYDV
;, RQFOXV}HV
;,, 5HIHUrQFLDV %LEOLRJUiILFDV](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-2-320.jpg)
![3
, 2EMHWLYR
Desenvolvimento, teste e validação de programas de aplicação do Método dos Elementos
Finitos (MEF) a problemas do eletromagnetismo. Tais desenvolvimentos e testes, visam a
utilização do sistema de processamento distribuído para computação de alto desempenho,
denominado projeto “BELIEVe”.
,, 5HVXPR GR 3URMHWR
O trabalho, em desenvolvimento, pretende estabelecer procedimentos para a paralelização de
programas de aplicação do Método dos Elementos Finitos desenvolvidos em ambiente
Matlab.
Numa primeira fase de desenvolvimento, serão realizados estudos sobre o Método dos
Elementos Finitos, em abordagem unidimensional para a análise modal de guias ópticos
planares
Na segunda etapa, os programas desenvolvidos serão adaptados para execução em pacotes de
processamento numérico que permitam execução em sistemas operacionais Windows e Linux.
A seguir, serão realizadas a migração, adaptação e teste dos programas para processamento
paralelo.
Após estas etapas, serão iniciados os estudos relacionados à aplicação do Método dos
Elementos Finitos a problemas bi-dimensionais (2D) de fibras ópticas. De forma análoga, os
programas serão escritos e testados em máquinas monoprocessadas e posteriormente em
processamento paralelo.
Das atividades decorrentes deste trabalho, podem ser destacados os seguintes passos gerais:
1. Desenvolvimento de programa para aplicação do Método dos Elementos Finitos 1D para a
análise modal de guias ópticos planares com anisotropia (versão mono-processada).
2. Desenvolvimento de programa para aplicação do Método dos Elementos Finitos 2D para a
análise modal de guias fibras ópticas (versão mono-processada).
3. Adaptação dos programas desenvolvidos, em etapas anteriores, ao sistema de computação
distribuída – BELIEVe.
4. Análise comparativa de desempenho entre sistema mono-processado e de computação
distribuída.
Os programas desenvolvidos para problemas unidimensionais de propagação de ondas ópticas
terão a capacidade de construir automaticamente a malha de elementos finitos com um
algoritmo de refinamento auto-adaptativo.
Para problemas bi-dimensionais, os programas de análise modal deverão permitir a leitura de
dados de definição de geometria, malha de elementos finitos e propriedades físicas dos
materiais, segundo o padrão adotado no sistema de software para guias ópticos integrados, em
desenvolvimento por uma das equipes de pesquisadores do LEV (Laboratório de Engenharia
Virtual do IEAv) com apoio FAPESP (Proc. 98/07789-7) [1]-[2]. A análise de resultados, tal
como a visualização da distribuição dos campos ópticos, será realizada com o auxílio do
referido sistema de software.](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-3-320.jpg)
![5
(VTXHPD 6LPSOLILFDGR GH XP 3URJUDPD GH (OHPHQWRV )LQLWRV
Modelo Geométrico (1D, 2D ou 3D)
Malha de elementos finitos
Propriedades Físicas e Condições de Contorno
Solução do Sistema de Equações
Exploração de Resultados
' 0pWRGR OiVVLFR SDUD D 6ROXomR GH 3UREOHPDV GH 9DORU GH
RQWRUQR
A seguir, revisaremos os aspectos gerais de um dos métodos clássicos para a solução de
problemas de valor de contorno o método de Galerkin que juntamente com o método de Ritz
contém a base do método dos elementos finitos [3].
Problemas de valor de contorno são muito empregados no modelamento de sistemas físicos.
Tipicamente pode ser definido por uma equação diferencial em um domínio Ω:
/φ I
Juntamente com as condições de contorno sobre a fronteira Γ que delimita o domínio. / é um
operador diferencial, I é a excitação e φ é a variável desconhecida.
A solução analítica dos problemas de valores de contorno limita-se a poucos casos especiais,
propagação de ondas em guias retangulares, circulares e elípticos, cavidades circulares e
esféricas e espalhamento de ondas por placas infinitas, cilindros e esferas. Muitos outros
problemas de interesse prático não têm solução analítica e os métodos de Ritz e Galerkin têm
sido largamente utilizados para superar essas dificuldades.
0pWRGR GH *DOHUNLQ
O método de Galerkin pertence à família dos métodos de resíduos ponderados, o qual como o
nome indica, aproxima a solução pela ponderação do resíduo da equação diferencial.
Considere a equação diferencial /φ I . Assuma que φ
~
é uma solução aproximada. A
substituição de φ por φ
~
na equação diferencial resulta um resíduo não nulo,
0
~
≠−= I/ φU .
