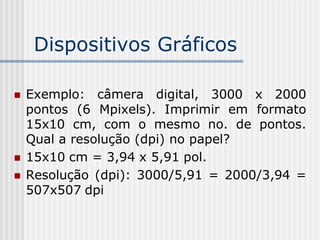
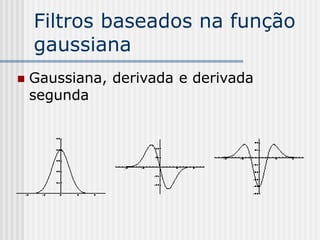
Transferir como PDF, PPTX








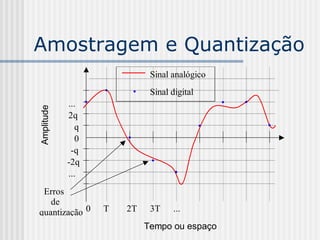
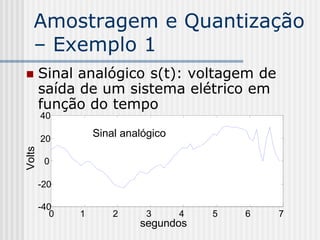
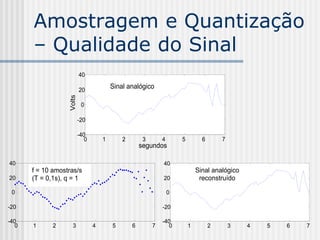
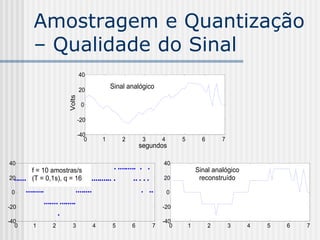
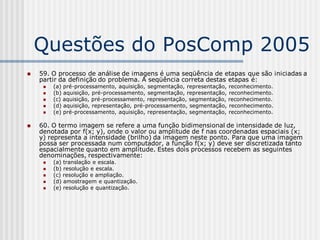
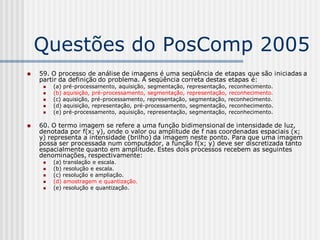
![Amostragem e Quantização
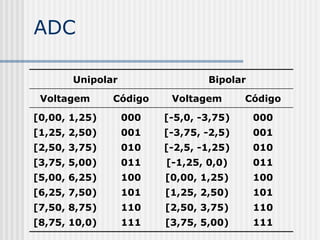
- Parâmetros
T: período de amostragem (unidade de
espaço ou tempo)
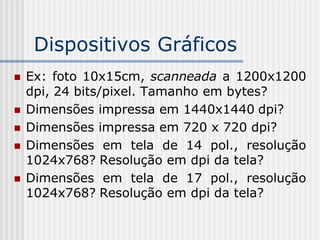
f = 1/T: freqüência de amostragem
(amostras/unidade de espaço ou tempo)
q: passo de quantização
Sinal analógico: s(t), s(x)
Sinal digitalizado: s[nT], n inteiro não
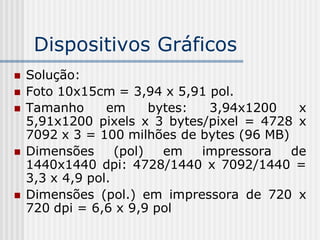
negativo, s[nT] {-Mq, ..., -2q, -q, 0, q,
2q, ..., (M-1)q}](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-68-320.jpg)
![Amostragem e Quantização
– Exemplo 1
T = 0.5s, q = 0.5V, M = 64: s[0.5.n], n =
0, 1, 2, ...
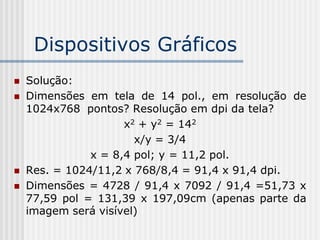
s[0.5n] {-32, -31.5..., -0.5, 0, 0.5
1,...,31, 31.5}
s[0]=9.5V,s[0.5]=8V,s[1]=-2V, s[1.5]=
-10.5V, ...
