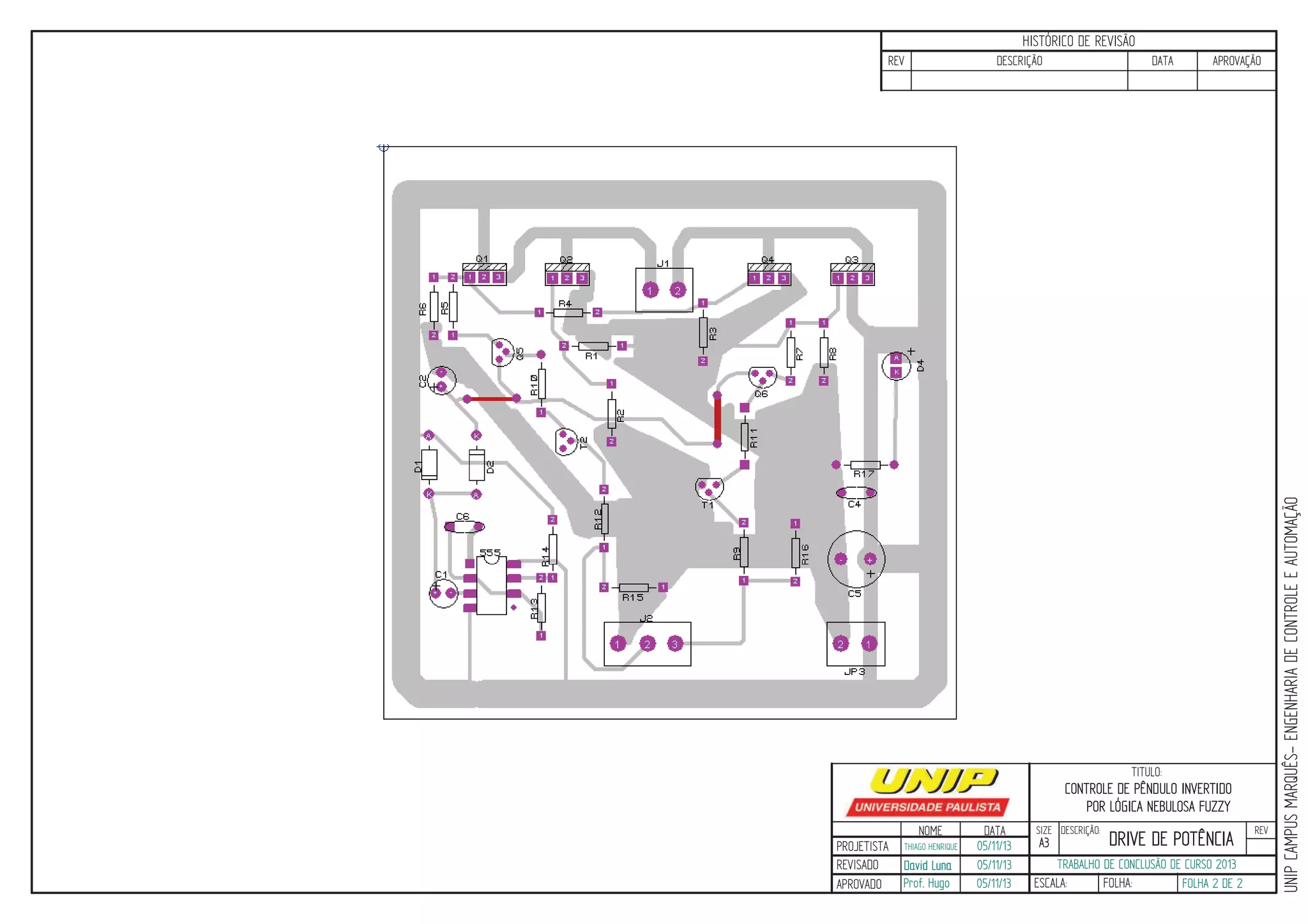
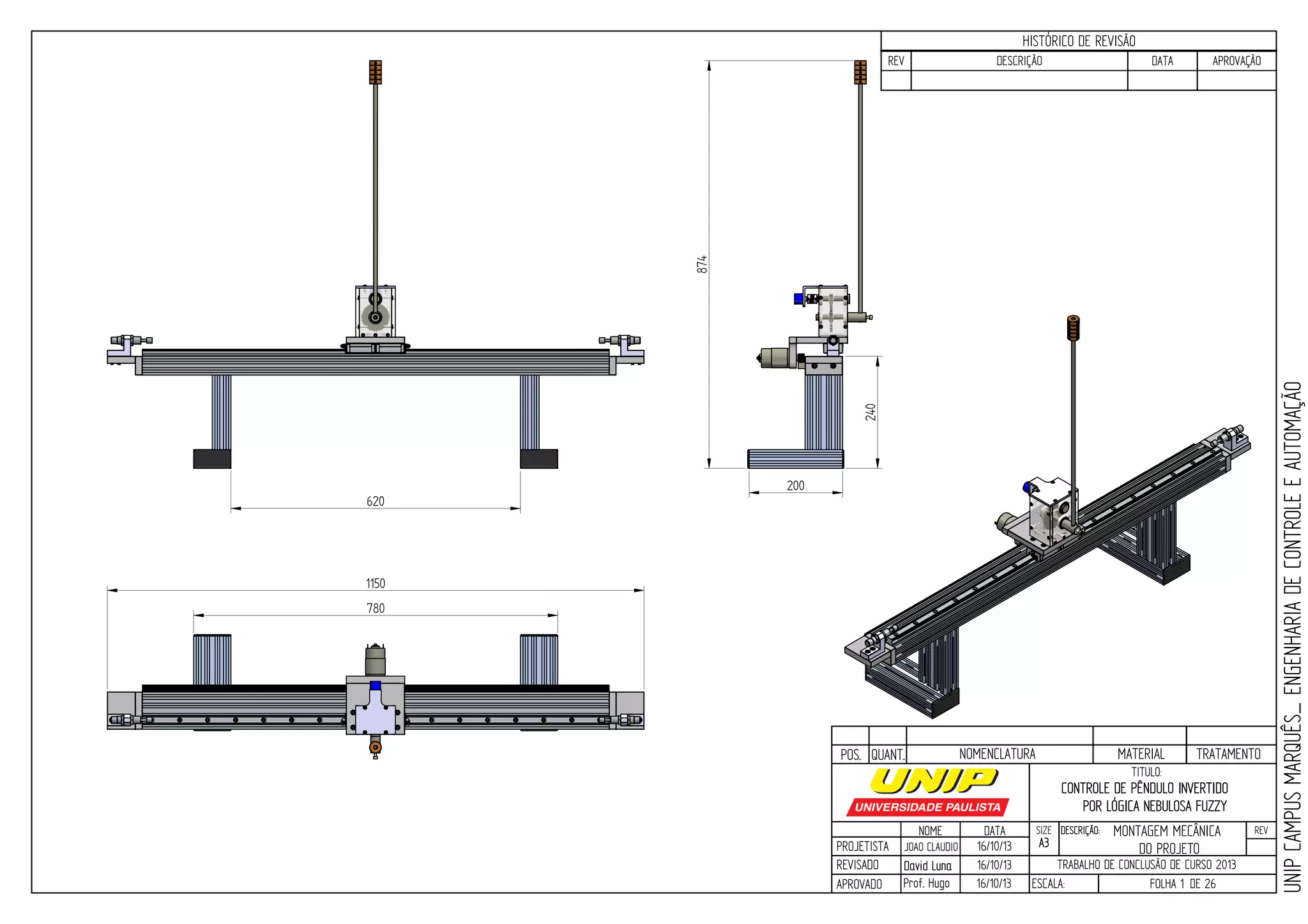
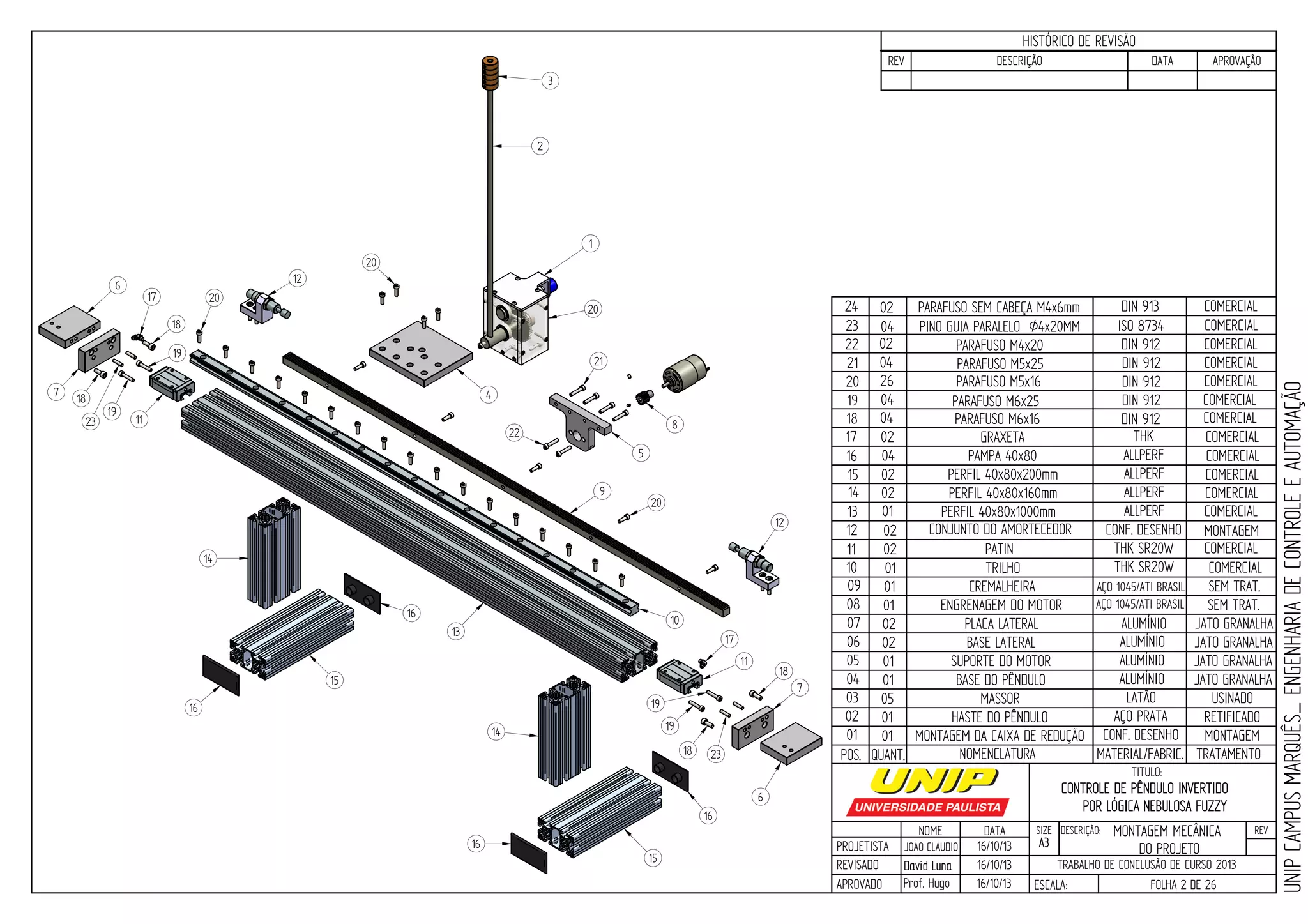
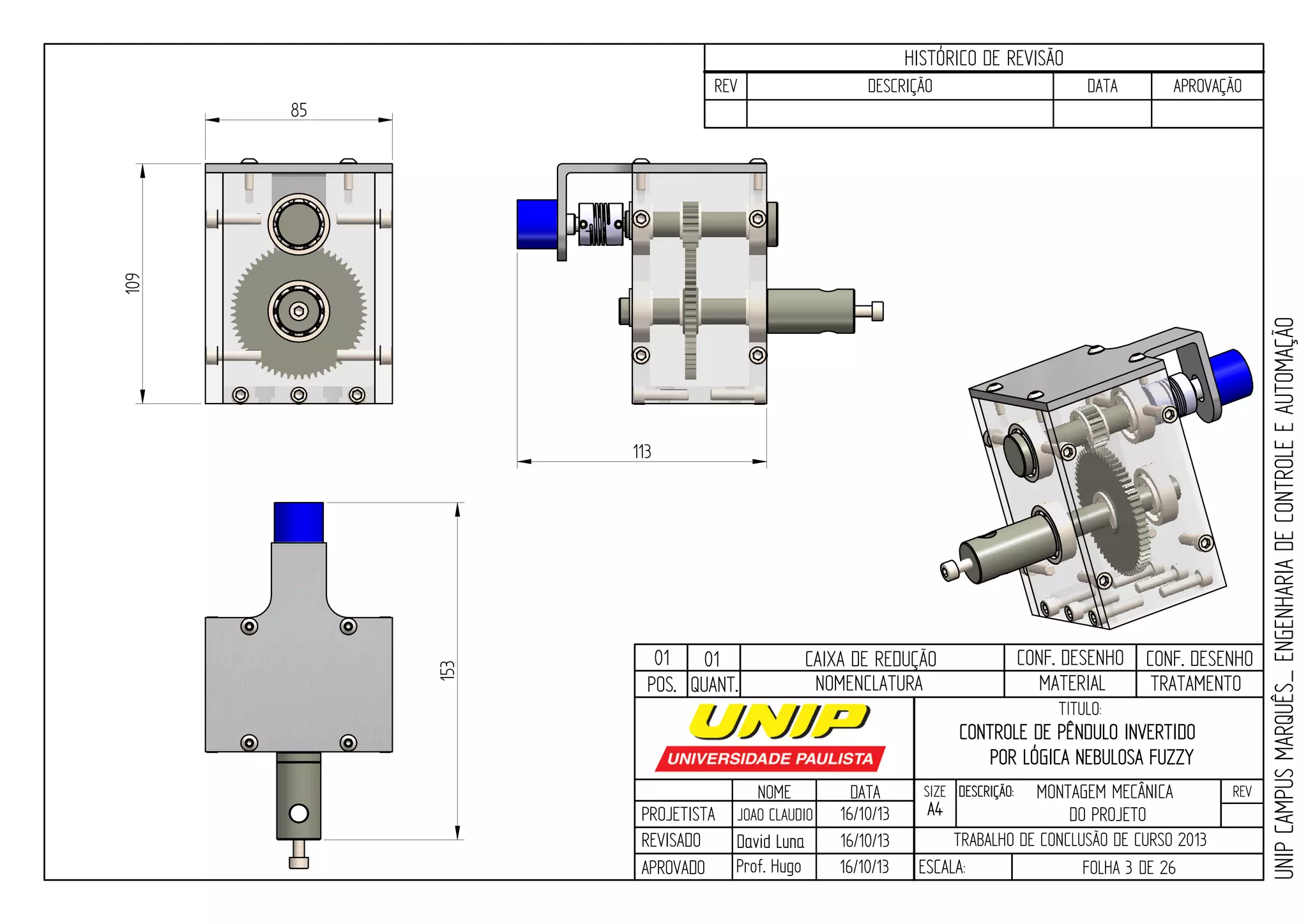
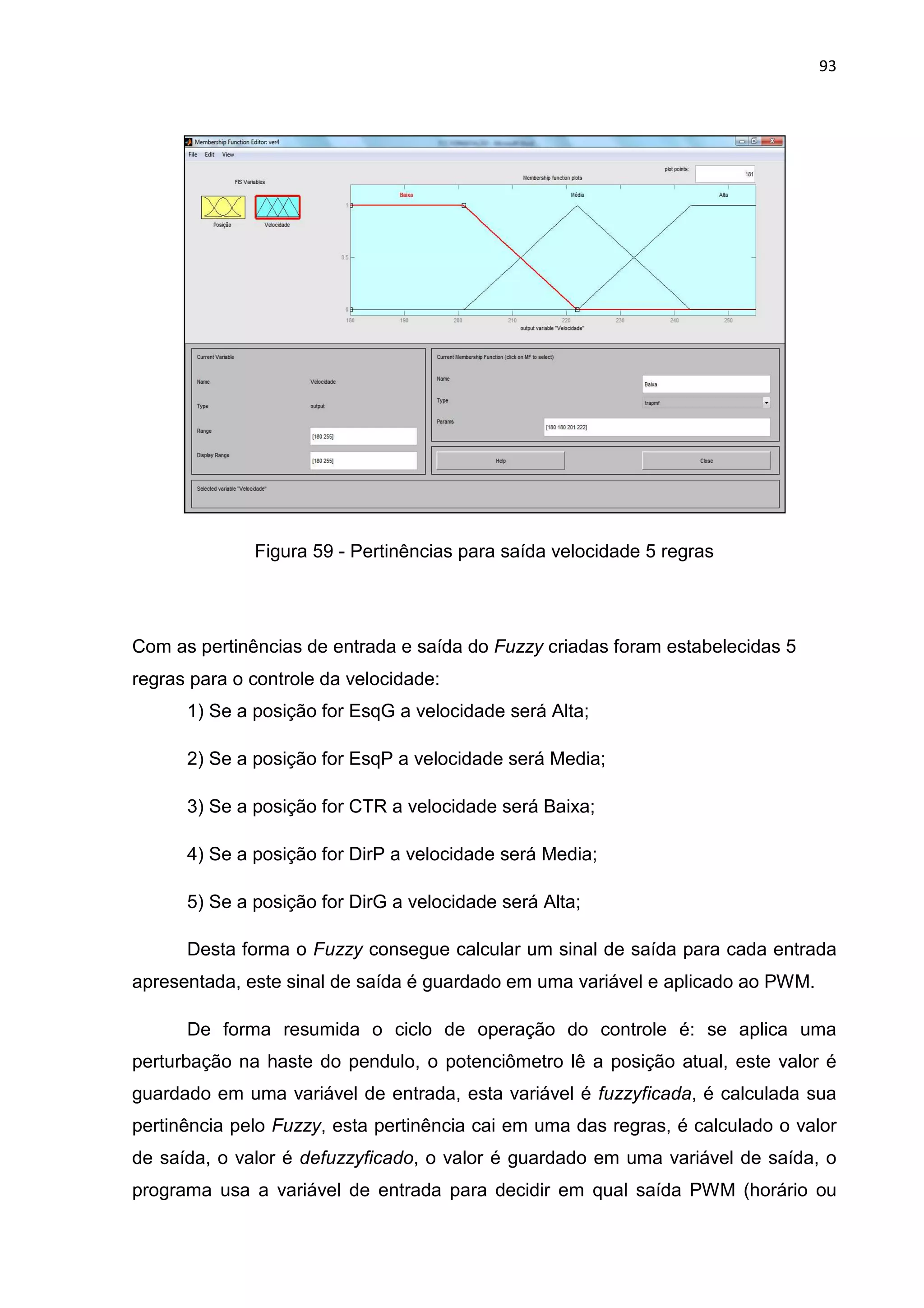
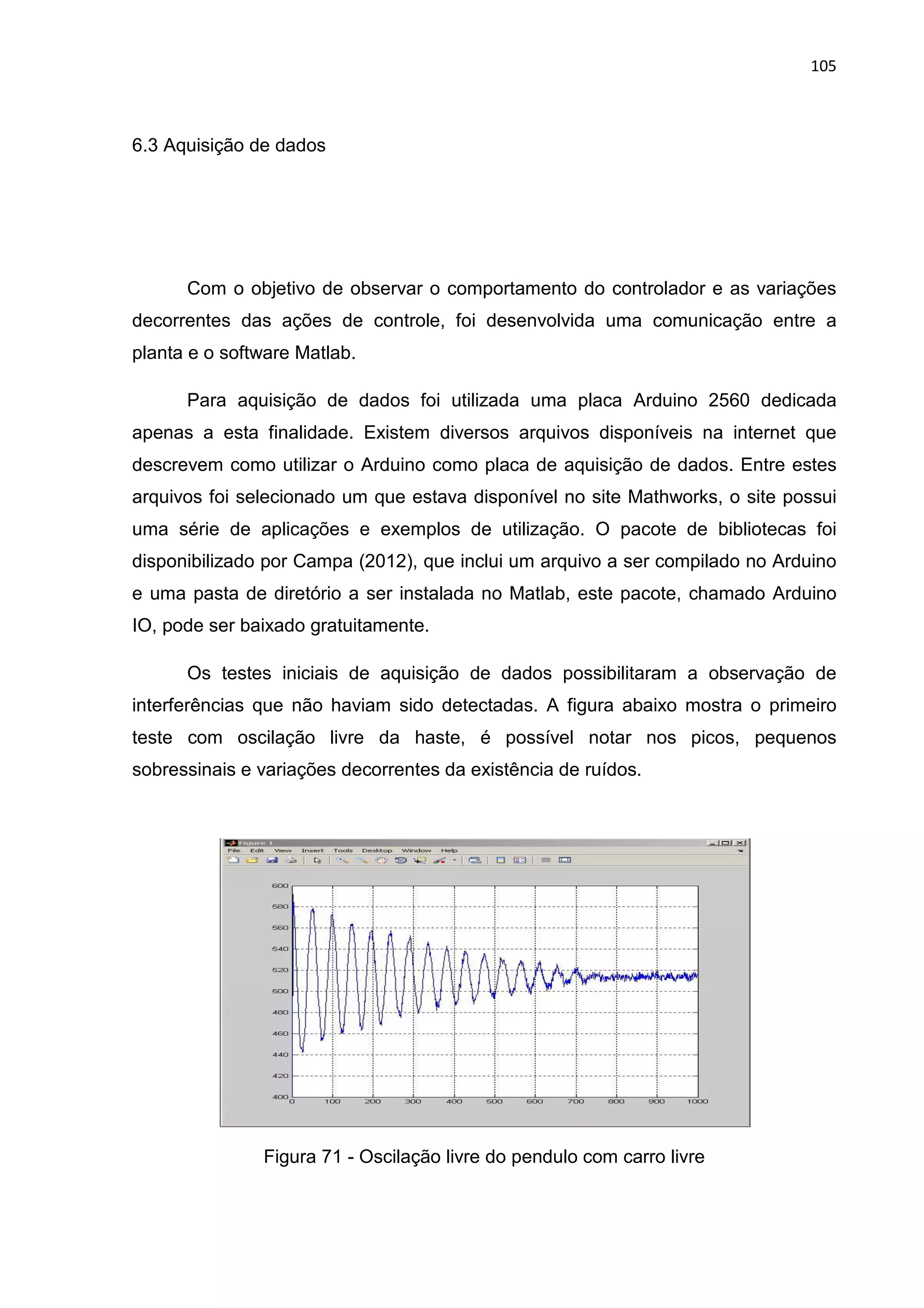
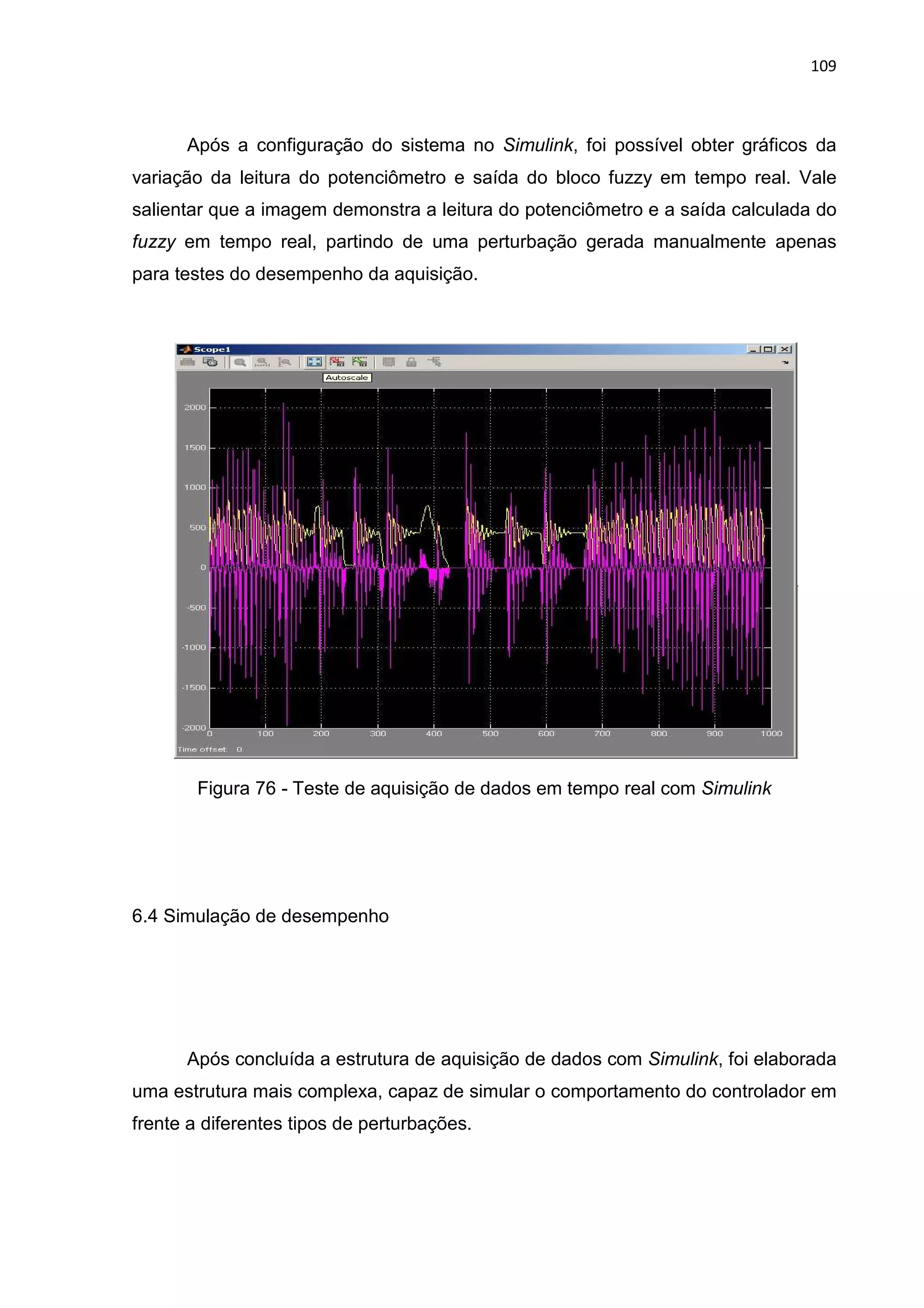
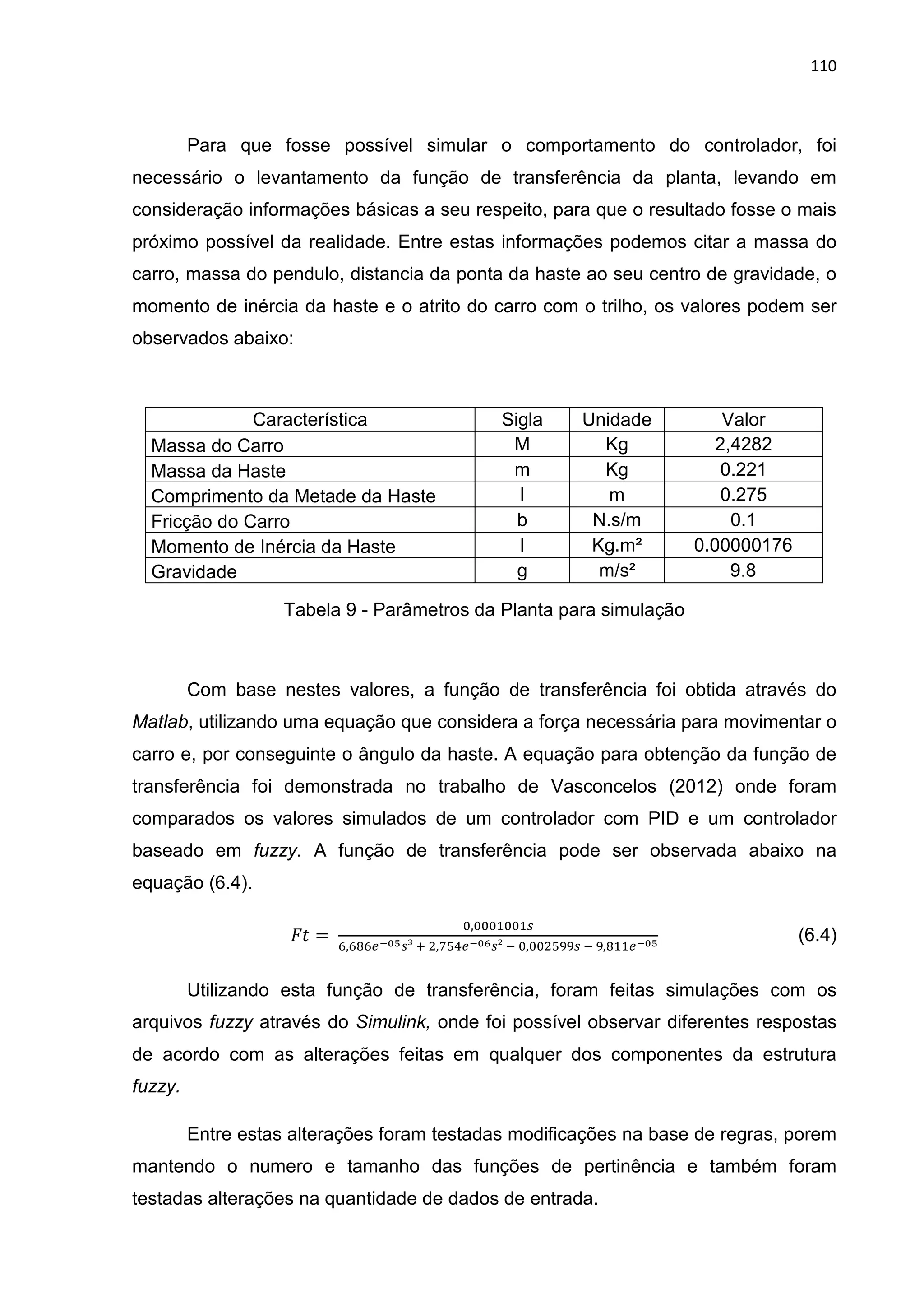
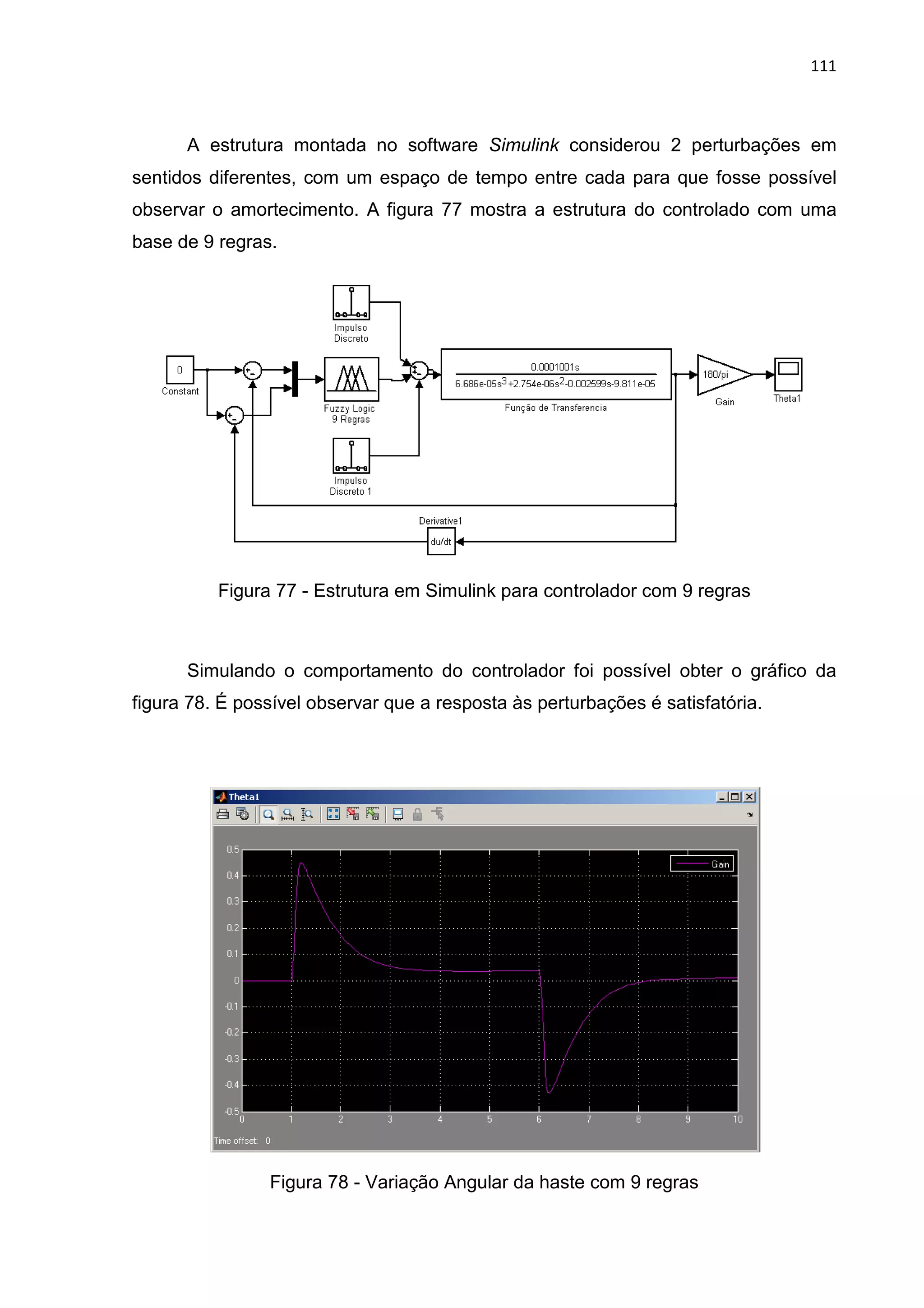
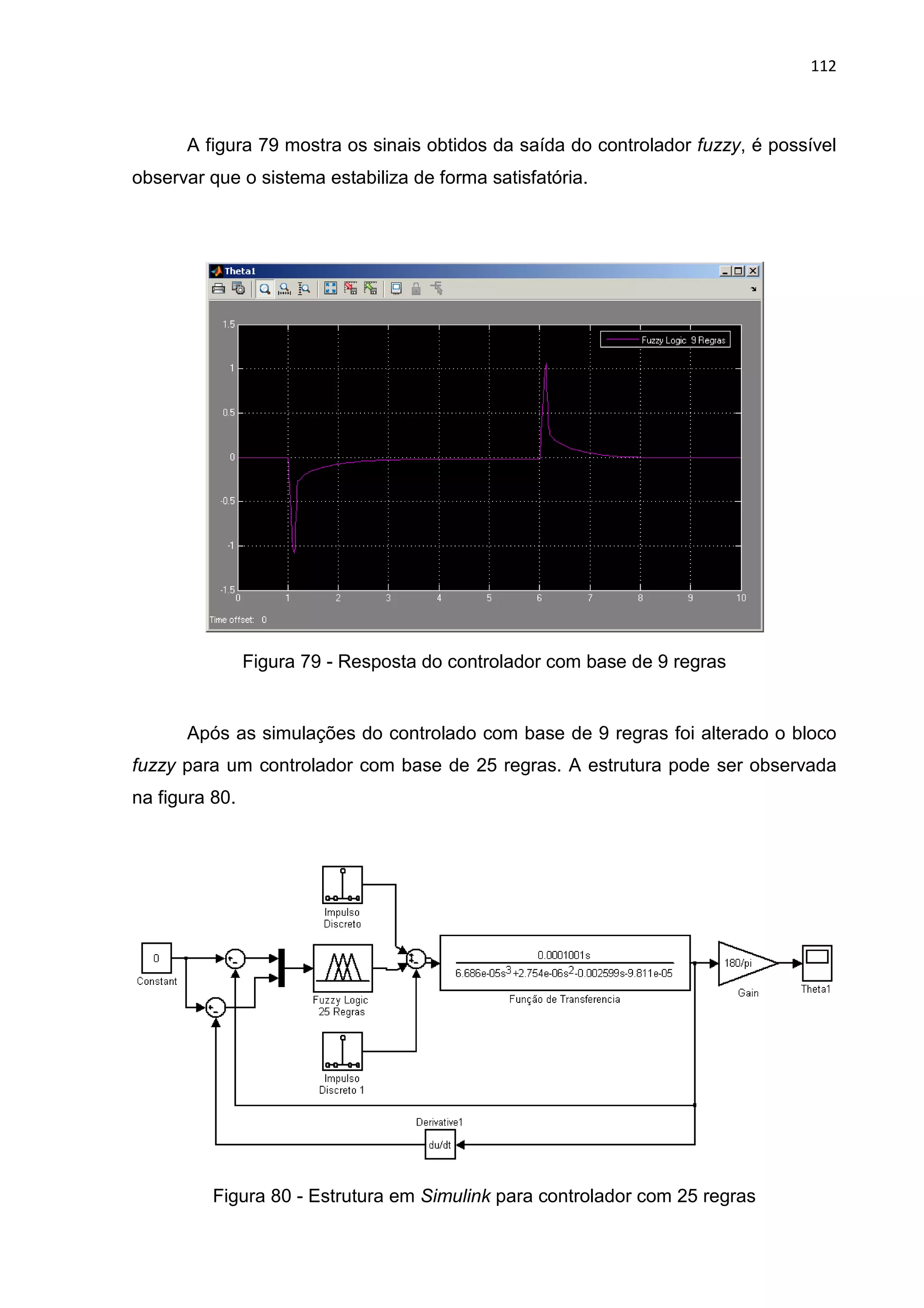
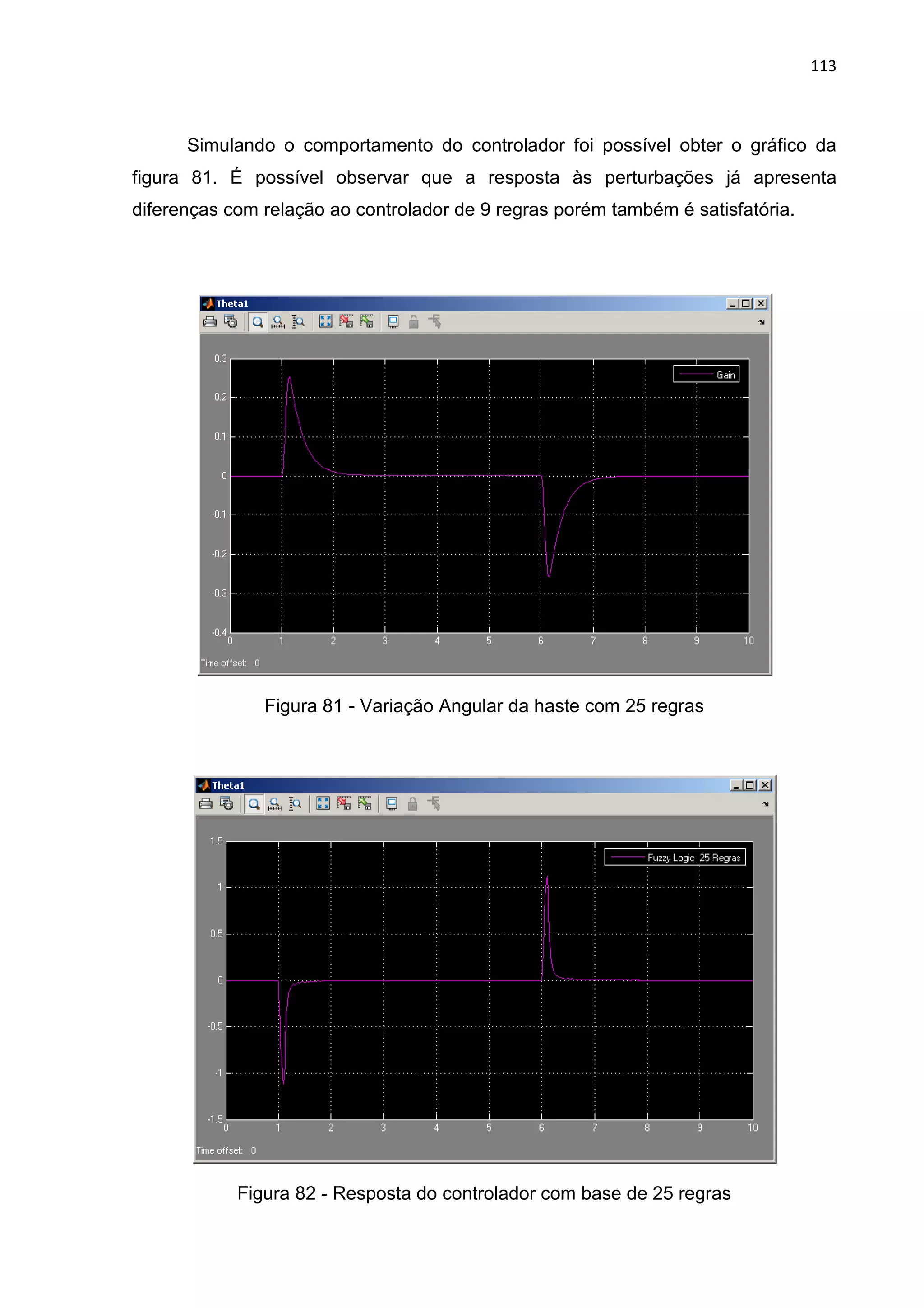
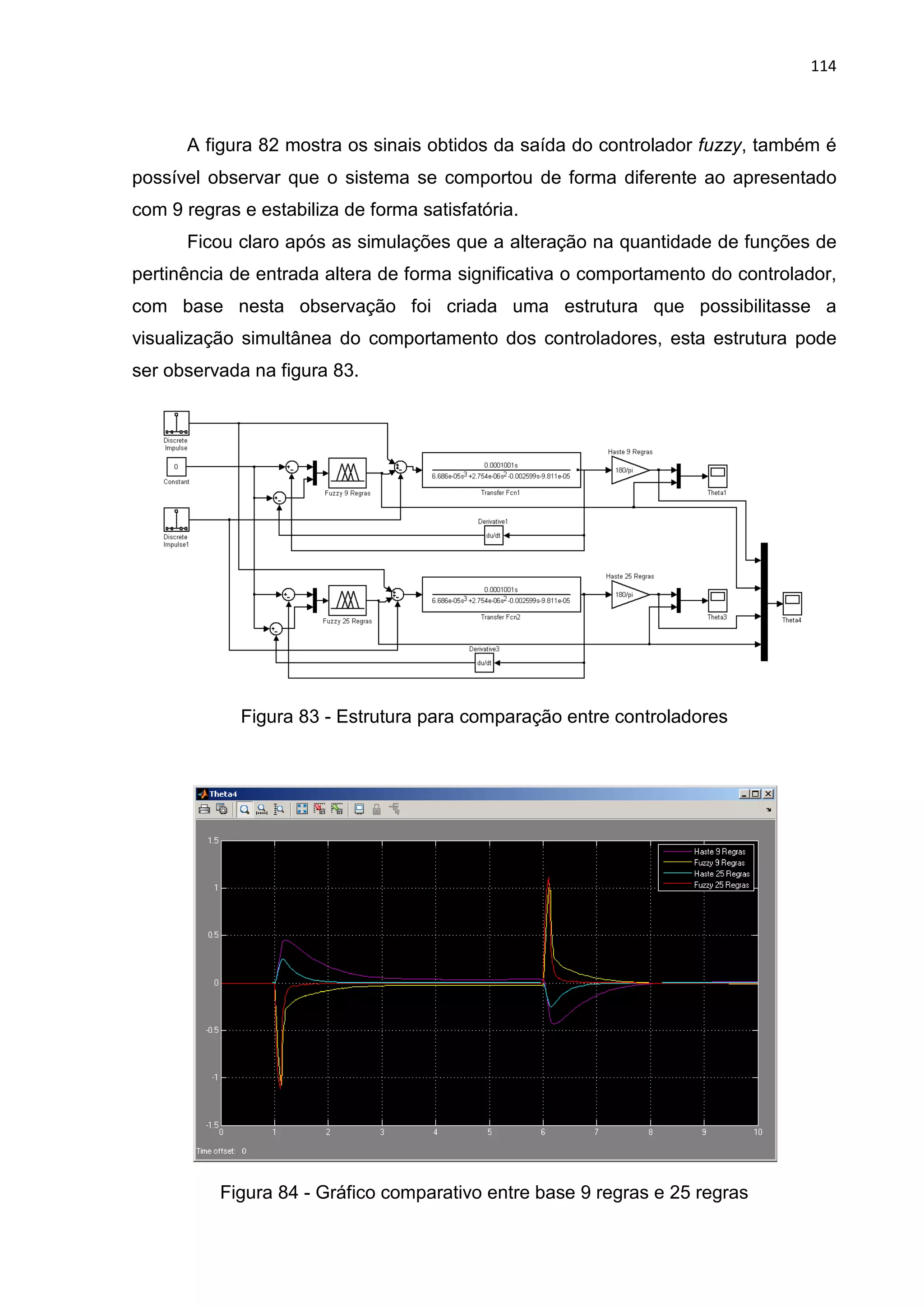
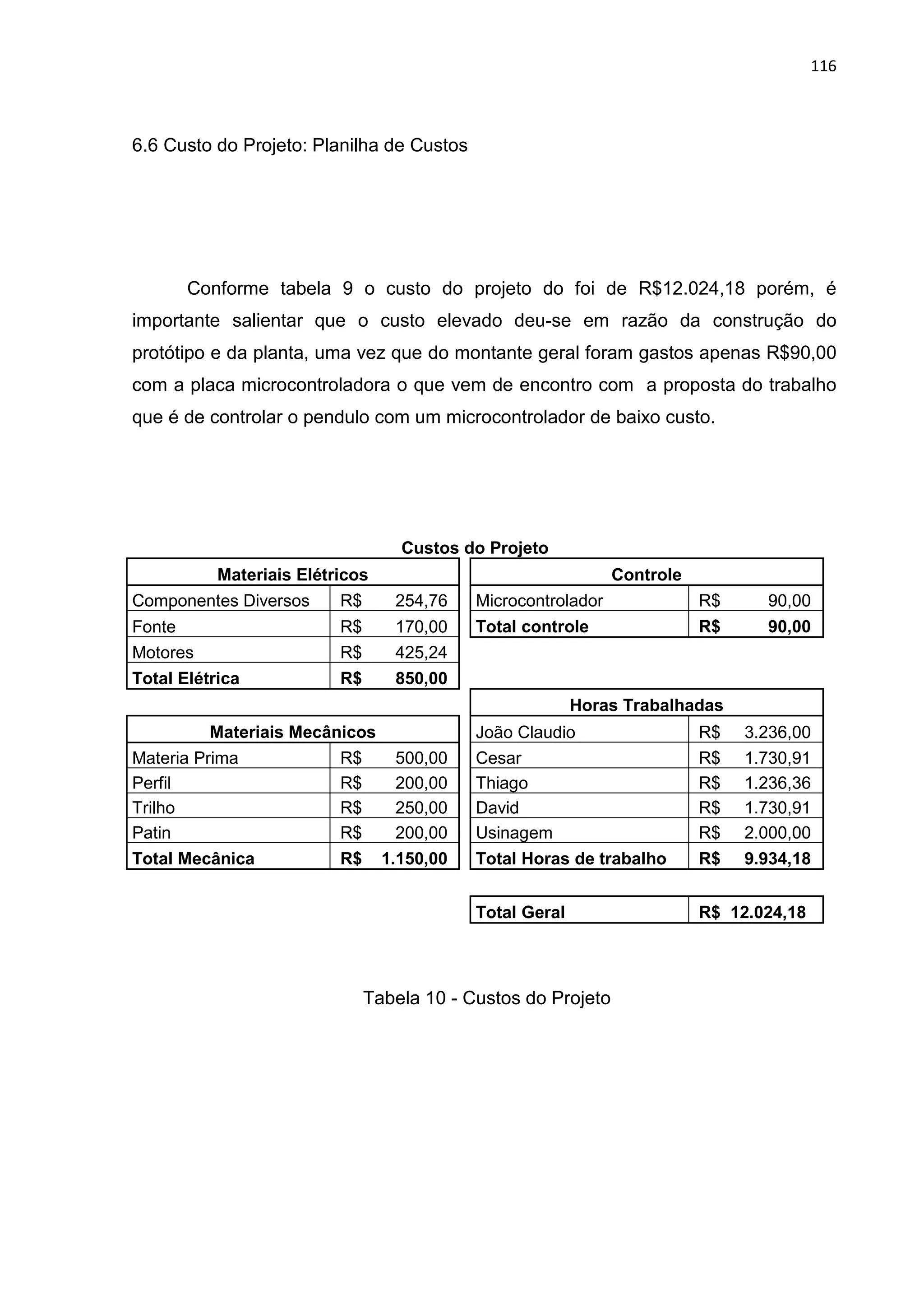
O documento descreve um projeto de conclusão de curso de engenharia que construiu e controlou um sistema de pendulo invertido utilizando lógica fuzzy em um microcontrolador. Foi construído um protótipo inicial e uma planta maior para testes. O sistema de controle fuzzy foi implementado no microcontrolador Arduino e mostrou bons resultados no controle do pendulo invertido.
![Sistema com pendulo invertido utilizando lógica Fuzzy / Cesar Humberto
Modesti ... [et al.]. – 2013.
175 f. : il. color.
Trabalho de Conclusão de Curso (graduação) – Universidade Paulista,
