Baixar para ler offline

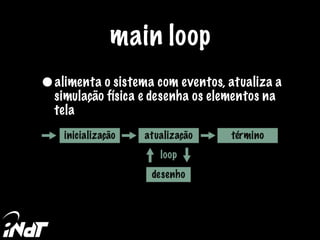
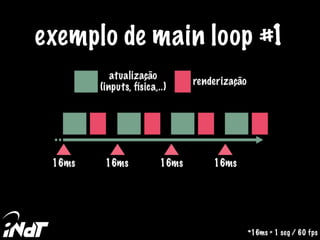
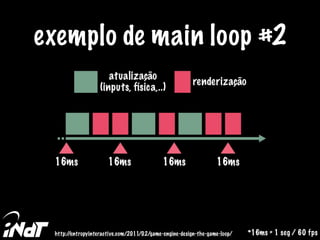
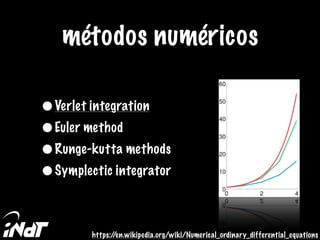
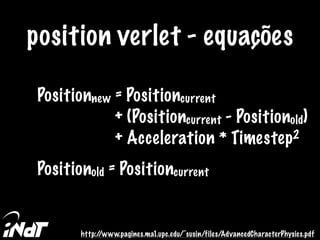
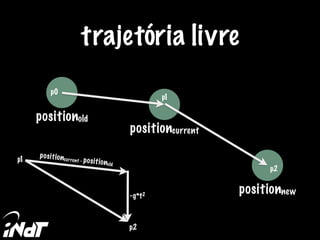
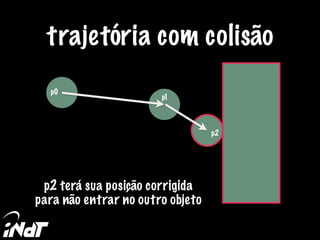
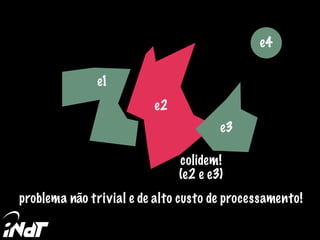
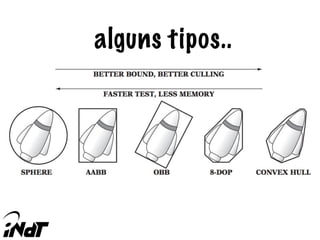
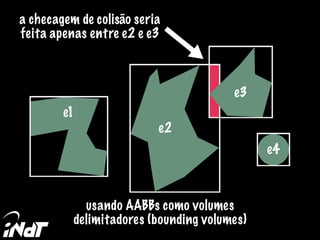
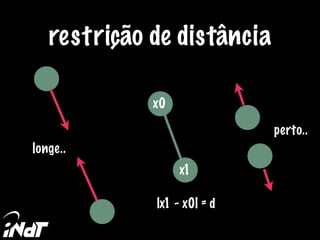
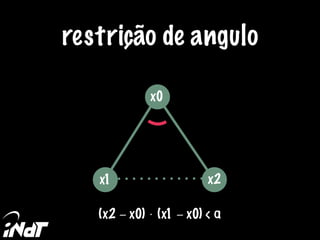
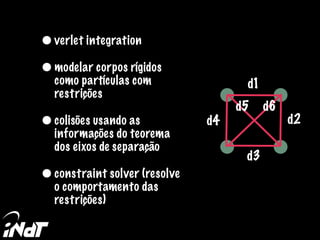

Este documento discute o que é uma engine de física, explicando que ela simula sistemas físicos como dinâmica de corpos rígidos e fluidos através de representações gráficas e geométricas. Também aborda tópicos como integração numérica para movimentar objetos, detecção de colisões usando volumes delimitadores, resolução de colisões com restrições e exemplos de main loops para simulações físicas.








