Notação Simplificada:
s[n] {-M,..., -2, -1, 0, 1, 2,..., M-1}
s[0]=19, s[1]=16, s[2]=-4, s[3]=-21,...
s[n] = {19, 16, -4, -21, ...}](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-70-320.jpg)
![Amostragem e Quantização
– Exemplo 2
Em um processo de digitalização foram colhidas
N=10 amostras de um sinal de temperatura
(graus Celsius) igualmente espaçadas ao longo de
um segmento de reta unindo duas cidades A e B.
A primeira amostra foi colhida na cidade A e a
última na cidade B. O sinal digital resultante é
s[n] = {12 12 13 13 14 13 14 14 15 14}
Perguntas:
(a) Distância entre as cidades?
(b) Valores de temperatura registrados?
(c) Limites de temperatura registrável?
(d) Qual o valor de s[5km]?](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-71-320.jpg)
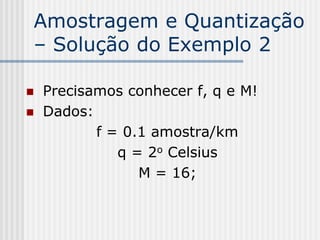
![Amostragem e Quantização
– Solução do Exemplo 2
T = 10 km/amostra
(a) Distância entre as cidades =
(10-1)x10 = 90km
(b) Temperaturas em graus Celsius:
{24 24 26 26 28 26 28 28 28 30}
(c) Limites de temperatura em graus
Celsius: [-32, 30]
(d) s[5km]: no sinal digital s[nT] não há
nT = 5km!](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-73-320.jpg)
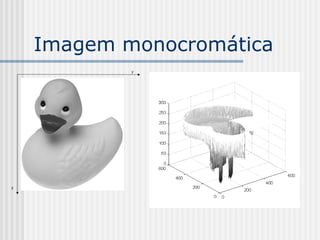
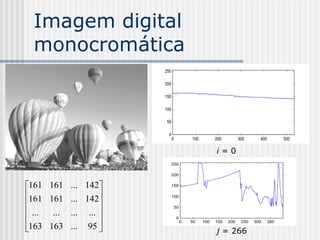
![Notação simplificada para
Imagens
f[i, j] {0, 1, 2,..., M-1}
Tipicamente, M = 256](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-82-320.jpg)



![Operações n-árias
Operação T sobre n imagens, f1, f2, ..., fn,
produzindo imagem de saída g
g = T[f1, f2, ..., fn]
Operações binárias: n = 2
Operações unárias ou filtros: n = 1
g = T[f]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-110-320.jpg)
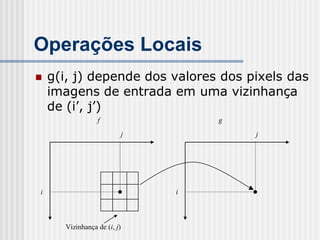
![Operações Locais
Exemplo: Filtro “Média”
1
g (i, j ) [ f (i 1, j 1) f (i 1, j ) f (i 1, j 1)
9
f (i, j 1) f (i, j ) f (i, j 1)
f (i 1, j 1) f (i 1, j ) f (i 1, j 1)]
Operação sobre pixels da imagem
original: resultado do filtro em um dado
pixel não altera o resultado em outros
pixels.
Primeira e última coluna/linha?](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-114-320.jpg)

![Filtros de aguçamento e
detecção de bordas
Efeito contrário ao de suavização: acentuam
variações de intensidade entre pixels
adjacentes.
Baseados no gradiente de funções
bidimensionais.
Gradiente de f(x, y):
f
x f
2 2 1 / 2
f
G[f(x, y)] = G[ f ( x, y )]
y
x
f
y ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-120-320.jpg)
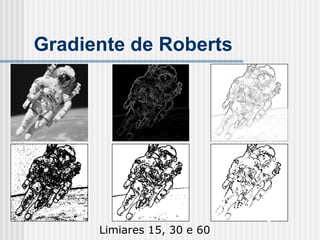
![Filtros de detecção de bordas
g(i, j): aproximação discreta do módulo do
vetor gradiente em f(i, j).