Instituto de Ciências e Tecnologia, 2013.
Orientação: Prof. Hugo Martins Magalhães
Co-Orientação: Prof. Rafael Bachega
1. MICROCONTROLADOR. 2. SISTEMAS DE CONTROLE. 3.
SISTEMAS NÃO LINEARES. I. Modesti, Cesar Humberto. II.
Magalhães, Hugo Martins, orient. II. Bachega, Rafael, co-orient.](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-3-2048.jpg)




![37
abrangendo mais variáveis de forma a aproximar ao máximo os resultados obtidos
na simulação com a realidade.
= + < =(1);
@ = i @ + B<(1)1@;
Ẍ = Ẍ + B<(1) 1D – < =(1) 1@ ; (1.1)
= + B<(1);
@ = @ – < =(1) 1@; @ = 0;
D = − < =(1) 1D – B<(1) θ@². (1.2)
Somando as forças na direção do eixo X tem-se a força horizontal
representada por H, como segue em (1.3) e (1.4).
∑ = " D ; (1.3)
= "[ẌL + B<(1)1D − < =(1)1@² ],
= " D + " B<(1) 1D – " < =(1) 1@². (1.4)
Somando as forças na direção do eixo Y tem-se a força vertical representada
por V, como segue em (1.5) e (1.6).
∑ O = " D (1.5)
) – " = "[− < =(1)1D − B<(1)1@² ],
) = −" < =(1)1D – " B<(1) 1@² + " . (1.6)
