Baixado 22 vezes
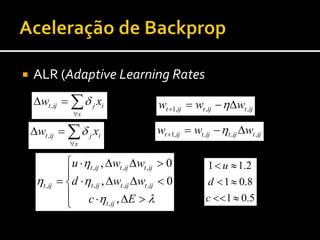

Este documento discute vários métodos para acelerar e melhorar a aprendizagem automática, incluindo usar pequenas populações iniciais, mutação em vez de cruzamento, conhecimento específico do problema, reprocessamento retrospectivo de experiências, shaping, boosting, bagging e taxas de aprendizagem adaptativas. Referências relevantes são fornecidas.


















![[DTC21] Raphael Castilho - Começando com Inteligência Artificial e Machine Le...](https://cdn.slidesharecdn.com/ss_thumbnails/iaemachine-210317154040-thumbnail.jpg?width=640&height=640&fit=bounds)