Aproximações usuais:
g(i, j) = {[f(i,j)-f(i+1,j)]2 + [f(i,j)-f(i,j+1)]2}1/2
g(i, j) = |f(i,j)-f(i+1,j)| + |f(i,j)-f(i,j+1)|
Gradiente de Roberts:
g(i,j) = {[f(i,j)-f(i+1,j+1)]2+[f(i+1,j)-f(i,j+1)]2}1/2
g(i, j) = |f(i,j)-f(i+1,j+1)| + |f(i+1,j)-f(i,j+1)|](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-121-320.jpg)

![Controle de contraste
adaptativo
c
(i, j ) [ f (i, j ) (i, j )]; (i, j ) 0
g (i, j ) (i, j )
f (i, j ); (i, j ) 0
](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-141-320.jpg)


![Filtros Lineares e Invariantes
ao Deslocamento
Filtro linear:
T [af1 + bf2] = aT [f1] + bT [f2]
para constantes arbitrárias a e b.
Filtro invariante ao deslocamento:
Se g[i, j] = T [f[i, j]]
então g[i - a, j – b] = T [f[i - a, j – b]].
Se i e j são coordenadas espaciais: filtros
espacialmente invariantes.](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-149-320.jpg)
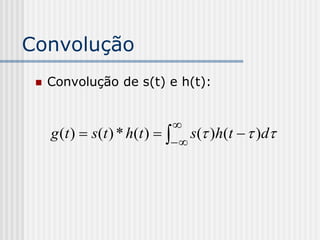
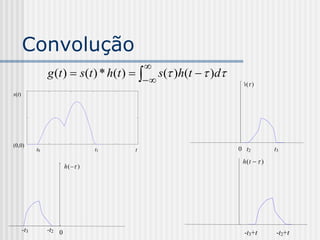
![Convolução
Observe que g(t) = 0 para
t [t0 t2 , t1 t3 ]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-152-320.jpg)
![Convolução Discreta Linear
Convolução linear entre s[n] e h[n]
g[n] s[n ] * h[n] s[ ]h[n ]
Se s[n] e h[n] têm N0 e N1 amostras,
respectivamente => extensão com zeros:
N 1
g[n] s[n] * h[n] s[ ]h[n ]
0
com N = N0 + N1 – 1.](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-153-320.jpg)
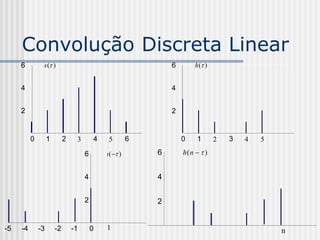
![Convolução Discreta Linear
6 s ( )
4
2
0 1 2 3 4 5
6
6 h ( )
4
g[0] = 3
2
-5 -4 -3 -2 -1 0 1 ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-155-320.jpg)
![Convolução Discreta Linear
6 s ( )
4
2
0 1 2 3 4 5
6
6 h (1 )
4
g[0] = 3
2
g[1] = 8
-5 -4 -3 -2 -1 0 1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-156-320.jpg)
![Convolução Discreta Linear
6 s[n] 6 h[n]
4 4
2 2
0 1 2 3 4 5 6 n 0 1 2 3 4 5 n
30 g[n] = s[n]* h[n]
20
10
0 1 2 3 4 5 6 7 8 9 10 11 n](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-157-320.jpg)
![Convolução Discreta Linear
s[n] Filtro g[n]
h[n]
g[n] s[n ] * h[n] s[ ]h[n ]
](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-158-320.jpg)
![Impulso Unitário
Delta de Dirac ou (t)
impulso unitário 1
contínuo
Duração = 0
Área = 1 0 t
[n]
Delta de Kronecker
ou impulso unitário 1
discreto
0 n](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-159-320.jpg)
![Sinais = somatório de
impulsos
Delta de Kronecker A[n-n0]
A
0 n0 n
s[n] s[0] [n] s[1] [n 1] .... s[ N 1] [n ( N 1)]
N 1
s[n] s[ ] [n ]
0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-160-320.jpg)
![Resposta ao impulso
Resposta de um filtro a s[n]:
N 1 N 1
g[ n] s[ ]h[n ] h[ ]s[n ]
0 0
Resposta de um filtro ao impulso
N 1 N 1
g[ n] [ ]h[n ] [n ]h[ ]
0 0
N 1
h[n] [n ]h[ ]
0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-161-320.jpg)
![Resposta ao impulso
h[n]:
Resposta ao impulso
Máscara convolucional
Kernel do filtro
Vetor de coeficientes do filtro](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-162-320.jpg)
![Filtros FIR
Finite Impulse Response
N 1
y[n] ak x[n k ]
k 0
ak h[k ]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-163-320.jpg)
![Filtros IIR
Infinite Impulse Response
N 1 M 1
y[n] ak x[n k ] bk y[n k ]
k 0 k 1
Filtros recursivos](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-164-320.jpg)
