O microprocessador, geralmentechamado
apenas de processador, é um circuito
integrado que realiza as funções de cálculo
e tomada de decisão de um computador.
Todos os computadores e equipamentos
eletrônicos baseiam-se nele para executar
suas funções, podemos dizer que o
processador é o cérebro do computador por
realizar todas estas funções.
Microprocessador
O microprocessador é um um chip de CPU (Unidade Central de
Processamento) independente, responsável por executar operações
lógicas e matemáticas em um computador.
Dessa maneira, a principal função de um microprocessador é executar uma sequência de
instruções armazenadas, em um processo conhecido como ciclo de instrução
O microcontrolador consisteem um único
circuito integrado que reúne um núcleo de
processador, memórias voláteis e não voláteis e
diversos periféricos de entrada e de saída de
dados. Ou seja, ele nada mais é do que um
computador muito pequeno capaz de realizar
determinadas tarefas de maneira eficaz e sob
um tamanho altamente compacto.
Microcontrolador
A importância dos microcontroladores reside basicamente na alta demanda por
sistemas embarcados do mercado atual. Isto é, sistemas computacionais
compactos e de custo acessível que atendem a uma demanda específica.
5.
Microcontroladores e oaumento na integração dos circuitos
Dois fatores principais para a transformação que ocorreu em toda a indústria de produtos eletrônicos:
a crescente miniaturização de componentes eletrônicos.
a transição progressiva das funções de dispositivo de implementação em hardware para
implementação em software executado em microcontroladores, os firmwares.
6.
A história dainvenção dos microcontroladores
Na década de 70:
Intel
A Intel estava trabalhando na
invenção do primeiro
microprocessador do mundo.
Gary Boone, da Texas
Instruments (TI)
Ele projetou um único chip de
circuito integrado que poderia
conter quase todos os
circuitos essenciais para
formar uma calculadora.
7.
O microcontrolador anteao microprocessador
A popularização do microcontrolador em várias aplicações derivou do crescimento dos microprocessadores.
A maioria dos produtos
eletrônicos ainda era
construída usando circuitos
combinacionais lógicos
extremamente inteligentes,
implementados com uma
enorme quantidade de
chips.
Até meados da década
de 1980
Uma minoria de fabricantes
começou a incorporar
microprocessadores em
seus produtos para reduzir
a contagem de chips.
A partir do início da
década de 1980
As técnicas aprimoradas de
processamento de silício e
fabricação de chips
resultaram na capacidade
de colocar cada vez mais
circuitos em um chip.
Na década de 1990
8.
Termos frequentemente usados
Algunstermos do campo de sistemas embarcados:
microprocessador controlador de sinal misto
sistema embarcado ou
embutido
sistema de tempo real processador embutido processador de sinal digital
(DSP)
9.
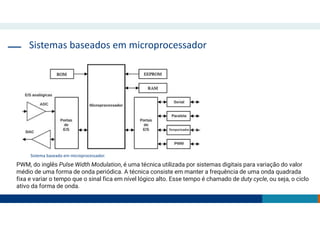
Sistemas baseados emmicroprocessador
Sistema baseado em microprocessador.
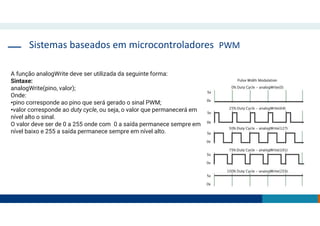
PWM, do inglês Pulse Width Modulation, é uma técnica utilizada por sistemas digitais para variação do valor
médio de uma forma de onda periódica. A técnica consiste em manter a frequência de uma onda quadrada
fixa e variar o tempo que o sinal fica em nível lógico alto. Esse tempo é chamado de duty cycle, ou seja, o ciclo
ativo da forma de onda.
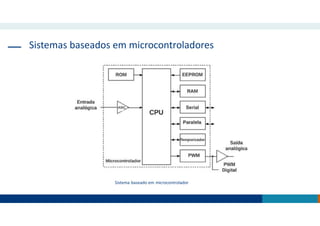
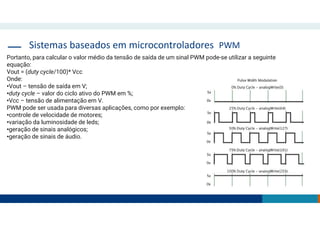
Sistemas baseados emmicrocontroladores PWM
Portanto, para calcular o valor médio da tensão de saída de um sinal PWM pode-se utilizar a seguinte
equação:
Vout = (duty cycle/100)* Vcc
Onde:
•Vout – tensão de saída em V;
•duty cycle – valor do ciclo ativo do PWM em %;
•Vcc – tensão de alimentação em V.