A melhor aproximação para φ
~
será aquela que minimizar o valor de U em todos os pontos de
Ω. O método dos resíduos ponderados força esta condição](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-5-320.jpg)
![6
0=Ω=
∫Ω
GU5 ω ,
onde 5¡ representa a integral do resíduo ponderado e ¢ω é a função de ponderação escolhida.
No método de Galerkin, a função peso é selecionada como sendo ser a mesma que a utilizada
na expansão da solução aproximada (φ
~
). Isto usualmente resulta uma solução mais acurada e
por isso esta técnica é tão popular.
Para ilustrar o método vamos assumir que a solução é representada pela expansão:
{}{} {}{}∑=
===
£
¤
¥¥
¤¤
FYYFYF
1
~
φ .
As funções peso são então selecionadas como ¦¦ Y=ω (i = 1, 2, 3, ..., N).
Desta forma, a integral dos resíduos será escrita como:
{}{}( ) 0=Ω−=
∫Ω
GYFYY5 §
¨
§§ I/ (i = 1, 2, 3, ..., N).
Isto leva ao sistema de equações [6] {F}T
= {E}T
, para o qual a matriz [6] não é
necessariamente simétrica a menos que o operador / seja auto-adjunto. Neste caso, o método
de Galerkin resulta no mesmo sistema de equações que resultaria da aplicação do método de
Ritz.
O método dos resíduos ponderados, associado com a escolha das funções peso descrita por
Galerkin, é equivalente ao método variacional de Ritz quando a primeira variação do
funcional é zero. Isto ocorre quando o operador / (ou a matriz resultante [6]) é positivo-
definida. Infelizmente, no eletromagnetismo, muitos problemas de interesse são descritos por
operadores não positivo-definidos. Neste caso, o método de Ritz falha em assegurar a
minimização do funcional, já que um ponto estacionário global pode não existir. Contudo a
aplicação do método de Galerkin fornece um sistema discreto e não requer um operador
positivo-definido ou simétrico. A solução é simplesmente um ponto estacionário e não
necessariamente um mínimo.
Para a solução do sistema de equações deve-se impor as condições de contorno. Dois tipos de
condição de contorno são rotineiramente encontradas: a condição de contorno de Dirichlet,
que deve ser explicitamente imposta, e a condição de contorno homogênea de Neumann
( 0ˆ =∂∂ Qφ , derivada normal de φ igual a zero), que é implicitamente satisfeita e conhecida
como condição de contorno natural (não precisa ser explicitamente imposta).
Na técnica de Galerkin, tanto a função de aproximação quanto a função peso são expandidas
utilizando-se as mesmas funções polinomiais. Essas funções recebem o nome de funções de
base ou de forma (1).
No 0pWRGR GRV (OHPHQWRV )LQLWRV 0()](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-6-320.jpg)



![9
é paralelo ao eixo [, os modos são designados
§¨
( . Os subscritos P e Q representam o
número de máximos na amplitude de campo nas direções [ e , respectivamente.
Os modos (
¡
podem ser bem representados pela aproximação de modos quase-TE, para os
quais o componente de campo (¢ = 0. Neste caso, soluções para a equação de onda podem ser
obtidas para o componente (¡
de campo elétrico. Por outro lado, os modos (
y
podem ser bem
representados pela aproximação de modos quase-TM, com o componente de campo +¢ 0.
Neste caso, as soluções para a equação de onda podem ser encontradas para o componente +¡
de campo magnético.
Guias ópticos planares formados por processos de difusão de metal em substratos como o
LiNbO3 e LiTaO3 são de grande interesse para a construção de moduladores eletroópticos,
chaves, etc. A solução rigorosa é limitada a perfis especiais de distribuição de índices de
refração. O MEF pode solucionar este problema considerando a anisotropia e uma não-
homogeneidade arbitrária do tensor de permissividade elétrica [ε].
Vamos a seguir apresentar a formulação matemática do MEF para guias ópticos planares
anisotrópicos e difusos em meios materiais com tensor permissividade diagonal e sem perdas.
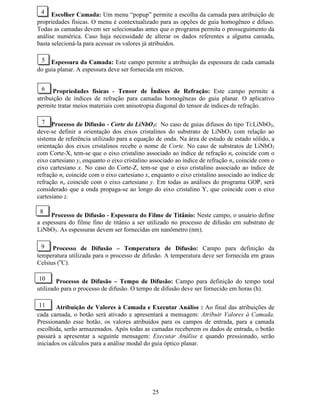
Fig. 1. Guia óptico planar com três camadas dielétricas.