![Filtros IIR (exemplo)
Encontre a resposta ao impulso do
seguinte sistema recursivo. Supor que o
sistema está originalmente relaxado (y[n]
= 0 para n < 0)
y[n] = x[n] - x[n-1] – 0,5y[n-1]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-165-320.jpg)
![Filtros IIR (exemplo)
Exemplo:
y[n] = x[n] - x[n-1] – 0,5y[n-1]
y[0] = delta[0]–delta[-1]–0,5y[-1] = 1
y[1] = delta[1]–delta[0]–0,5y[0] = -1,5
y[2] = delta[2]–delta[1]–0,5y[1] = 0,75
y[3]= delta[3]–delta[2]–0,5y[2] = -0,325
y[n] = -0,5y[n-1], n > 1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-166-320.jpg)
![Filtros IIR (exemplo 2)
Exemplo: encontre a resposta ao impulso
do seguinte sistema recursivo. Supor que
o sistema está originalmente relaxado
(y[n] = 0 para n < 0)
y[n] - y[n-1] = x[n] - x[n-4]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-167-320.jpg)
![Filtros IIR (exemplo 2)
Exemplo (Solução)
y[n] = y[n-1] + x[n] - x[n-4]
y[0] = y[-1] + delta[0] - delta[-4] = 1
y[1] = y[0] + delta[1] - delta[-3] = 1
y[2] = y[1] + delta[2] - delta[-2] = 1
y[3] = y[2] + delta[3] - delta[-1] = 1
y[4] = y[3] + delta[4] - delta[0] = 0
y[5] = y[4] + delta[5] - delta[1] = 0
y[6] = y[7] = ... = 0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-168-320.jpg)
![Convolução Discreta Circular
Sinais s[n] e h[n] com N0 e N1 amostras,
respectivamente => extensão com zeros:
s[n ], 0 n N 0 h[n ], 0 n N1
s e [n ] he [n ]
0, N 0 n N 0, N1 n N
Extensão periódica: considera-se que
se[n] e he[n] são períodos de sp[n] e hp[n]
Convolução circular:
N 1
g p [n] s[n] h[n] s p [ ]h p [n ]
0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-169-320.jpg)
![Convolução Circular x Linear
Fazendo-se N = N0 + N1 – 1
s[n] h[n] s[n] * h[n]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-170-320.jpg)
![Convolução de Imagens
f[i, j] (R0xC0) e h[i, j] (R1xC1): extensão
por zeros
R 1 C 1
g[i, j ] f [i, j ] * h[i, j ] f [ , ]h[i , j ]
0 0
R 1 C 1
g p [i, j ] f [i, j ] h[i, j ] f p [ , ]h p [i , j ]
0 0
Iguais se R=R0+R1–1 e C=C0+C1–1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-171-320.jpg)

![Transformada z
Transformada z de x[n]:
Z{x[n]} X [ z ] x[n] z n
n
z: variável complexa](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-175-320.jpg)
![Propriedades da
Transformada z
Linearidade: Se x[n] = ax1[n] + bx2[n],
(a e b: constantes arbitrárias), então:
X [ z] aX1[ z] bX 2 [ z]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-176-320.jpg)
![Propriedades da
Transformada z
Deslocamento:
Z{x[n+k]} = zkX[z], k inteiro
Prova:
Z{x[n k ]} x[n k ]z n
n
Fazendo m = n+k:
Z{x[n k ]} x[m]z (n k ) z k x[m]z n z k X [ z ]
m m ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-177-320.jpg)
![Propriedades da
Transformada z
Convolução:
y[n] h[n] * x[n] h[k ]x[n k ] Y [ z] H [ z] X [ z]
k
Se h[n] é a resposta ao impulso de
um filtro, H[z] é a função de
transferência do filtro](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-178-320.jpg)
![Propriedades da
Transformada z
Convolução (Prova)
n
Z{h[n] * x[n]} h[k ]x[n k ] z
n k
h[k ]x[n k ]z n
k n
h[k ]z k x[n]z n
k n
H [ z] X [ z]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-179-320.jpg)
![Função de Transferência
Equação de diferenças de um filtro
N 1 M 1