PWM pode ser usada para diversas aplicações, como por exemplo:
•controle de velocidade de motores;
•variação da luminosidade de leds;
•geração de sinais analógicos;
•geração de sinais de áudio.
12.
A função analogWritedeve ser utilizada da seguinte forma:
Sintaxe:
analogWrite(pino, valor);
Onde:
•pino corresponde ao pino que será gerado o sinal PWM;
•valor corresponde ao duty cycle, ou seja, o valor que permanecerá em
nível alto o sinal.
O valor deve ser de 0 a 255 onde com 0 a saída permanece sempre em
nível baixo e 255 a saída permanece sempre em nível alto.
Sistemas baseados em microcontroladores PWM
13.
Arquitetura básica demicrocontroladores
CPU
• É responsável por executar o programa armazenado e gerenciar os
periféricos.
• Os registradores da CPU são como áreas de armazenamento da
memória interna.
• A unidade lógica aritmética é responsável por realizar os cálculos.
• O trabalho do decodificador de instruções é traduzir opcodes
numéricos em sequências de ações.
• O barramento de endereços tem como objetivo selecionar qual dos
dispositivos externos (ou locais de memória) tem permissão para usar o
barramento de dados.
Ícone relacionado ao chip do processador
Arquitetura básica demicrocontroladores
Memórias
Tanto a ROM quanto a RAM consistem em conjuntos de locais de armazenamento, geralmente organizados em
bytes ou múltiplos de bytes em algum tipo de módulo, como um chip.
RAM
É usada para armazenar
valores que podem mudar
durante a execução de um
programa.
É volátil, ou seja, o seu
conteúdo é perdido toda vez
que os sistemas são
desligados.
ROM
Não perde seu conteúdo
quando a alimentação é
removida.
16.
Arquitetura básica demicrocontroladores
E/S digital paralela
Existem muitos tipos diferentes de porta, a mais simples é a porta de entrada e saída (E/S) paralela.
Essas portas podem ser vistas como células de memória ou registradores, que são conectados ao
núcleo da CPU usando o barramento de dados e ao mundo externo por meio de pinos do
microcontrolador.
Microcontroladores enviam e recebem informações para o mundo exterior usando portas.
17.
Arquitetura básica demicrocontroladores
E/S serial
• As comunicações seriais exigem que o remetente envie dados de 1 bit por vez, a uma taxa acordada com o
receptor pretendido.
• Cada bit recebe um “intervalo de tempo”, que define o fio/trilha de transmissão para o nível lógico correto
para cada intervalo de tempo do bit.
• O receptor mede a voltagem que chega do emissor no meio de cada intervalo de tempo de bit.
• A operação confiável requer um tempo preciso. O receptor deve olhar os tempos corretos para cada bit.
• Existem duas maneiras comuns de se conseguir isso: transmissão assíncrona e transmissão síncrona.
18.
Arquitetura básica demicrocontroladores
Temporizadores
São normalmente construídos usando uma fonte de clock e um registrador específico com função de
contador.
Os contadores contam os períodos de clock que são inseridos neles.
19.
Arquitetura básica demicrocontroladores
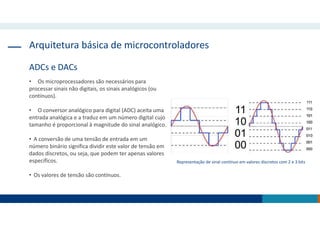
ADCs e DACs
• Os microprocessadores são necessários para
processar sinais não digitais, os sinais analógicos (ou
contínuos).
• O conversor analógico para digital (ADC) aceita uma
entrada analógica e a traduz em um número digital cujo
tamanho é proporcional à magnitude do sinal analógico.
• A conversão de uma tensão de entrada em um
número binário significa dividir este valor de tensão em
dados discretos, ou seja, que podem ter apenas valores
específicos.
• Os valores de tensão são contínuos.
Representação de sinal contínuo em valores discretos com 2 e 3 bits
20.
Arquitetura básica demicrocontroladores
ADCs e DACs
Eles aceitam um sinal de entrada digital e emitem um sinal analógico proporcional.
Se uma saída analógica for necessária para um microcontrolador sem um DAC interno, um IC externo
e um circuito de suporte devem ser adicionados.
Os conversores digitais para analógico (DACs) executam o inverso dos ADCs.