Modelando a soma dos momentos de inércia temos (1.7) e (1.8).
∑! = 1D + θ@ (1.7)
) < =(1) – B<(1) = 1D + 1@ (1.8)](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-38-2048.jpg)
![38
Combinando as equações de forma a obter a redução vem:
1D + 1@ = ) < =(1) – B<(1);
1D + 1@ = Q−" < =(1)1D – " B<(1)1@ + " R < =(1)–
−[" D + " B<(1)1D – " < =(1) 1@ ] B<(1);
1D + 1@ = −" ²< =²(1)1D – " ²< =(1) B<(1)1@² −
+ " < =(1) – " D B<(1) – " ² B<²(1) 1D +
+" ²< =(1) B<(1)1@²;
1D + 1@ = −" ² 1D + " < =(1) − " D B<(1);
( + " ²)1D + 1@ – " < =(1) = −" D B< (1). (1.9)
Adotando que o pendulo seja feito de haste uniforme, possuindo momento de
inércia de
ST
U
e também que 1 é muito pequeno, temos:
4
3
" 1D(&) + 1@(&) − " 1(&) = −" D (&);
1D +
UXY
Z ST
1 −@ U
ZS
1 = −
U
ZS
XD . (1.10)
Aplicando a nomenclatura definida a seguir à transformada de Laplace
podemos obter a função de transferência típica do sistema do pendulo invertido.
2]^_ =
UXY
Z S²
, ^_² =
U
ZS
, =
U
ZS
, (1.11)
1D(&) + 2]^_1@(&) − ^_²1(&) = −
D (&) (1.12)
`( )
a( )
=
b c ²
²d efg bfg²
(1.13)
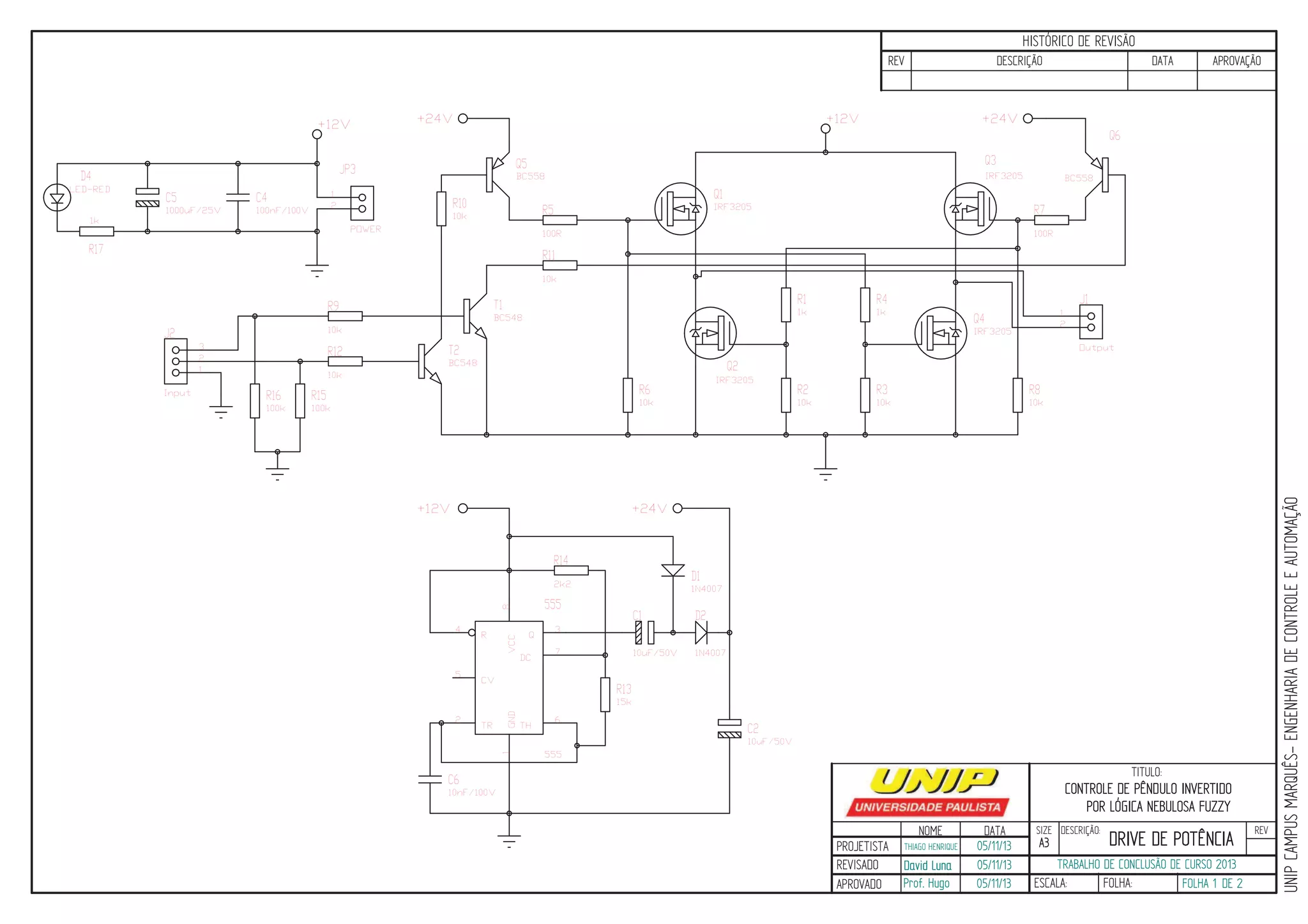