Consideremos um guia de onda óptico planar simétrico de três camadas (Fig. 1) com
propagação do feixe óptico na direção ]. Assumiremos que a estrutura do guia de onda é
homogênea na direção de propagação e que a relação entre índices de refração são: £Q , ¤Q e
¥
Q é ¦
§¨
QQQ ≤ . Se uma onda plana incide na interface superior ou inferior do guia com um
ângulo θ, a constante de fase β, na direção da propagação, será:
θβ VLQQN ©
0=
onde: θ
β
VLQQ
N
Q
=≡
0
é chamado de índice efetivo ou constante de propagação normalizada. Se os ângulos críticos
nas interfaces, W −= e 0 = ,são respectivamente,
então
θθ ≤ , baseada na suposição de que
QQQ ≤ . Entretanto, quando θθ
, a
reflexão total ocorre em ambas as interfaces, resultando na luz sendo transmitida enquanto
∞
∞
Substratoo
Guia Planar Difuso
Cobertura[
-]
= −
Q
Q
VLQ
1
θ
= −
!
Q
Q
VLQ
1
θ
Índices de Refração:
Cobertura → Q#
Guia → Q$
Substrato → Q%](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-10-320.jpg)
![10
presa no filme fino. Este modo é chamado de modo guiado e
¡
¢
QQQ ≤≤ . Por outro lado,
quando θ é menor que £θ , e ¤
¥
θθθ , a condição para reflexão total não é obedecida na
interface inferior e parte da luz é irradiada para dentro do substrato. Este modo é chamado de
modo de radiação do substrato, neste caso, ¦
§ ¨ ¨©
QQQ ≤≤ . Quando θ torna-se menor e
θθ , a condição de reflexão total não é obedecida por ambas as interfaces superior e
inferior e a luz é irradiada em ambos os lados. Este modo é chamado de modo de radiação do
substrato e cobertura e, neste caso,
QQ ≤ .
9 $ERUGDJHP $QDOtWLFD SDUD (VWXGR GH *XLDV ÏSWLFRV 3ODQDUHV
Para oscilações harmônicas propagando-se em meios materiais dielétricos, isotrópicos e livres
de fontes internas, as equações de Maxwell podem-ser escritas como [3]:
+M( µω−=×∇
(M+ εω+=×∇
0=⋅∇ +
( ) 0=⋅∇ (ε
com ( )
H++
βω −
= , ( )
!!
H((
βω −
= , L = [, , ],
β = constante de propagação e
ω = freqüência angular.
Lembrando que para guias planares não há variação dos campos na direção transversal [
( 0=∂∂ [ ), as equações que envolvem o rotacional dos campos elétrico e magnético podem
ser reescritas como:
#
+M](
0µω−=∂∂
$
%
+M(
0µω=∂∂
'
((
'
(QM+(
2
0εω=∂∂−∂∂
)
0
1
(QM+
2
0εω=∂∂
2
34
(QM+
2
0εω−=∂∂
56
7
+M]((
0µω−=∂∂−∂∂
As equações relacionadas com o termo (×∇ não possuem o componente de
campo 8( (campo elétrico longitudinal), enquanto as equações provenientes de +×∇ não
possuem o componente de campo magnético 9+ (campo magnético longitudinal). Por isso, os
possíveis modos de propagação recebem a denominação de onda transversal elétrica (modo
TE ou modo Ex
) e onda transversal magnética (modo TM ou modo Ey
).
Definindo 1@ A B
P P P= = = para o modo TE, e 21C
C
P Q= , 21D
D
P Q= , 21E
E
P Q= para o
modo TM, a mudança de fase devido à reflexão total será expressa por
( )FF
GGG
NPP αφ 1
tan22 −
=
na interface entre o filme fino e substrato, e
( )FF
HHH
NPP αφ 1
tan22 −
=](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-11-320.jpg)
![11
na interface entre o filme fino e a camada de cobertura superior [3]. Nestas equações,
N corresponde à constante de fase na direção e αs e αc correspondem às constantes de
atenuação e podem ser expressas por :
22 ¡ ¢ ¢¢¢
QQN −= , 22 £¡ ¢ ¢£
QQ −=α , 22 ¤¡ ¢ ¢¤
QQ −=α .
A condição para a existência de um modo guiado é que o desvio de fase total na direção
durante um ciclo, deve ser igual a um múltiplo inteiro de 2 π. Portanto, esta condição pode ser
expressa como segue:
πφφ TWN ¥
¦
§
2222 =−−
onde ,...2,1,0=T , define o modo óptico para o cálculo do autovalor. Por exemplo, T = 0
corresponde ao modo fundamental, enquanto T = 1 e T = 2 correspondem ao segundo e
terceiro modos guiados, respectivamente.
Substituindo as equações para o desvio de fase devido à reflexão (2φs e 2φc) na equação acima
se obtém a seguinte equação de autovalores [3]:
π
αα
T
NP
P
NP
P
WN
¢¢
¤¤
¢¢
££
¢
++= −− 11
tantan
A constante de fase normalizada ( 0NQ¨ © © β= ) de um modo guiado, em uma dada freqüência
angular ω, pode ser calculada a partir da solução da equação transcendental de autovalor
acima.