y[n] ak x[n k ] bk y[n k ]
k 0 k 1
M 1 N 1
bk y[n k ] ak x[n k ]
k 0 k 0
b0 1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-180-320.jpg)
![Função de Transferência
Transformada Z da Equação de
diferenças
M 1
N 1
Z bk y[n k ] Z a k x[n k ]
k 0
k 0
M 1 N 1
bk Z{ y[n k ]} ak Z{ x[n k ]}
k 0 k 0
M 1 N 1
bk z k Y [ z ] ak z k X [z ]
k 0 k 0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-181-320.jpg)
![Função de Transferência
Aplicando a transformada z em
ambos os lados e simplificando:
N 1
ak z k
Y [ z] k 0
H [ z]
X [ z] M 1
1 bk z k
k 1
Pólos: raízes do denominador
Zeros: raízes do numerador
Pólos e zeros: estabilidade](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-182-320.jpg)
![Função de Transferência
BIBO: Bounded-input, bounded-
output
Sistemas BIBO-estáveis: sistemas
causais tais que:
| h[k ] |
k 0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-183-320.jpg)
![Estimação da Resposta em
Freqüência
Resposta em freq. a partir de H[z]
H [ z] h[n]z n
n
H [ e j ] h[n]e jn , 0 2
n
Comparar com
N 1 j 2un
1
F [u ]
N
s[n]e N
n 0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-184-320.jpg)
![Estimação da Resposta em
Freqüência
Exemplo: encontre a resposta em
freqüência do filtro y[n] = (x[n] + x[n-1])/2
utilizando a transformada Z
Y[z] = (X[z] + z-1X[z] )/2 = X[z](1+z-1)/2
H[z] = (1+z-1)/2
H[ejw] = (1+e-jw)/2 = e-jw/2 (ejw/2 + e-jw/2)/2 =
e-jw/2cos(w/2)
|H[ejw]| = cos(w/2), -pi< w < pi](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-185-320.jpg)
![Estimação da Resposta em
Freqüência
Exemplo: encontre a resposta em
freqüência do filtro y[n] = (x[n] - x[n-1])/2
utilizando a transformada Z
Y[z] = (X[z] - z-1X[z] )/2 = X[z](1-z-1)/2
H[z] = (1-z-1)/2
H[ejw] = (1-e-jw)/2 = e-jw/2 (ejw/2 - e-jw/2)/2 =
je-jw/2sen(w/2)
|H[ejw]| = |sen(w/2)|, -pi< w < pi](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-186-320.jpg)
![Correlação
Convolução:
g[n] s[n ] * h[n] s[ ]h[n ]
Correlação:
g[n] s[n] h[n] s[ ]h[ n]
Quando um dos sinais é par,
correlação = convolução](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-187-320.jpg)
![Correlação
Exemplo:
h[-1] = 3; h[0] = 7; h[1] = 5;
s[0..15] = {3, 2, 4, 1, 3, 8, 4, 0, 3, 8, 0,
7, 7, 7, 1, 2}
Extensão com zeros](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-188-320.jpg)
![Correlação
Exemplo:
g[1] s[0]h[1] 15
1
g[0] s[ ]h[ ] s[0]h[0] s[1]h[1] 31
0
2
g[1] s[ ]h[ 1] s[0]h[1] s[1]h[0] s[2]h[1] 43
0
3
g[2] s[ ]h[ 2] s[1]h[1] s[2]h[0] s[3]h[1] 39
1
...](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-189-320.jpg)
![Correlação
Exemplo:
g[0..15] = 31, 43, 39, 34, 64, 85, 52, 27,
61, 65, 59, 84, 105, 75, 38, 27
Observe que g[5] é elevado, pois é
obtido centrando h em s[5] e calculando
a correlação entre (3, 7, 5) e (3, 8, 4)
Mas g[12] é ainda maior, devido aos
valores elevados de s[11..13]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-190-320.jpg)
![Correlação Normalizada
A correlação normalizada elimina a
dependência dos valores absolutos
dos sinais:
s[ ]h[ n]
g[n] s[n] h[n]
( s[ ]) 2 (h[ n]) 2
](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-191-320.jpg)
![Correlação Normalizada
Resultado para o exemplo anterior:
g[0..15] = .??? .877 .934 .73 .81
.989 .64 .59 .78 .835 .61 .931 .95
.83 .57 .???