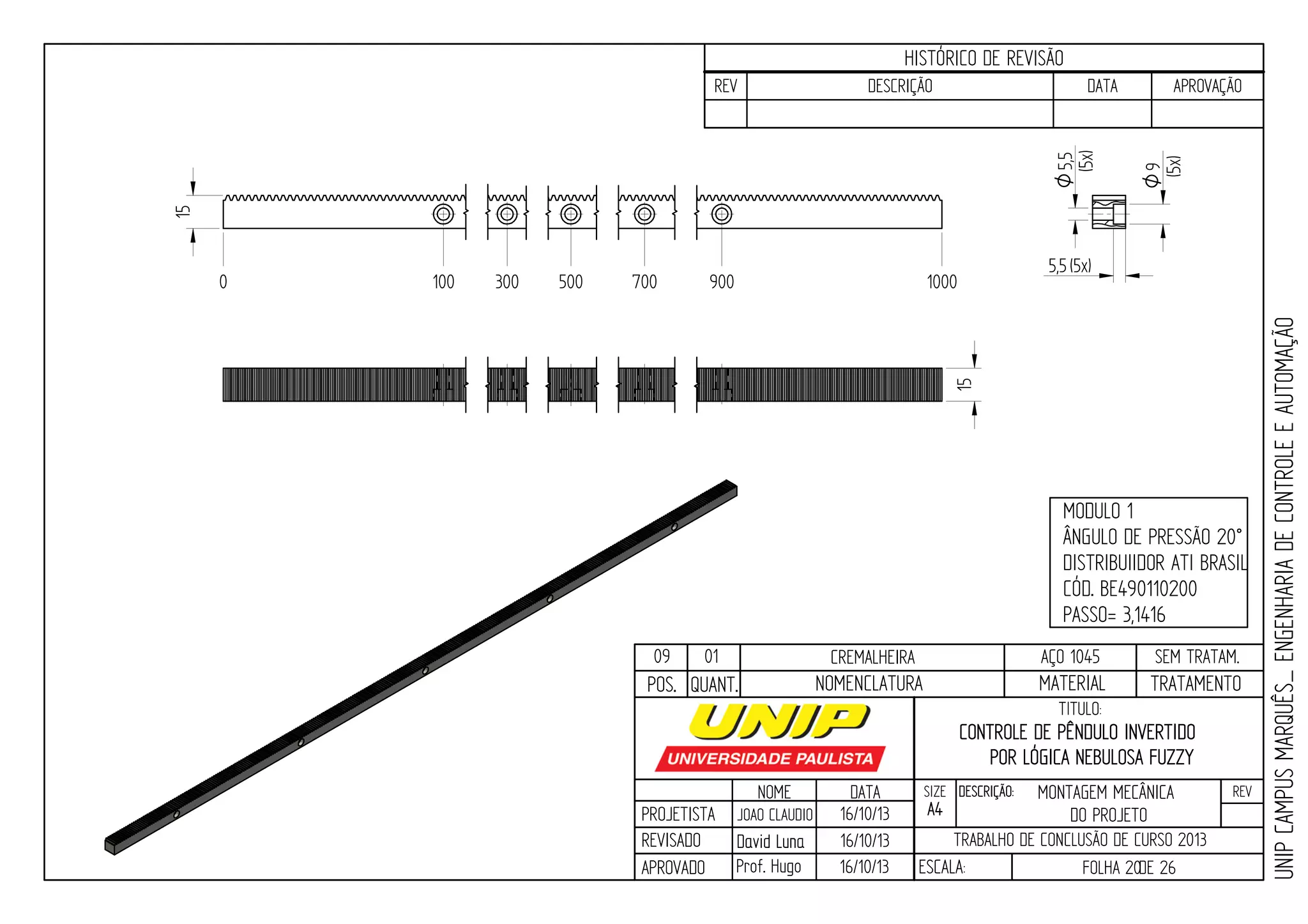
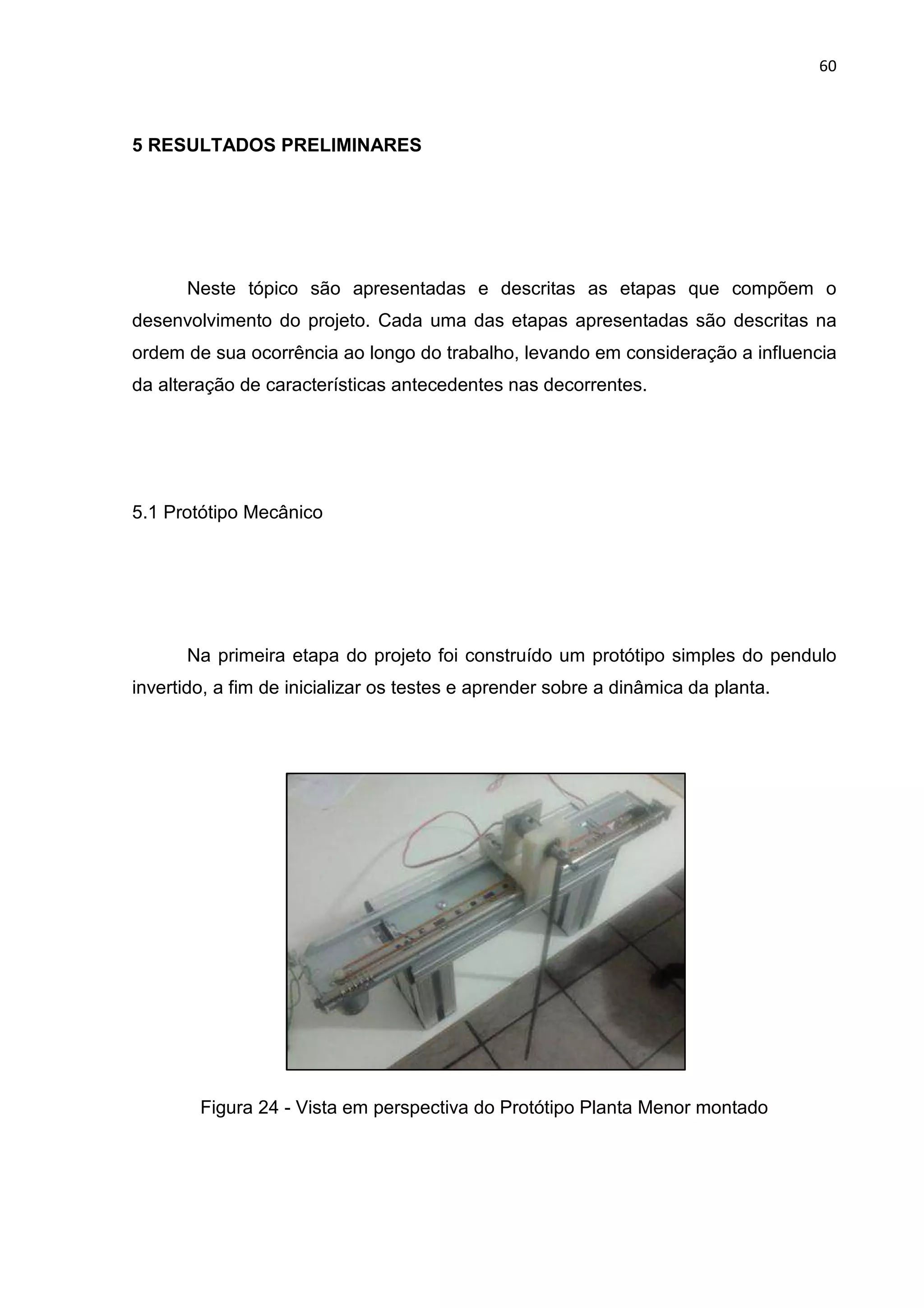
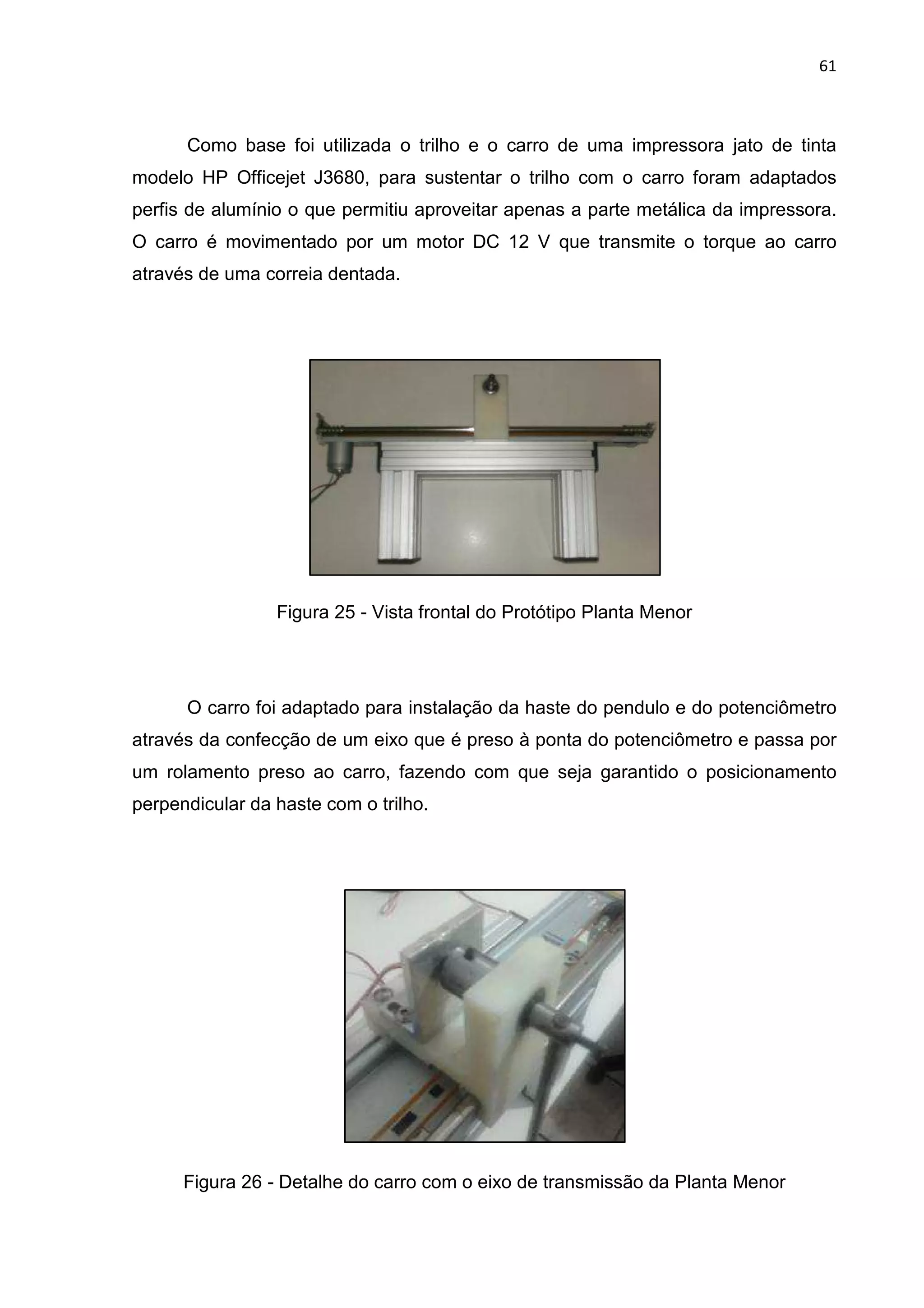
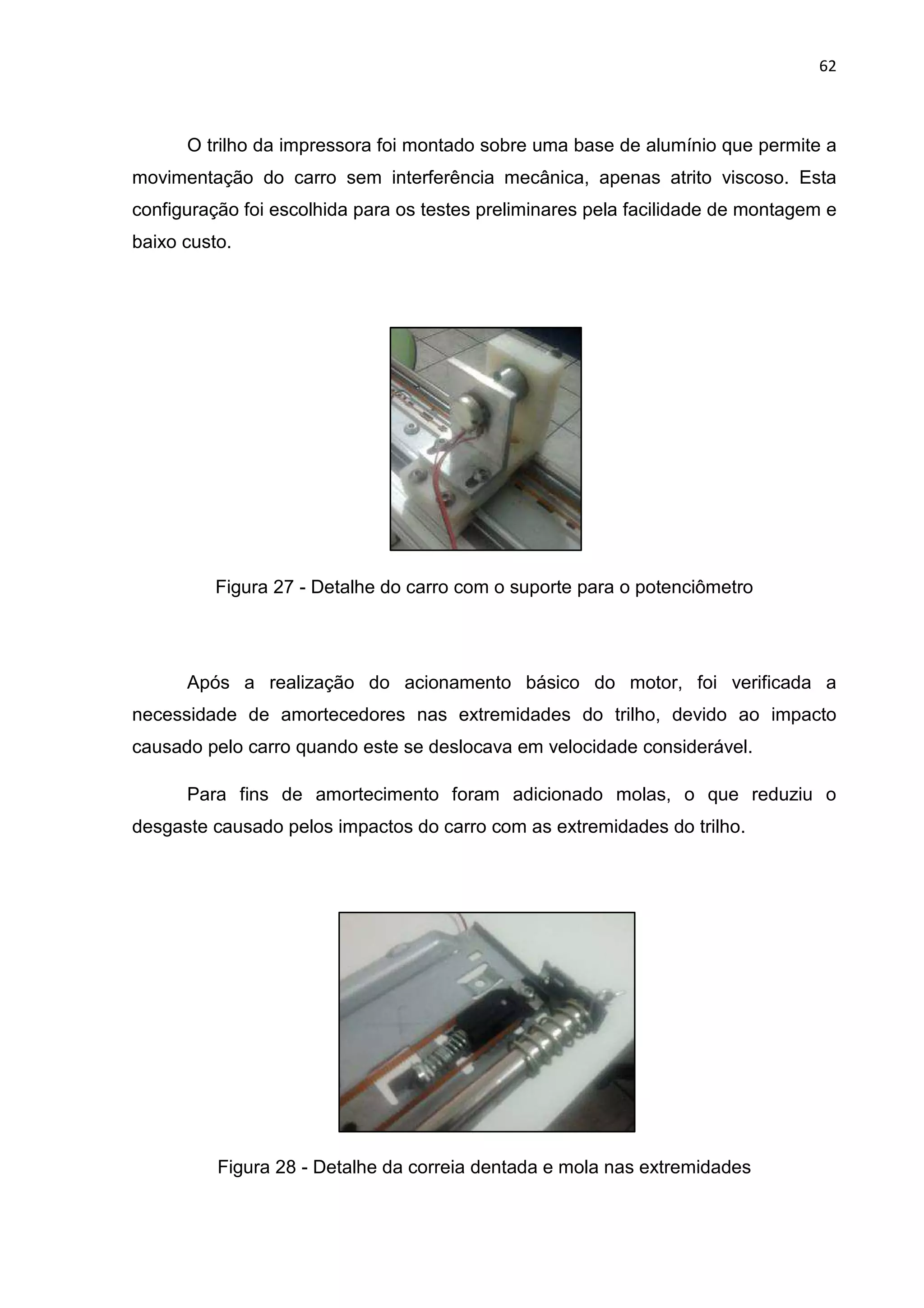
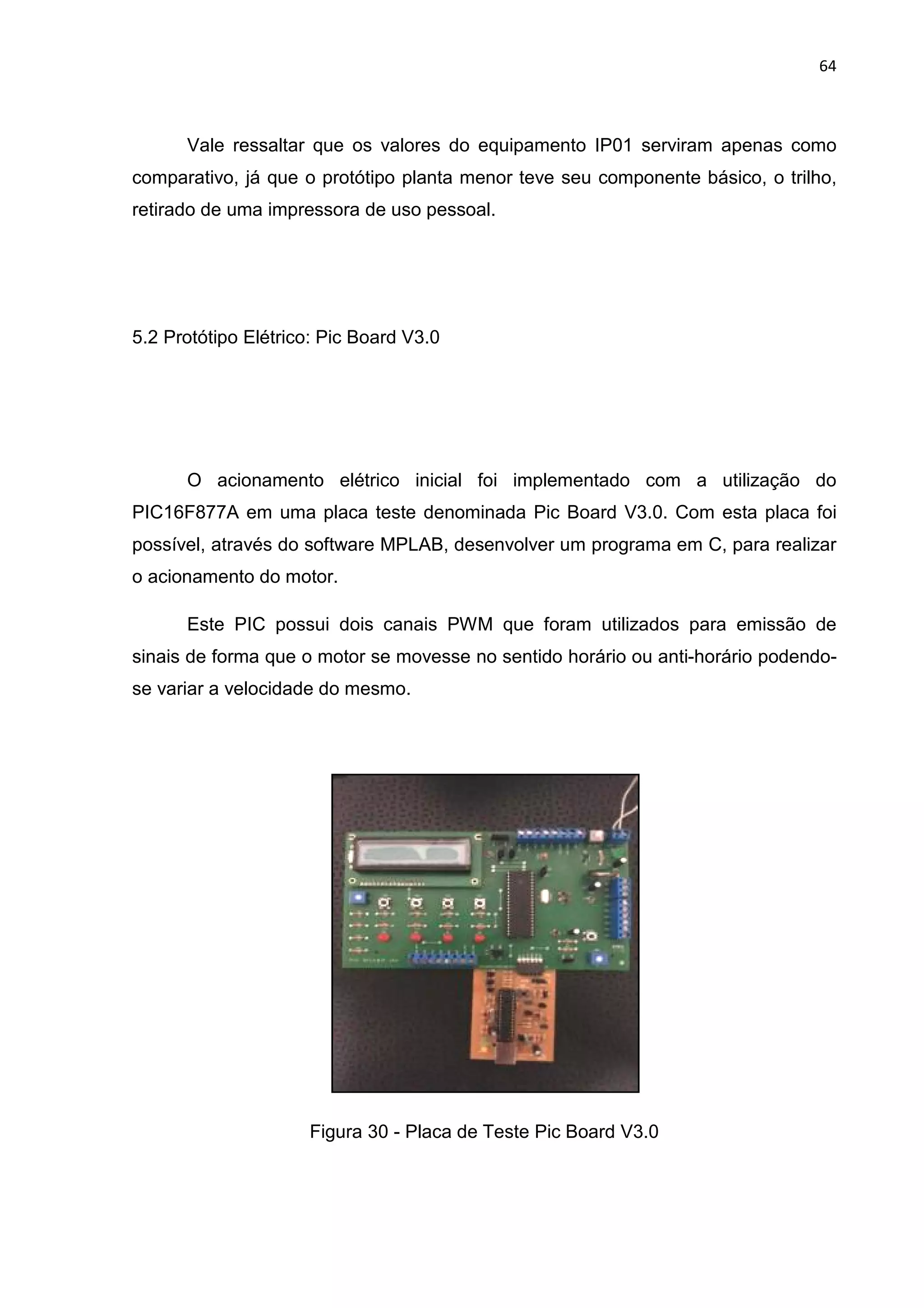
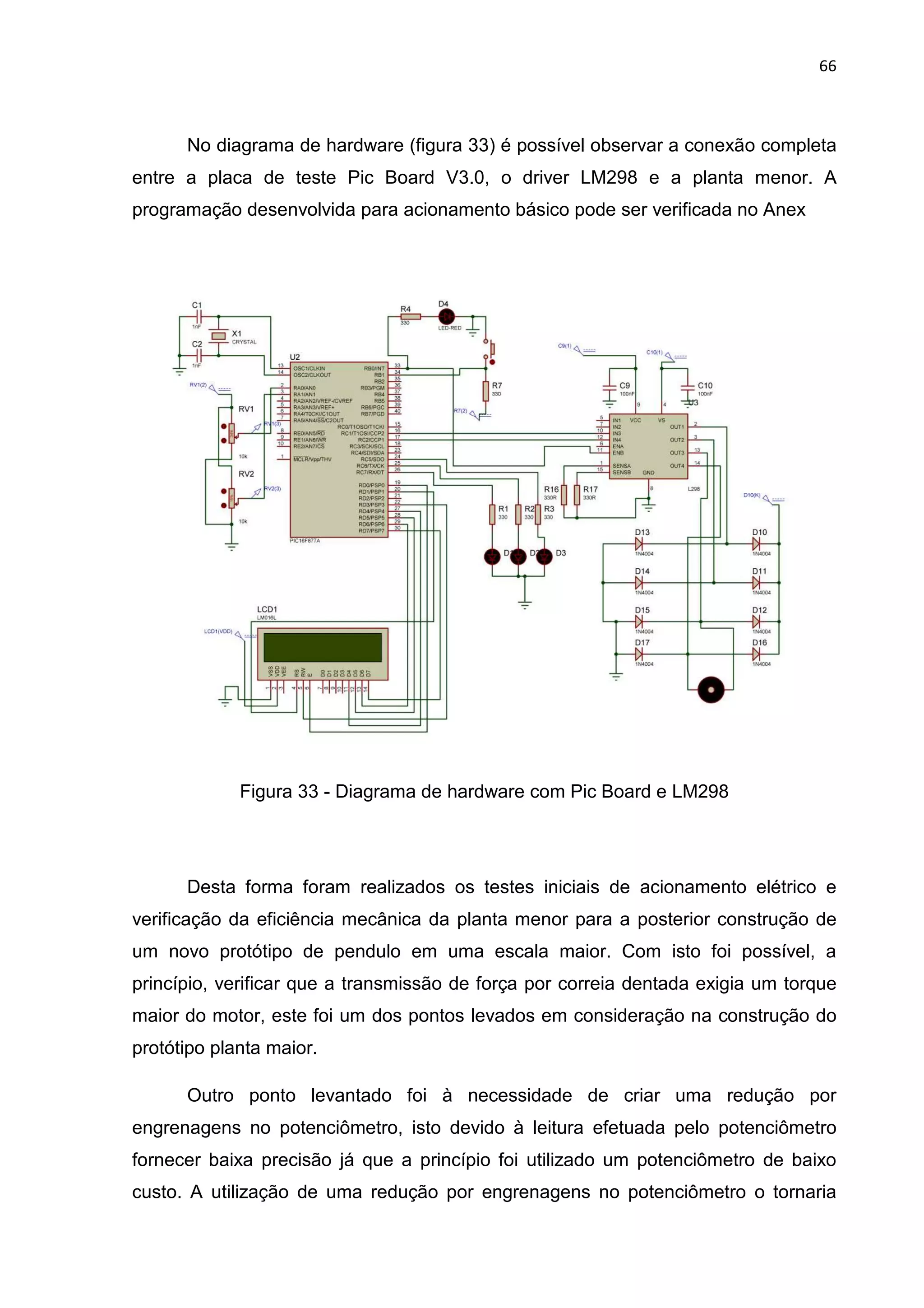
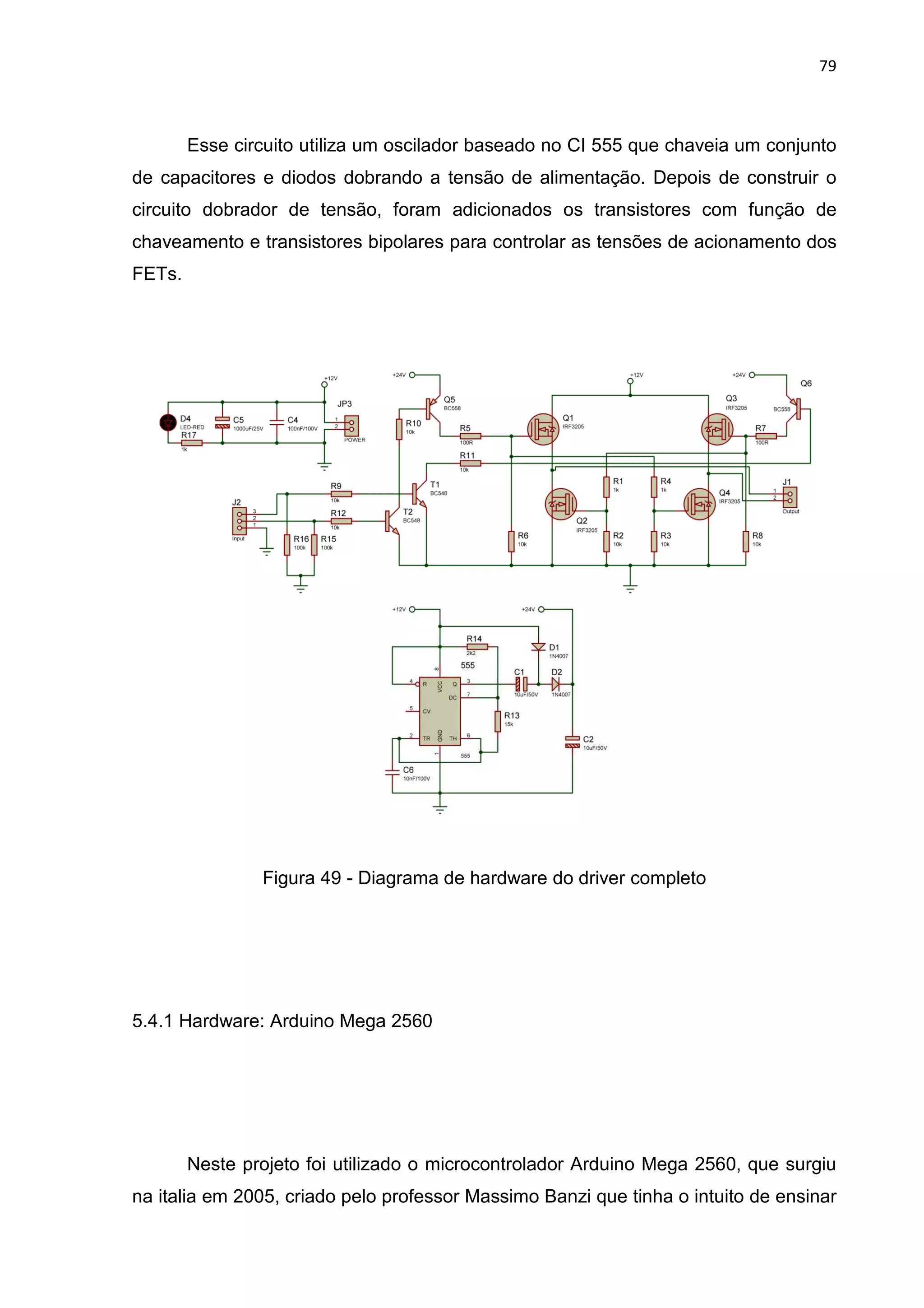
Para controlar o pendulo invertido na posição vertical é utilizado um carro que
se desloca ao longo de um eixo através de uma correia dentada, que por sua vez
recebe um torque de um motor de corrente contínua. O motor é controlado através
de um driver amplificador que recebe um sinal do microcontrolador. As seguintes](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-39-2048.jpg)


![47
3.4 Lógica Fuzzy
A lógica fuzzy, ou lógica nebulosa, foi desenvolvida por Zadeh (1965), que
propôs uma nova forma de tratar conjuntos de informações. Ao contrário da lógica
clássica, binária [0,1], em que algo é verdadeiro ou não, a lógica fuzzy permite o
tratamento de informações qualitativas, possibilitando um funcionamento semelhante