$ 3URJUDPD SDUD FiOFXOR DQDOtWLFR GRV DXWRYDORUHV Q](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-12-320.jpg)
![HP JXLDV
ySWLFRV SODQDUHV VLPpWULFRV H LVRWUySLFRV
O programa apresentado a seguir, foi escrito para o pacote de processamento simbólico
Mathematica.
(* Determinação da constante de propagação de Guias Ópticos Planares Homogêneos e Isotrópicos *)
lambda = Input[”Entre com o comprimento de onda (em microns)” ]; (* Comprimento de Onda em Microns *)
t=Input[”Entre com a espessura do filme (guia) em microns: “]; t = t 0.000001; (* passar para metros *)
tipo = Input[”Modo Ex ou Ey? (x ou y):”]
(* MODO = 0 = Modo Fundamental
= 1 = Segundo Modo
= 2 = Terceiro Modo *)
MODO = Input[”Qual o modo? (0, 1, 2, ...): “]
k0 = N[2 Pi / (lambda 0.000001),10];
neff =.
if [tipo==”x”,
(* MODO Ex *)
nc = 1; nf = 2; ns = 1;
mf = 1; ms = 1; mc = 1,
else,
(* MODO Ey *)
nc = 1; nf = 2; ns = 1;
mf = 1 / nf^2; ms = 1 / ns^2; mc = 1 / nc^2;
];](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-13-320.jpg)
![12
kf = Sqrt[k0^2 nf^2 - neff^2 k0^2];
as = Sqrt[neff^2 k0^2 - k0^2 ns^2 ];
ac = Sqrt[neff^2 k0^2 - k0^2 nc^2 ];
var = ArcTan[(ms as) / (mf kf)] + ArcTan[ (mc ac) / ( mf kf )] + MODO N[Pi];
FindRoot[{ var == kf t },{neff,1.97}, WorkingPrecision - 20 ]
Plot[ ArcTan[(ms as) / (mf kf)] + ArcTan[ (mc ac) / ( mf kf )] + MODO N[Pi] - kf t ,{neff,1.6,2.1}];
9, $ERUGDJHP 1XPpULFD )RUPXODomR GR 0() SDUD (VWXGR GH
*XLDV ÏSWLFRV 3ODQDUHV $QLVRWUySLFRV H 1mR+RPRJrQHRV
A seguir, será apresentada a formulação matemática do MEF escalar para o estudo modal de
guias ópticos planares, anisotrópicos, simétricos ou não e não-homogêneos [4]-[7].
Como caso particular, serão considerados meios materiais para os quais a permissividade
elétrica pode ser representada como:
[ ] [ ]
( )
( )
( )
==
Q
Q
Q
¡
¢
£
2
2
2
0
00
00
00
1
εε
ε
Consideremos uma onda propagando-se harmonicamente na direção longitudinal ]. Neste
caso, as equações de Maxwell podem ser escritas como:
Substituindo as expressões para os campos elétrico e magnético nas equações de Maxwell e
suprimindo o fator ( )¤
¥
¦
H
βω −
, tem-se:
( ) 0.
0.
=∇
=∇
+=×∇
−=×∇
(
+
(M+
+M(
ε
εω
µω
Com
( )
( )§
¨
©
§
¨
©
H
H
((
++
βω
βω
−
−
=
=
β = constante de propagação
ω = freqüência angular
(QM
+
[
+
(QM+M
[
+
(QM+M
+
2
0
2
0
2
0
εω
εωβ
εωβ
−=
∂
∂
−
∂
∂
−=+
∂
∂
+=+
∂
∂
q
r
s
( ) ( ) 02
22
=−
∂
∂
+
∂
∂
=
∂
∂
−
∂
∂
(QM
(Q
[
(Q
+M
+
[
+
β
β
t
u
+M
(
[
(
+M(M
[
(
+M(M
(
0
0
0
µω
µωβ
µωβ
−=
∂
∂
−
∂
∂
=+
∂
∂
−=+
∂
∂
n
o
p](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-14-320.jpg)



![14
0
0
11
0
00
2222
02
0
2
2
0
02
0
2
0
=+−
∂
∂
∂
∂
=+−
∂
∂
∂
∂
=+−
∂
∂
∂
∂
−− ¡
¢
¡
¢
¡
¢
++Q
+
Q
+M
Q
+
+
Q
+M
Q
+
M
+
Q
M
µεωβ
µω
εω
β
εω
µω
εω
β
β
εω
02
0
222
=+−
∂
∂
∂
∂ −− ££¤
£
¥ +N+Q
+
Q
β (TXDomR GH RQGD SDUD 0RGR (
¦
Escrevendo as equações de onda de forma compacta, tem-se:
Aplicando o Método dos Resíduos Ponderados [5]:
φ é a função teste
As condições de contorno são:
( ) .0.