Valor máximo: g[5]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-192-320.jpg)
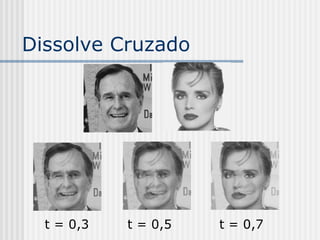
![Dissolve Cruzado
ht (i, j)= (1 - t) f(i, j) + t g(i, j)
t é um escalar no intervalo [0, 1]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-205-320.jpg)
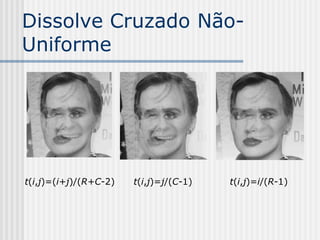
![Dissolve Cruzado Não-
Uniforme
ht(i, j)= [1 - t(i, j)] f(i, j) + t(i, j) g(i, j)
t é uma matriz com as mesmas
dimensões de f e g cujos elementos
assumem valores no intervalo [0, 1]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-207-320.jpg)
![Redução de Ruído por Média
de Imagens
f[i, j] imagem sem ruído
nk(i, j) ruído de média m
gk[i,j] = f[i,j] + nk(i,j)
M
1
g [i, j ] g k [i, j ]
M k 1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-210-320.jpg)
![Redução de Ruído por Média
de Imagens
M
1
g [i, j ] ( f [i, j ] nk (i, j ))
M k 1
M
1
g [i, j ] f [i, j ] nk (i, j )
M k 1
Para M grande:
g[i, j ] f [i, j ] m](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-211-320.jpg)

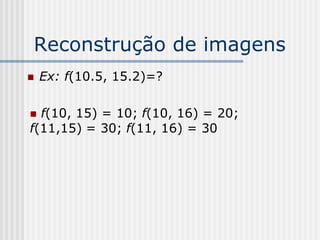
![Reconstrução de imagens
Dados f(i,j), f(i,j+1), f(i+1,j), f(i+1,j+1)
(i, j) (i, y) (i, j+1)
Reconstrução:
Encontrar f(x,y), (x,y)
x em [i, i+1]
y em [j, j+1]
(i+1, j) (i+1, y) (i+1, j+1)](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-221-320.jpg)
![Reconstrução de imagens
por interpolação bilinear
f(i, y) = f(i, j)+(y–j)[f(i, j+1)-f(i, j)]
f(i+1,y)=f(i+1,j)+(y–j)[f(i+1,j+1)-f(i+1, j)]
f(x, y) = f(i, y) + (x – i) [f(i+1, y) - f(i, y)]
(i, j) (i, y) (i, j+1)
(x,y)
(i+1, j) (i+1, y) (i+1, j+1)](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-222-320.jpg)
![Reconstrução de imagens