à forma de raciocínio humano, que toma decisões baseado em informações já
conhecidas, porém imprecisas.
Sistemas lineares, que possuem variações nas saídas proporcionais às
variações nas entradas, podem ser controlados facilmente através de sistemas de
controle baseados em modelagem matemática, no entanto, os sistemas não lineares
apresentam uma maior complexidade de controle devido a fatores como valores
imprecisos de parâmetros, dimensão e complexidade do modelo elevadas,
fenômenos físicos não compreendidos ou de pobre compreensão e distúrbios e
perturbações externas não mensuráveis.
A aplicação de controladores baseados em lógica fuzzy em sistemas não
lineares apresenta desempenho superior com relação aos controladores baseados
em modelagem matemática, pois permitem que sejam inseridas variáveis linguísticas
que são mais rápidas e fáceis de manipular.
Sendo assim, podemos descrever as características da lógica fuzzy da
seguinte maneira:
• A lógica fuzzy é capaz de trabalhar com múltiplos valores, fazendo com
que a verdade numérica seja apenas uma questão de ponto de vista;
• Através da lógica fuzzy é possível trabalhar com incertezas, onde a
certeza absoluta é demonstrada através dos valores 0 ou 1;
• A lógica fuzzy possibilita que computadores trabalhem com variáveis
linguísticas traduzidas em grupos numéricos;](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-48-2048.jpg)
![48
• Através da lógica fuzzy é possível manusear facilmente expressões
verbais carregadas de incertezas tais como claro, talvez, alto, baixo,
quente, frio, rápido, devagar, grande, pequeno e etc;
De forma geral, a lógica fuzzy opera transformando valores em variáveis
linguísticas, acessando uma base de regras através do peso ou valor da variável
linguística, tomando uma decisão com base nas regras predeterminadas e emitindo
um valor defuzzificado, sendo composta das seguintes etapas:
• Fuzzificação dos dados de entrada;
• Base de conhecimento ou base de regras;
• Lógica de tomada de decisões;
• Defuzzificação.
Para termos uma melhor compreensão do fluxo de funcionamento desta
lógica iremos expor os componentes de cada etapa de forma sequencial.