ˆˆ
21
0
0
2
0
2
∫∫
∫
=−+
∂
∂
−
∂
∂
+
+
+−
∂
∂
∂
∂
§©¨ ¨ !$#%('('
)
G6:G6
QQ
:
GN%
$
:
φφ
φφ
φφβ
φ
Onde ::: e, são funções peso inicialmente arbitrárias.
2
1
1
0
0
Q
%
$
(
=
=
=
=⇒ φ
1
(PRGR
1
2
2
=
=
=
=⇒
−
−
Q%
Q$
+
2
3
4φ
5
(PRGR
02
0
2
=+−
∂
∂
∂
∂
φφβ
φ
N%
$
)(0
ˆ
)(0ˆ
1
2
6HPRJrQHDKRP1HXPDQQ
Q
6HPRJrQHDKRP'LULFKOHWQ
=
∂
∂
=×
φ
φ](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-18-320.jpg)

![16
Assumindo 0=: sobre a superfície de Dirichlet 62 resulta:
∫∫∫ =−+
∂
∂
∂
∂
−=
¡
G:%G:NG
:
$5 .022
0 φβφ
φ
Esta equação fornece a base para a solução da equação de Helmholtz não homogênea pelo
método dos resíduos ponderados, em termos de uma função teste φ construída para cada
elemento individual [5].
Existem muitas maneiras de se selecionar as funções :. A mais comum, no método dos
elementos finitos, é utilizar para : o mesmo conjunto de funções de base { }1 utilizadas na
interpolação da função teste φ no interior de cada elemento finito. Esta escolha para as
funções peso no método dos resíduos ponderados, e suas conseqüências, é denominada
método de Galerkin.
Assumimos agora a seguinte aproximação:
{ }{ } { }{ }∑∑ ==
====
00
11
¢
£
¤
££
¢
£
¤
££
Z1Z1:11 φφφ
Vamos considerar que os parâmetros $, % e são constantes no interior de cada elemento
finito.
{ } { } { } { } { }{ }
{ } { }{ } 02
2
0
=−
−+
∂
∂
∂
∂
−
∫
∫∫
¥
¦¦
¥
¦¦
¥
¦
¦
G11%
G11NG
1
1
$
φβ
φφ
mas: 2
0
22
02
0
2
2
NQN
N
§ ¨ ¨
=
= ββ
Escrevendo na forma matricial obtém-se:
[ ]{ } [ ]{ }
©
©
0Q) φφ 2
=
com [ ] [ ] [ ]21 ))) −=
[ ] { } { }
∫=
G11N)
2
01
.02
0
2
=+−
−
∂
∂
∂
∂
+
∂
∂
∂
∂
−
∂
∂
∂
∂
∫∫
∫∫
G:NG:%
G
$
:
:
$G
$
:
φφβ
φφφ](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-20-320.jpg)
![17
[ ] { } { }
∫ ∂
∂
∂
∂
=
¡
G
1
1
$)
2
[ ] { } { }
∫=
¢
£
G11%N0
2
0
Para elementos finitos do tipo Lagrange de primeira ordem de aproximação polinomial, tem-
se:
3ULPHLUD RUGHP
[ ]
[ ]
[ ]
=
−
−
=
=
21
12
6
11
11
21
12
6
2
0
2
2
0
1
%/N
0
/
$
)
/N
)
$ ([HPSOR GH $SOLFDomR
Com a finalidade de validar as implementações do MEF para o estudo de guias ópticos
planares, foram realizados vários cálculos comparando os resultados obtidos com o MEF e
com a abordagem analítica descrita na secção (V). A solução analítica fornece valores exatos
para a constante de propagação normalizada de guias ópticos planares isotrópicos e
simétricos, ou seja, guias onde a camada de cobertura e de substrato têm a mesma espessura e
índices de refração.
DVR GH (VWXGR *XLD 3ODQDU +RPRJrQHR ,VRWUySLFR H
6LPpWULFR
A seguir, são apresentados os resultados para as simulações do guia óptico planar. Na análise
dos resultados foram utilizados parâmetros normalizados para a constante de propagação (%) e
para a freqüência de operação (ν), por apresentarem maior sensibilidade às mudanças
geométricas da estrutura do guia e às diferenças de índices de refração.
22
22
220
,
h
¤¥
¤¦ § §
¤¥
QQ
QQ
%QQ
N
−
−
=−=
π
ν ,
1 2
1
Numeração local](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-21-320.jpg)


![Guias ópticos formados por difusão de íons de Ti em substratos de LiNbO3 são muito
utilizados em circuitos de óptica integrada. Os parâmetros de difusão determinam os modos
ópticos suportados pela estrutura e o grau de confinamento. Na definição dos guias ópticos
planares, os seguintes parâmetros de fabricação foram considerados: a espessura inicial do
filme de Ti (H), a temperatura de difusão (T) e o tempo de difusão (t).