Solução:
x = 10.5; y = 15.2 => i = 10; j = 15
f(i, y) = f(i, j)+(y–j)[f(i, j+1)-f(i, j)]
f(10, 15.2)=f(10,15)+(15.2-15)*[f(10,16)-f(10,15)
= 10 + 0.2*[20 – 10] = 12
f(i+1,y)=f(i+1,j)+(y–j)[f(i+1,j+1)-f(i+1, j)]
f(11, 15.2)=f(11,15)+(15.2-15)*[f(11,16)-f(11,15)
=30 + 0.2*[30 – 30] = 30
f(x, y) = f(i, y) + (x–i) [f(i+1, y) - f(i, y)]
f(10.5, 15.2)=12+(10.5-10)*[30-12] =21](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-224-320.jpg)
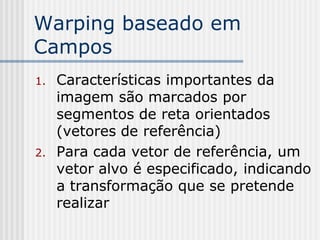
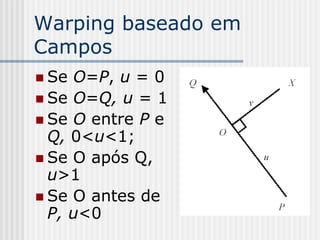
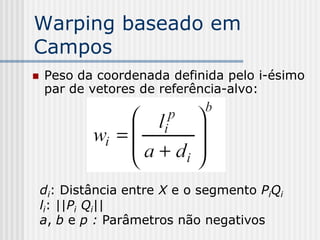
![Warping baseado em
Campos
Parâmetro v:
PX . PQ
v
|| PQ ||
v = (x-xp)(yq-yp) + (y-yp)(xp–xq)
[(xq-xp)2 + (yq-yp)2]1/2](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-241-320.jpg)
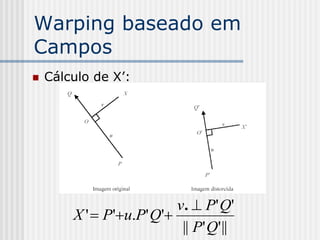
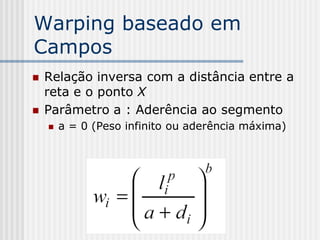
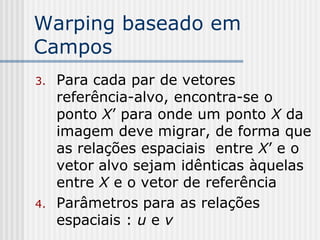
![Warping baseado em
Campos
Exemplo:
P0 = (40, 10); Q0 = (20, 5)
P0’ = (35, 15); Q0’ = (25, 20) 0 5 10 15 20 25 30 35 40 45 50 55 60
P1 = (20, 30); Q1 = (10, 35) 0
Q1‟
P1’ = (25, 50); Q1’ = (5, 40) 5
Q1
X = (20, 25) 10
u0 = [(20-40) (20-40) + (25- 15
10)(5-10)] / [(20-40)2+ X
(5-10)2] = 0.76
20 Q0
P1
v0 = [(20-40) (5-10) + (25- 25 Q0‟
P1‟
10)(40-20)] / [(20-40)2+ 30
(5-10)2]1/2 = 19.40
35
X0’ = (35, 10) + 0.76 (25-35, P0‟
20-15) + 19.4 (20-15, 35- 40
P0
X0‟
25) / [(25-35)2 + (20- 45
15)2]1/2
X0’ = (36.03, 31.17) 50](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-251-320.jpg)
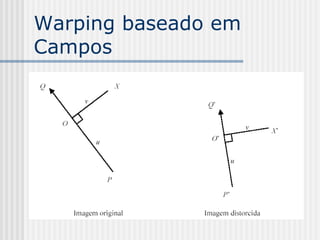
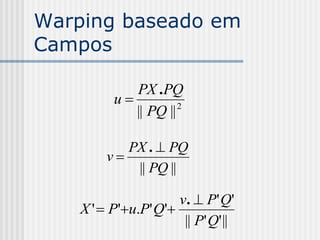
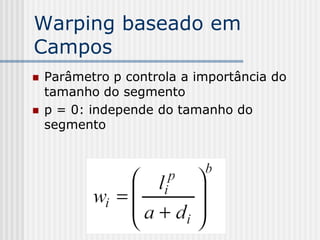
![Warping baseado em
Campos
Exemplo (cont):