3.4.1 Teoria de Conjuntos Fuzzy
Dentro da teoria de conjuntos fuzzy desenvolvida por Zadeh (1965) é tido
como base a pertinência de um elemento x em um conjunto A, sendo a pertinência
representada matematicamente através do símbolo ∈:
x ∈A (3.4.1)
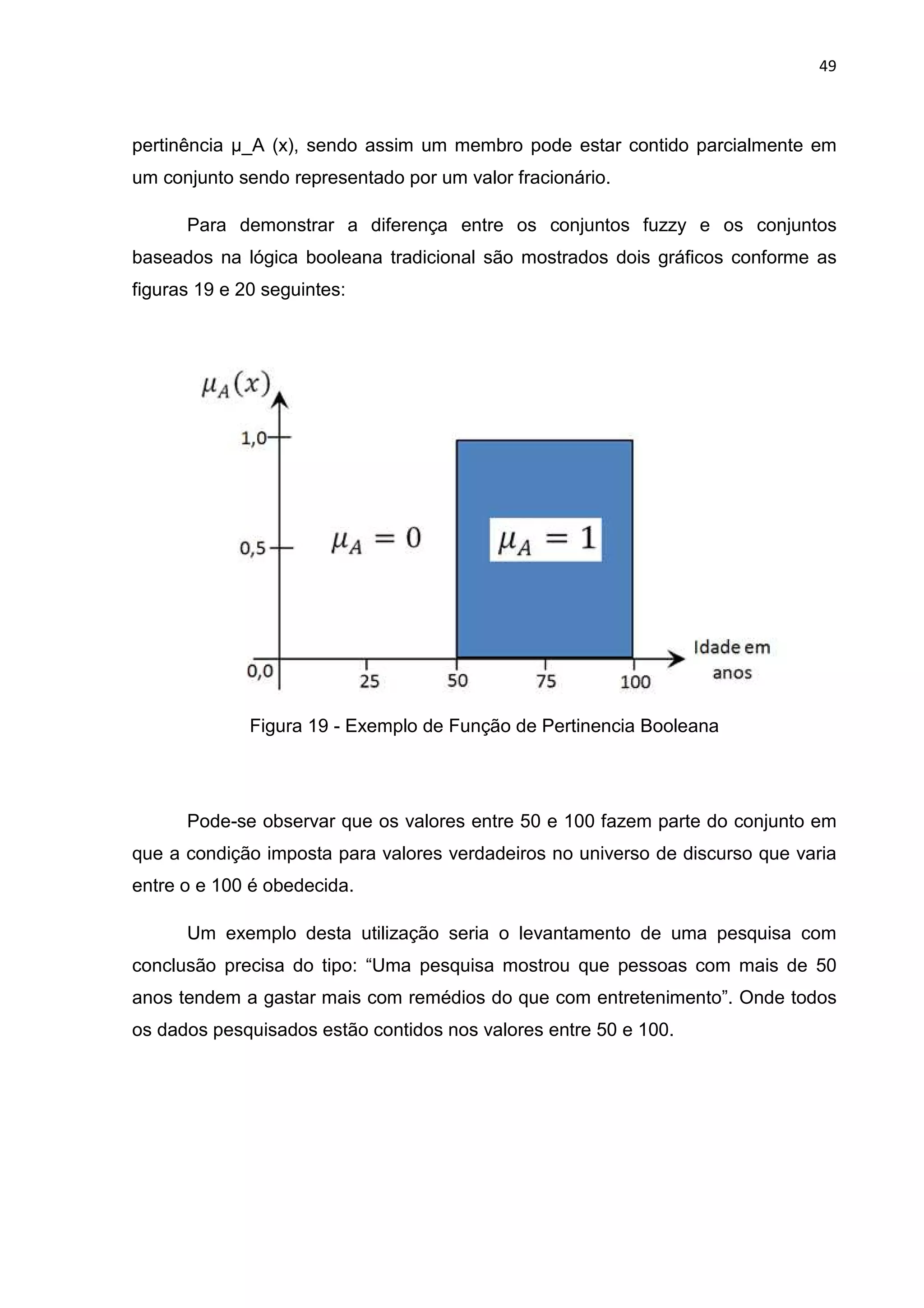
Com base na pertinência de um elemento em um conjunto é demonstrada a
função de pertinência através de µ_A (x). Simões e Shaw (2007) descrevem que
todos os valores dentro de um intervalo [0,1] estão contidos em uma função de](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-49-2048.jpg)




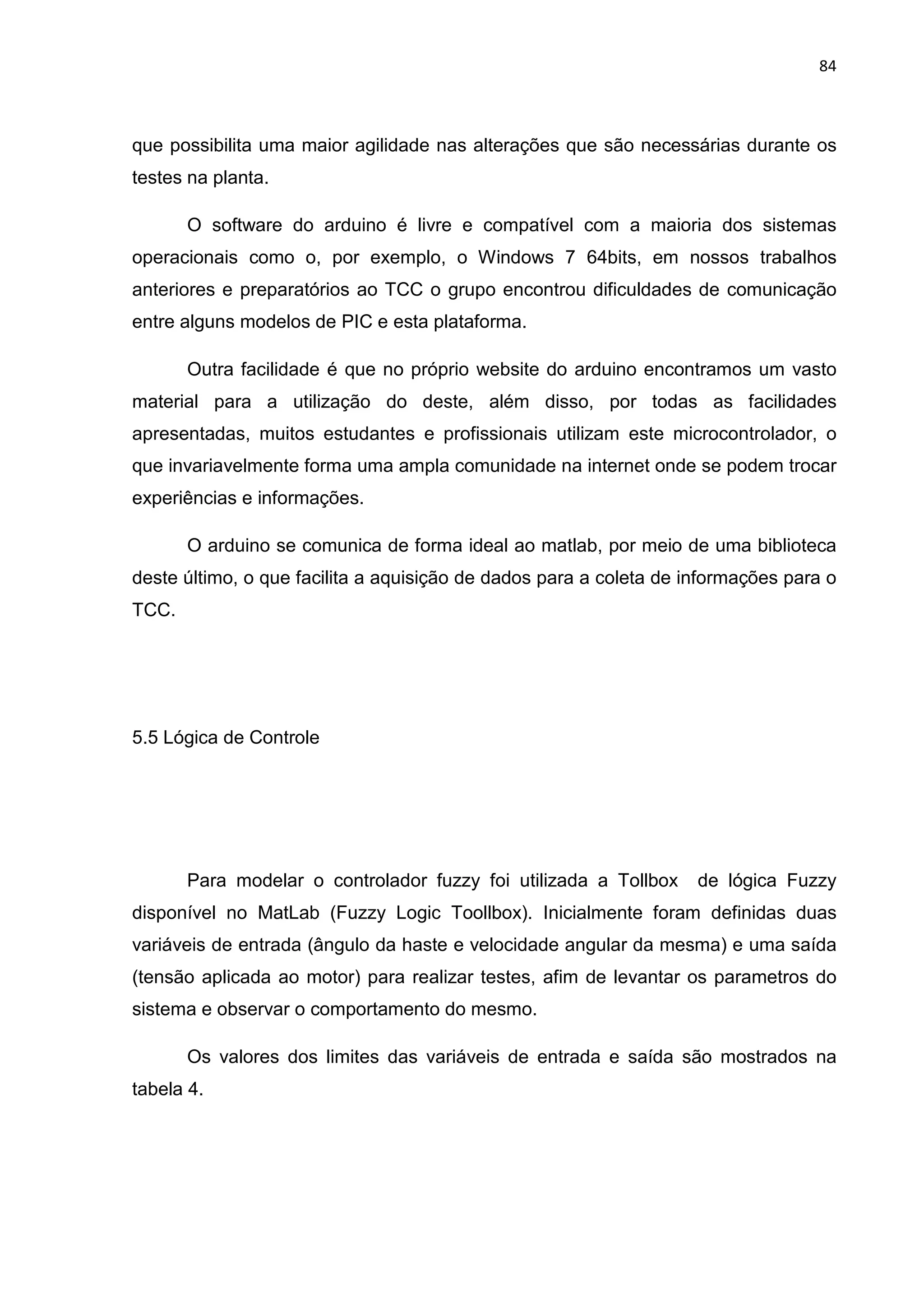
![85
Tabela 4 - Parâmetros das Variáveis de Entrada e Saída.
Os valores dos limites foram definidos de forma empírica por Dietrich (2008)
através de simulações e conhecimento de fenômenos físicos. Para o nosso estudo,
no entanto, o valor dos limites da saída diferem devido as especificações do motor
utilizado serem diferentes.
O ângulo da haste foi tido como aceito em -45º e 45º, que convertidos em
radianos resultam em -0.8 e 0.8 rad. A velocidade admitida após as simulações
variam entre -2 rad/s e 2 rad/s.
Foram definidas 7 funções de pertinência para cada variável sendo 5
triangulares e 2 trapezoidais, visando abranger todas as possíveis variações do
sistema. Segundo Simões e Shaw (2007), a precisão do controlador aumenta
conforme o número de funções de pertinencia porem, atraves de experiencias
realizadas, não há aumento significativo na precisão para valores maiores do que 7.
Afim de facilitar a montagem das funções de pertinencia no software foi criado um
quadro com as regras, conforme segue abaixo
Tabela 5 - Base de regras do sistema para duas variáveis
Variáveis Descrição das Variáveis Limites
Entradas
Angulo da Haste (rad) [-0.8 0.8]
Velocidade Angular (rad/s) [-2 2]
Saída Tensão aplicada ao Motor (V) [-12 12]
ωθ NG NM NB Z PB PM PG
NG PG PG PM PG NB NB NB
NM PG PM PM PM NB NB NM
NB PM PM PM PB NM NM NG
Z PG PM PB Z NB NB NG
PB PG PM PM NB NM NM NM
PM PM PB PB NM NM NM NG
PG PB PB PB NG NM NM NG](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-86-2048.jpg)

![120
8 REFERÊNCIAS BIBLIOGRÁFICAS
BELL, A. E. Christian Huygens and The development of Science int he
Seventh Century. [S. I.], [s. d.]. Disponível em: http://ia600502.us.archive.org
BELUSSO, C. L. M.; FÉLIX, J. L. P. Dinâmica Caótica de Um Sistema
Pêndulo Invertido com Suspensão Veicular. [S. I.], 1999. Disponível em:
http://www.sbmac.org.br/eventos/cnmac/xxxiii_cnmac/pdf/568.pdf. Acesso em: 03
mar, 2013.
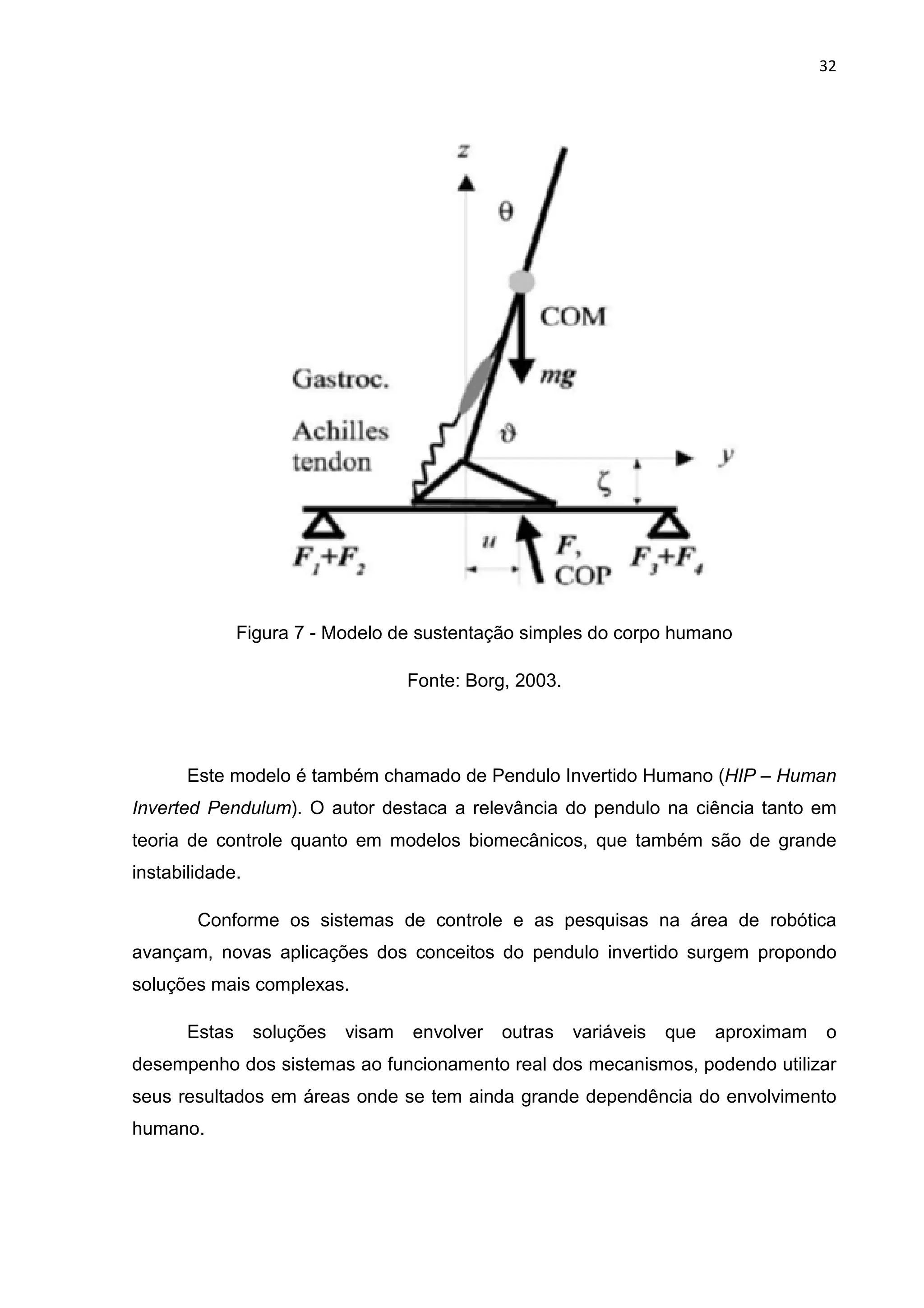
BORG, F. G. An Inverted Pendulum with Springly Control As A Model Of
Human Standing. Jyväskylä, 2003. Disponível em: http://arxiv.org/
abs/physics/0512122. Acesso em: 16 mar, 2013.
BOULOS, P. Newton’s Path to Universal Gravitation: The Role of the
Pendulum. [S. I.], 2005. Disponível em: http://link.springer.com/
article/10.1007/s11191-005-1790-5. Acesso em: 05 mai, 2013.
CAMPA, G. Matlab Support Package For Arduíno. [S. I.], 2012 Disponível
em http://www.mathworks.com/matlabcentral/fileexchange/27843. Acesso em: 06
set,2013.
DELEY, D. W. Controlling an Inverted Pendulum. An Example of a Digital
Feedback Control System. [S. I.], [s. d.]. Disponível em:http://www.
daviddeley.com/pendulum/synopsis.htm. Acesso em: 16 mar, 2013.
DORF, R. C.; BISHOP, R. H. Sistemas de Controle Modernos. 11 ed. Rio
de Janeiro: LTC, 2009.
FOUCAULT, L.; GARIEL, C. M. LISSAJOUS, J. A. Recueil des travaux
scientifiques de Léon Foucault 1878. [S. I.], 1878. Disponível em:
http://archive.org/details/recueildestrava00lissgoog. Acesso em: 05 mai, 2013.
GALILEI, G. Dialogues Concerning Two New Sciences. [S. I.], 1638.