21.
Arquitetura básica demicrocontroladores
Controle de interrupções
As interrupções são sinais
que fazem com que a CPU
suspenda sua atividade atual
e execute outra tarefa.
Os sinais de interrupção
frequentemente são
produzidos por dispositivos de
hardware que requerem
atenção urgente.
Interrupções possibilitam
retirar alguns
microcontroladores de um
estado de baixo consumo de
energia, permitindo que este
esteja sempre disponível
mesmo mantendo boa parte
de seus circuitos desligados.
22.
Como funciona opipelining?
O projeto arquitetônico da CPU pode ser dividido em duas:
RISC ‒ Reduced Instruction Set
Computing
Nestas arquiteturas, os conjuntos
de instruções são modestos e
simples, o que ajuda a
compreender comandos mais
complexos.
O pipelining (tunelamento) é uma
técnica crucial usada para acelerar
máquinas RISC.
CISC ‒ Complex Instruction Set
Computer
Tem a capacidade de realizar
operações de várias etapas ou
modos de endereçamento dentro
de um conjunto de instruções.
Computação de conjunto de
instruções reduzido - RISC
Computação de conjunto de
instruções complexas - CISC
23.
Como funciona opipelining?
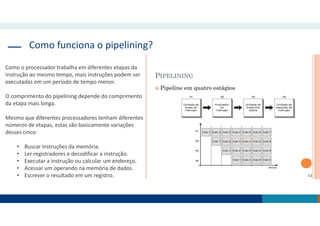
Como o processador trabalha em diferentes etapas da
instrução ao mesmo tempo, mais instruções podem ser
executadas em um período de tempo menor.
O comprimento do pipelining depende do comprimento
da etapa mais longa.
Mesmo que diferentes processadores tenham diferentes
números de etapas, estas são basicamente variações
desses cinco:
• Buscar instruções da memória.
• Ler registradores e decodificar a instrução.
• Executar a instrução ou calcular um endereço.
• Acessar um operando na memória de dados.
• Escrever o resultado em um registro.
24.
RISC versus CISC
Multiplicandodois números na memória
Em um sistema computacional genérico, a memória principal é dividida em locais numerados.
A unidade de execução de cálculo, uma unidade lógica e aritmética, só pode operar com os dados
que foram carregados em um dos seus registradores internos.
25.
RISC versus CISC
Aabordagem CISC
• O seu objetivo principal é completar uma tarefa com o mínimo de linhas de instrução possível.
• Isso é conseguido construindo um hardware de processador que é capaz de compreender e executar uma
série de operações.
• Para esta tarefa em particular, um processador CISC poderia ser preparado com uma instrução específica
(chamada "MULT").
26.
RISC versus CISC
Aabordagem CISC
Exemplo: Encontrar o produto de dois números ‒ um armazenado no local 21 e outro armazenado no local 49 da
memória ‒ e então armazenar o produto de volta no local 21.
Quando executada, a instrução MULT :
• carrega os dois valores em registros separados;
• multiplica os operandos na unidade de execução;
• armazena o produto na posição de memória indicada (21).
27.
RISC versus CISC
Aabordagem RISC
Usam apenas instruções simples que podem ser executadas em um ciclo de clock.
O comando "MULT" pode ser dividido em três comandos separados:
LOAD
Move os dados do banco de
memória para um registrador.
PROD
Encontra o produto de dois
operandos localizados dentro
dos registradores.
STORE
Move os dados de um
registrador para os bancos de
memória.
28.
RISC versus CISC
Aabordagem RISC
Exemplo: Para executar a série exata de etapas descritas na abordagem CISC, um programador precisaria codificar
quatro linhas de montagem:
29.
RISC ou CISC?
•A escolha da maioria dos fabricantes hoje recai nos
modelos RISC.
• Existe uma tendência histórica que mantém o
computador pessoal como CISC.
• Hoje, o Intel x86 é o único chip que mantém a
arquitetura CISC.
• O microcontrolador ainda utilizado em algumas áreas,
o 8051, é de arquitetura CISC.
Microprocessador RISC.
30.
Sugestões: Proposta deProjetos Extensionistas
1.Sistema de Monitoramento Remoto: Use um microcontrolador para coletar dados de sensores (como temperatura,
umidade, luminosidade) e envie esses dados para um servidor remoto ou aplicativo móvel para monitoramento em tempo
real.