Para guias planares do tipo Ti:LiNbO3, os índices de refração na região de difusão são dados
por:
( ) ( )[ ]
−−∆++= 2
y
2
2
b
2
sb
2
b
2
oe,
d
y
expnnnn,yn oe,oe,oe,oe,
λ ,
onde: H R denotam os eixos extraordinário e ordinário respectivamente, é a coordenada de
um ponto no substrato, G¡ é a profundidade de difusão, Q¢ é o índice de refração do substrato
e ∆Q£ é a variação do índice de refração superficial com o comprimento de onda (λ). ¤
¥¦
§Q∆ é
fornecido em função de H e de alguns parâmetros de ajuste:
( ) ( ) ( )
oe,
oe,oe,
oe,
yy
10s
d
H
d
H
BBn
α
λλλ
+=∆ ,
,53.0,83.0 == ¨© αα ( ) 6.16.0 ≤≤ Pµλ ,
( ) ,171.0430.0385.0 2
0 λλλ +−=%
( ) ,490.2850.3130.9 2
1 λλλ −+=%
( ) ,0071.00315.00653.0 2
0 λλλ +−=%
( ) 2
1 3480.04640.04780.0 λλλ −+=% .
! # $% % % ! #% $%'
( )1032 4657085@9 5BA 9 C6D6E6FG)6C746CIHPCQ08C708F@R3S82 C
!
$
#
!
$
T UV
WXY V
X`
a `
bcU
bYd
Ye
fU V
U
cg
Y
hi p
Y
a Y q
r
Modo E
y
st ust vst wst xst y%vt u%vt v%vt wvt x%vt y%€t u
‚1ƒ3„ …6†7ƒ8†@‡ †Bˆ ‡ ‰66‘6’G‚6‰7…6‰I“P‰Qƒ8‰7ƒ8’@”3•8„ ‰
ut u
ut w
ut y
st v
st x
vt u
vt w
vt y
– —˜
™de ˜
df
g f
hi—
hej
ek
l— ˜
—
i
me
no p
e
g e q
r
Modo E
x
4a 4b](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-24-320.jpg)

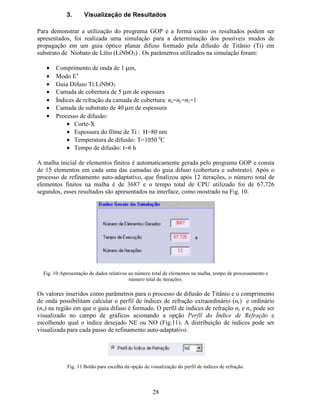
![21
Fig. 5 Valores para o índice efetivo (Q ¡ ¡ ), dos três primeiros modos guiados, em função de parâmetros do
processo de difusão do filme de Ti em substratos de LiNbO3. Fig. 5a Apresenta os valores de Q ¡ ¡ em função do
tempo de difusão e a Fig. 5b apresenta valores de Q ¡ ¡ em função da temperatura de difusão.
9,,, 3URJUDPD SDUD $QiOLVH 0RGDO GH *XLDV ÏSWLFRV 3ODQDUHV H
'HVFULomR GD ,QWHUIDFH *UiILFD SDUD (QWUDGD GH 'DGRV H
9LVXDOL]DomR *UiILFD GH 5HVXOWDGRV
Como parte deste trabalho, foi projetado e implementado um programa para a análise modal
de guias ópticos planares de três camadas dielétricas, que permite levar em consideração
anisotropias diagonais do tensor permissividade elétrica e não-homogeneidades. O programa,
denominado GOP (*uias Ïpticos 3lanares), é uma implementação do Método dos Elementos
Finitos para o estudos de guias planares e inclui a técnica de refinamento auto-adaptativo para
discretização de um domínio unidimensional visando o cálculo dos três primeiros modos
ópticos guiados.
O programa GOP foi implementado no ambiente de programação do software Matlab. O
Matlab conta com o recurso de auxílio à criação de interfaces gráficas, uma extensa biblioteca
de funções matemáticas e opção para geração automática de código em linguagem C e C++,
além de uma biblioteca de funções matemáticas e gráficas para criação de códigos
compilados.
Para facilitar a utilização do programa GOP, foi criada uma interface gráfica simples que
gerencia a entrada dos dados para a simulação e apresenta os resultados graficamente.