Disponível em: http://www.dominiopublico.gov.br/pesquisa/Detalhe
ObraForm.do?select_action=&co_obra=3933. Acesso em: 04 mai, 2013.](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-121-2048.jpg)
![121
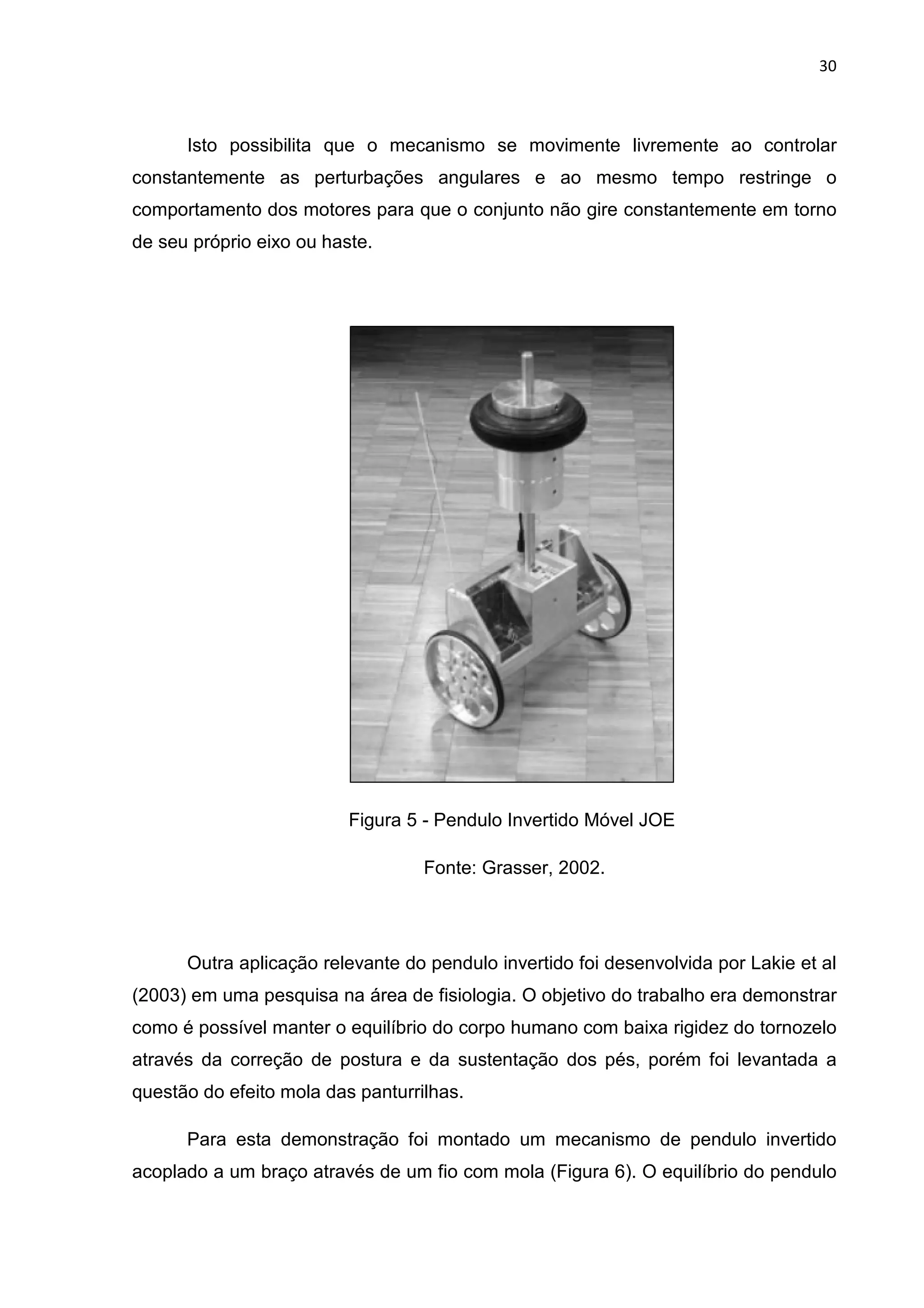
GRASSER, F. et al. JOE, A Mobile Inverted Pendulum. [S. I.], 2002.
Disponível em: http://www.cec.uchile.cl/~lemoreno/segway/Memoria/
grasser_darrigo_colombi_rufer_ieee_02.pdf. Acesso em: 16 mar, 2013.
HUYGENS, C. Horologium Oscillatorium. [S. I.], 1656. Disponível em:
http://www.17centurymaths.com/contents/huygenscontents.html. Acesso em: 05 mai,
2013.
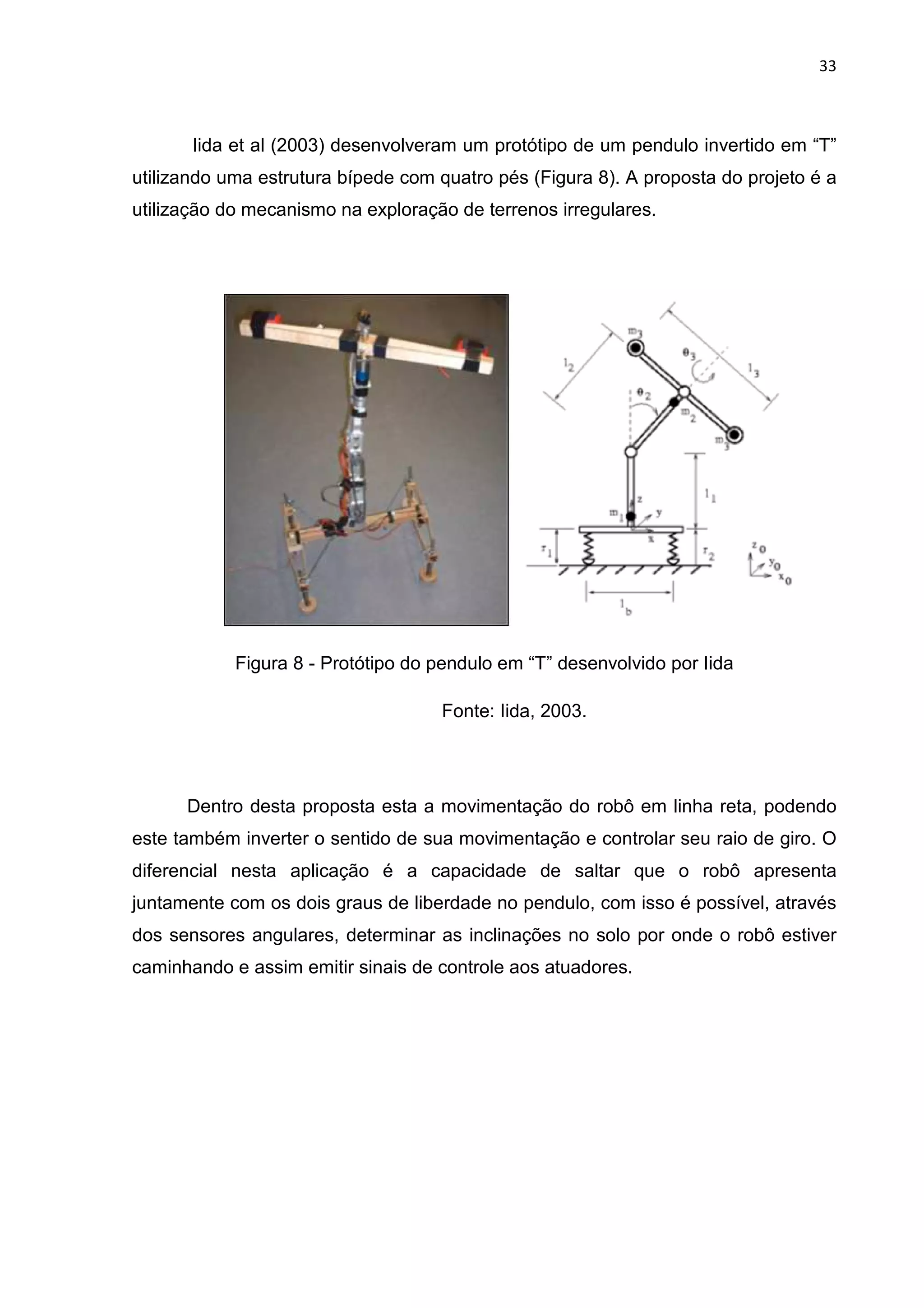
IIDA, F. DRAVID, R. PAUL, C. Design and Control of a Pendulum Driven
Hopping Robot. [S. I.], [s. d.]. Disponível em: http://people.csail.mit.edu/
iida/papers/stumpyIROS02.pdf. Acesso em: 16 mar, 2013.
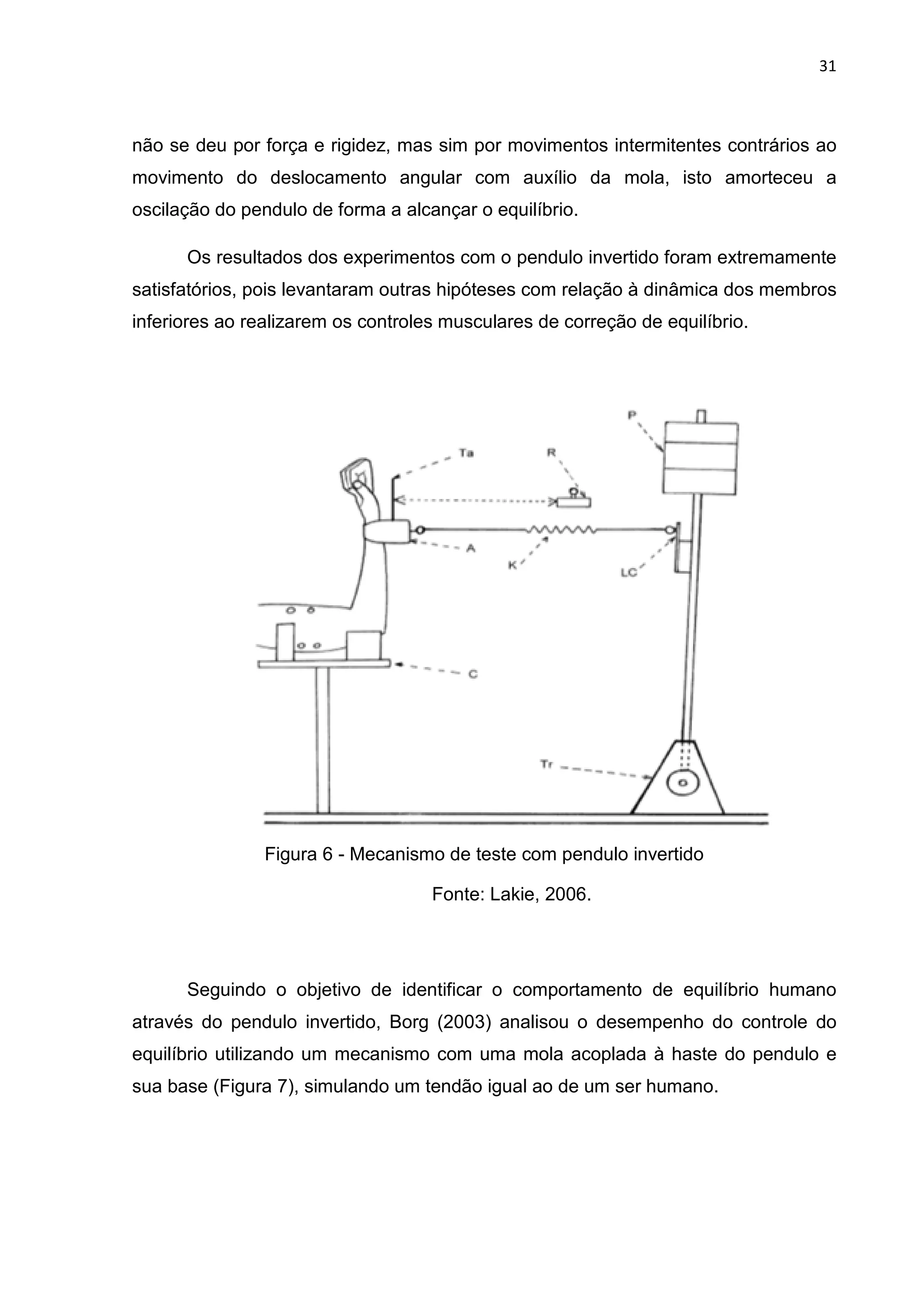
LAKIE, M.; CAPLAN, N.; LORAM, I. D. Human balancing of an inverted
pendulum with a compliant linkage: neural control by anticipatory intermittent
bias. Pennsylvania, 2002. Disponível em:
http://www.ncbi.nlm.nih.gov/pmc/articles/PMC2343154/pdf/tjp0551-0357.pdf+M46.
Acesso em: 16 mar, 2013.
LEMOS, M. Biblioteca Fuzzy eFLL. [S. I.], [S.D.], Diponivel em:
http://zerokol.com/product/51e93616e84c5571b7000018/1/pt-BR. Acesso em: 15
ago,2013
NISE, N. S. Engenharia de Sistemas de Controle. 5 ed. Rio de Janeiro:
LTC, 2011.
OGATA, K. Engenharia de Controle Moderno. 5 ed. São Paulo: Pearson
Prentice Hall, 2010.
PARSEGHIAN, A. S. Control of a Simulated, Three Dimensional Bipedal
Robot to Initiate Walking, Continue Walking, Rock Side-to-Side and Balance.
Massachusetts, 2000. Disponível em: http://citeseerx.ist.psu.edu/viewdoc/
summary?doi=10.1.1.23.3602. Acesso em: 16 mar, 2013.
RIBEIRO, R. Implementação de um Sistema de Controle de Um Pendulo
Invertido. Itajubá, 2007. Disponível em: http://www.joinville.udesc.br/portal/
professores/farias/materiais/Controle_de_um_Pendulo_Invertido.pdf. Acesso em: 03
mar, 2013.](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-122-2048.jpg)
![122
ROSÁRIO, J. M. Princípios de Mecatrônica. São Paulo: Prentice Hall, 2005.
SILVA, E. M.; ANTUNES, R. Controle de em Pendulo Invertido. Rio de
Janeiro, 2010. Disponível em: http://www.lee.eng.uerj.br/~elaine/pend.pdf. Acesso
em: 03 mar, 2013.
SILVA, M. A. O. Estudo de Técnicas de Controle Aplicada ao Sistema
Pendulo Invertido. Disponível em: http://www.em.ufop.br/cecau/monografias/2009/
MOZZER%20ANTONIO%20DE%20OLIVEIRA%20SILVA.pdf. Acesso em: 03 mar,
2013.
SIMÕES, M. G.; SHAW, I. S. Controle e Modelagem Fuzzy. 2 ed. São Paulo:
Blucher, 2007.
SOUZA, D. J. Desbravando o PIC: Ampliado e Atualizado para
PIC16F628A. 12 ed. São Paulo: Érica, 2008.
STOKES, G. On the Motion of Pendulums, Transactions of the Cambridge
Philosophical Society IX. [S. I.], 1851. Disponível em: http://ia700301.
us.archive.org/2/items/transactionsofca09camb/transactionsofca09camb.pdf. Acesso
em: 05 mai, 2013.
VASCONCELOS, V. B. et. al. Controle de um sistema pendulo invertido
usando controladores inteligentes. 2012. Disponível em:
http://www.cobenge.edu.br/artigos/pdfcduspiuci.pdf. Acesso em: 05 mai, 2013.
ZAYAS, H. Earthquake Protection Systems, Inc.; Technical
Characteristics of Friction Pendulum. 1985. Disponível em:
http://www.earthquakeprotection.gov/pmc/articles/PMC2343154/pdf/tjp0551-
0357.pdf+M46. Acesso em: 16 mar, 2013.](https://image.slidesharecdn.com/penduloinvertidocomlgicafuzzy-unipmarques2013-151104184007-lva1-app6891/75/Pendulo-invertido-com-logica-Fuzzy-123-2048.jpg)