2.Automação Residencial: Crie um sistema de automação residencial para controlar luzes, temperatura, persianas, etc.,
usando um microcontrolador. Você pode integrar sensores de movimento, luz e temperatura para tornar o sistema mais
inteligente.
3.Robôs e Veículos Autônomos: Desenvolva um robô ou veículo autônomo usando um microcontrolador como o cérebro.
Você pode adicionar sensores como ultrassônico, infravermelho ou câmeras para permitir que ele evite obstáculos e navegue
de forma autônoma.
4.Sistemas de Segurança: Construa um sistema de segurança residencial ou empresarial utilizando um microcontrolador para
controlar câmeras, sensores de movimento, sistemas de alarme, e até mesmo sistemas de fechaduras inteligentes.
5.Controle de Dispositivos por Voz: Integre um microcontrolador com assistentes de voz como Amazon Alexa ou Google
Assistant para controlar dispositivos domésticos por comando de voz.
6.Estação Meteorológica: Construa uma estação meteorológica que colete dados como temperatura, umidade, pressão
atmosférica e velocidade do vento, e exiba esses dados em um display ou envie para um aplicativo de smartphone.
7.Brinquedos Inteligentes: Desenvolva brinquedos interativos e educativos que respondam a estímulos do usuário, como
movimento, som ou luz.
8.Sistemas de Irrigação Automatizados: Crie um sistema de irrigação automatizado para jardins ou plantações, que controle a
quantidade de água com base em sensores de umidade do solo e previsões meteorológicas.
9.Relógio Digital Personalizado: Projete e construa um relógio digital personalizado com um display de LED ou LCD e recursos
adicionais como alarme, cronômetro, e até mesmo previsão do tempo se conectar com a internet.
31.
Plano de Projeto
Sumário
1.DIAGNÓSTICO E TEORIZAÇÃO
1.1. Identificação das partes interessadas e parceiros
1.2. Problemática e/ou problemas identificados
1.3. Justificativa
1.4. Objetivos/resultados/efeitos a serem alcançados (em
relação ao problema identificado e sob a perspectiva dos
públicos envolvidos)
1.5. Referencial teórico (subsídio teórico para propositura de
ações da extensão)
2. PLANEJAMENTO E DESENVOLVIMENTO DO PROJETO
2.1. Plano de trabalho (usando ferramenta acordada com o
docente)
2.2.Descrição da forma de envolvimento do público participante
na formulação do projeto, seu desenvolvimento e avaliação,
bem como as estratégias pelo grupo para mobilizá-los.
2.3.Grupo de trabalho (descrição da responsabilidade de cada
membro)
2.4. Metas, critérios ou indicadores de avaliação do projeto
2.5. Recursos previstos
2.6. Detalhamento técnico do projeto
3. ENCERRAMENTO DO PROJETO
3.1. Relatório Coletivo (podendo ser oral e escrita ou apenas
escrita)
3.2. Avaliação de reação da parte interessada
3.3. Relato de Experiência Individual
3.1. CONTEXTUALIZAÇÃO
3.2. METODOLOGIA
3.3. RESULTADOS E DISCUSSÃO:
3.4. REFLEXÃO APROFUNDADA
3.5. CONSIDERAÇÕES FINAIS
32.
Entrega na PróximaAula - Rascunho
1. DIAGNÓSTICO E TEORIZAÇÃO
1.1 Identificação das partes interessadas e parceiros
Descrever as partes interessadas no projeto (perfil socioeconômico, escolaridade, gênero, faixa etária, quantidade estimada de
participantes, outras informações), inclusive citando parceiros, se houver. Nesta etapa é importante demonstrar quem são os
participantes para justificar a pertinência social do projeto. Incluir evidências (ex: termo de acordo de cooperação) do acordo entre as
partes interessadas.
1.2 Problemática e/ou problemas identificados
Descrever a (s) problemática (s) identificada (s) e a escolhida/priorizada que motiva a elaboração do projeto de extensão. Nesta etapa
deve-se demonstrar de maneira clara o problema e/ou situação-problema que demandou a elaboração do projeto de extensão. Elucidar
também que a demanda sociocomunitária foi identificada, a partir de encontros/conversas/trocas/escuta da comunidade onde o projeto
será desenvolvido.
1.3 Justificativa
Descrever como a questão identificada (1.2 – problemática escolhida) é pertinente academicamente, uma vez que a aprendizagem
baseada em projetos consiste na produção e aplicação de conhecimentos com vistas à resolução de demandas reais. Importante destacar
a relação com o curso (objetivos de formação/aprendizagens), bem como as motivações do grupo de trabalho.