¢¤£¦¥ ¢¨§ £ ©¤¥¨¥¨¥ © ¥¨¤£ ©¤¥¤£¦¥ ©¤¥¨§¤£ ©¨©¤¥¨¥
! # %$%('
¦) © £
¦) ©¤0
¦) ©¤§
¦) ©¤1
¦) ©¤¢
2 3
45 6
7
89
7@5 A
B
2 5 8 11 14 17 20
Tempo (h)
2.15
2.16
2.17
2.18
IndiceEfetivo
D E](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-27-320.jpg)
![(VSHFLILFDomR GD HVSHVVXUD GH
FDGD FDPDGD GR JXLD
(VFROKD GD FDPDGD SDUD
DWULEXLomR GH GDGRV
'HILQLomR GR PRGR ySWLFR HP
HVWXGR
(QWUDGD GR FRPSULPHQWR GH RQGD
SDUD D DQiOLVH
'DGRV GR SURFHVVR GH
VROXomR FRP UHILQDPHQWR
DXWRDGDSWDWLYR
'HILQLomR GR DUTXLYR GH
SURMHWR H VXD UHVSHFWLYD
GHVFULomR
2So}HV SDUD DSUHVHQWDomR
JUiILFD GH UHVXOWDGRV
$SUHVHQWDomR GH GDGRV GR
SURFHVVR GH GLIXVmR PDLRUHV
GHWDOKHV GR DSOLFDWLYR H R
SURSyVLWR GR SURMHWR
'HWHUPLQDomR GR
WLSR GH JXLD ySWLFR HP HVWXGR
(VFROKD GR 0RGR ySWLFR
SDUD DSUHVHQWDomR
GH UHVXOWDGRV
(VFROKD GR SDVVR GH LWHUDomR
SDUD DSUHVHQWDomR JUiILFD
GRV UHVXOWDGRV
ÉUHD GH 9LVXDOL]DomR GRV
UHVXOWDGRV H DSUHVHQWDomR
GR YDORU GH tQGLFH HIHWLYR
SDUD R PRGR HVFROKLGR](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-30-320.jpg)

![25
(VFROKHU DPDGD Um menu “popup” permite a escolha da camada para atribuição de
propriedades físicas. O menu é contextualizado para as opções de guia homogêneo e difuso.
Todas as camadas devem ser selecionadas antes que o programa permita o prosseguimento da
análise numérica. Caso haja necessidade de alterar os dados referentes a alguma camada,
basta selecioná-la para acessar os valores já atribuídos.
(VSHVVXUD GD DPDGD Este campo permite a atribuição da espessura de cada camada
do guia planar. A espessura deve ser fornecida em mícron.
3URSULHGDGHV ItVLFDV 7HQVRU GH ËQGLFHV GH 5HIUDomR Este campo permite a
atribuição de índices de refração para camadas homogêneas do guia planar. O aplicativo
permite tratar meios materiais com anisotropia diagonal do tensor de índices de refração.
3URFHVVR GH 'LIXVmR RUWH GR /L1E2 No caso de guias difusos do tipo Ti:LiNbO3,
deve-se definir a orientação dos eixos cristalinos do substrato de LiNbO3 com relação ao
sistema de referência utilizado para a equação de onda. Na área de estudo de estado sólido, a
orientação dos eixos cristalinos recebe o nome de RUWH. No caso de substratos de LiNbO3
com Corte-X, tem-se que o eixo cristalino associado ao índice de refração Q¡ coincide com o
eixo cartesiano , enquanto o eixo cristalino associado ao índice de refração Q¢ coincide com o
eixo cartesiano [. No caso do Corte-Z, tem-se que o eixo cristalino associado ao índice de
refração Q¡ coincide com o eixo cartesiano [, enquanto o eixo cristalino associado ao índice de
refração Q¢ coincide com o eixo cartesiano . Em todas as análises do programa GOP, será
considerado que a onda propaga-se ao longo do eixo cristalino Y, que coincide com o eixo
cartesiano ].
3URFHVVR GH 'LIXVmR (VSHVVXUD GR )LOPH GH 7LWkQLR Neste campo, o usuário define
a espessura do filme fino de titânio a ser utilizado no processo de difusão em substrato de
LiNbO3. As espessuras devem ser fornecidas em nanômetro (nm).
3URFHVVR GH 'LIXVmR ± 7HPSHUDWXUD GH 'LIXVmR Campo para definição da
temperatura utilizada para o processo de difusão. A temperatura deve ser fornecida em graus
Celsius (o
C).
3URFHVVR GH 'LIXVmR ± 7HPSR GH 'LIXVmR Campo para definição do tempo total
utilizado para o processo de difusão. O tempo de difusão deve ser fornecido em horas (h).
$WULEXLomR GH 9DORUHV j DPDGD H ([HFXWDU $QiOLVH Ao final das atribuições de
cada camada, o botão será ativado e apresentará a mensagem: $WULEXLU 9DORUHV j DPDGD.
Pressionando esse botão, os valores atribuídos para os campos de entrada, para a camada
escolhida, serão armazenados. Após todas as camadas receberem os dados de entrada, o botão
passará a apresentar a seguinte mensagem: ([HFXWDU $QiOLVH e quando pressionado, serão
iniciados os cálculos para a análise modal do guia óptico planar.
4
5
6
7
8
9
10
11](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-32-320.jpg)
![26
2So}HV SDUD 9LVXDOL]DomR *UiILFD GH 5HVXOWDGRV
No programa GOP, as opções para apresentação de resultados estão agrupadas em uma
região, delimitada por uma caixa de cor vermelha, que recebeu o nome 5HVXOWDGRV. A Fig. 9
apresenta detalhes dos elementos de interface associados à apresentação de resultados.
Fig. 9 Campos para definição das opções para apresentação de resultados no programa GOP.
1~PHUR GH (OHPHQWRV *HUDGRV Após a análise, o aplicativo apresenta o número
total de elementos finitos gerados durante o processo de refinamento auto-adaptativo.
7HPSR GH ([HFXomR Este campo apresenta o tempo total de simulação do guia
planar. O intervalo de tempo é apresentado em segundos (s).
1~PHUR GH ,WHUDo}HV Este campo apresenta o número total de iterações do processo
auto-adaptativo utilizado para a simulação das características modais do guia óptico planar,
satisfazendo o critério de precisão adotado (estabilização dos valores de índice efetivo até a
sétima casa decimal).
12
13
14
16
22
15
17
18
19
20
21
12
13
14](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-33-320.jpg)

![28
9LVXDOL]DomR GH 5HVXOWDGRV
Para demonstrar a utilização do programa GOP e a forma como os resultados podem ser
apresentados, foi realizada uma simulação para a determinação dos possíveis modos de
propagação em um guia óptico planar difuso formado pela difusão de Titânio (Ti) em
substrato de Niobato de Lítio (LiNbO3) . Os parâmetros utilizados na simulação foram:
• Comprimento de onda de 1 µm,
• Modo Ex
• Guia Difuso Ti:LiNbO3
• Camada de cobertura de 5 µm de espessura
• Índices de refração da camada de cobertura: Q =Q¡ =Q¢ =1
• Camada de substrato de 40 µm de espessura
• Processo de difusão:
• Corte-X
• Espessura do filme de Ti : H=80 nm
• Temperatura de difusão: T=1050 o
C
• Tempo de difusão: t=6 h
A malha inicial de elementos finitos é automaticamente gerada pelo programa GOP e consta
de 15 elementos em cada uma das camadas do guia difuso (cobertura e substrato). Após o
processo de refinamento auto-adaptativo, que finalizou após 12 iterações, o número total de
elementos finitos na malha é de 3687 e o tempo total de CPU utilizado foi de 67,726
segundos, esses resultados são apresentados na interface, como mostrado na Fig. 10.
Fig. 10 Apresentação de dados relativos ao número total de elementos na malha, tempo de processamento e
número total de iterações.
Os valores inseridos como parâmetros para o processo de difusão de Titânio e o comprimento
de onda possibilitam calcular o perfil de índices de refração extraordinário (Q¡ ) e ordinário
(Q¢ ) na região em que o guia difuso é formado. O perfil de índices de refração Q¡ e Q¢ pode ser
visualizado no campo de gráficos acionando a opção 3HUILO GR ËQGLFH GH 5HIUDomR e
escolhendo qual o índice desejado NE ou NO (Fig.11). A distribuição de índices pode ser
visualizada para cada passo de refinamento auto-adaptativo.
Fig. 11 Botão para escolha da opção de visualização do perfil de índices de refração.](https://image.slidesharecdn.com/6dabb168-9570-4486-8f3b-fb5f440feff4-160412013749/85/Relatorio-I-35-320.jpg)




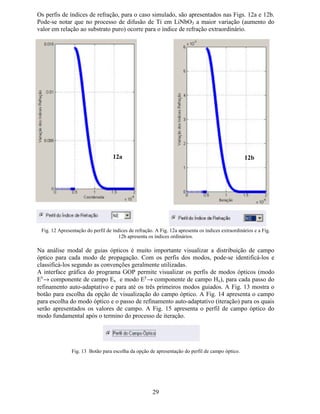
Este relatório científico descreve um projeto que tem como objetivo aplicar o Método dos Elementos Finitos (MEF) para resolver problemas do eletromagnetismo, como a análise modal de guias ópticos planares. O trabalho envolve desenvolver programas MEF unidimensionais e bidimensionais, adaptá-los para execução em sistemas de computação distribuída, e realizar estudos comparativos de desempenho. Os programas desenvolvidos terão capacidade de refinar automaticamente a malha de elementos finitos.





































![Simulacao conf chapas [modo de compatibilidade]](https://cdn.slidesharecdn.com/ss_thumbnails/simulacaoconfchapasmododecompatibilidade-131204180010-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