u1 = [(20-20) (10-20) +
(25-30)(35-30)] / [(10-
20)2+ (35-30)2] = - 0.2 0 5 10 15 20 25 30 35 40 45 50 55 60
v1 = [(20-20) (35-30) + 0
(25-30)(20-10)] / [(10- 5 Q1‟
20)2+ (35-30)2]1/2 = - 10
Q1
4,47
15
X1’ = (25, 50) - 0.2 (5-25, X
40-50) -4,47 (40-50, 20 Q0
25-5) / [(25-5)2 + (40- 25 Q0‟
P1
50)2]1/2 P1‟
X1’ = (25, 50) + (4.6, 2) + 30
(2, -3.99) = (31.6, 35 X1‟
48,01) 40
P0‟ X0‟
P0
45
50](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-252-320.jpg)
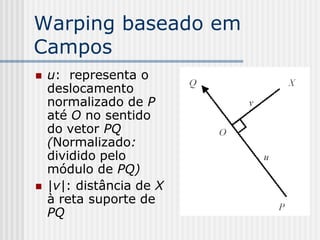
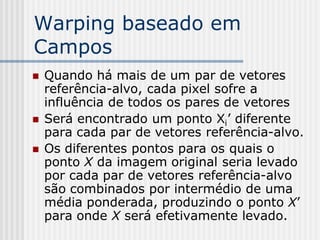
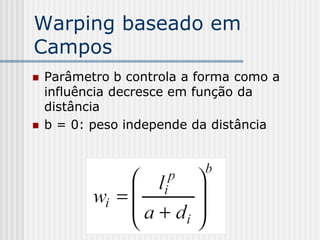
![Warping baseado em
Campos
Exemplo (cont):
Dados a = 0.1; b = 2; p= 0
wi = 1/[0.1+di]2
d0 = v0 = 19.4 => w0 =
0 5 10 15 20 25 30 35 40 45 50 55 60
0.0026
0
5 Q1‟
d1 = distância de X a P1 = Q1
[(20-20)2 + (25-30)2]1/2 10
= 5 =>: w1 = 0.0384 15
X’ = [0.0026* (36.03, 20 Q0
X
31.17) + 0.0384*(31.6, P1
48,01)]/( 0.0026+ 25 Q0‟
P1‟
0.0384) 30 X‟
X’ = (31.88, 46,94) X1‟
35
P0‟ X0‟
40
P0
45
50](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-253-320.jpg)
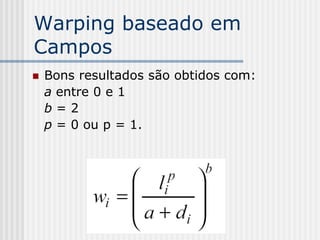
![Uma Família de Funções
Cosseno Discretas
x k [n] Ak cos2f k n k , n 0,1,...,N 1
k = 0,1,...N-1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-262-320.jpg)
![Uma Família de Funções
Cosseno Discretas
1/ 2
2
Ak ck X k
N
1/2 1/2
para k 0
ck
1
para k 1, 2, ... N - 1
k 2N k
fk Tk k
2N k 2N
1/ 2
2 (2n 1)k
x k [n ] c k X k cos , n 0,1,...,N 1
N 2N ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-263-320.jpg)
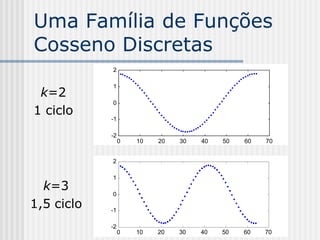
![Uma Família de Funções
Cosseno Discretas
1/ 2
2 (2n 1)k
x k [n ] c k X k cos , n 0,1,...,N 1
N 2N
f0 0 1/ 2
2 1
1/ 2
k 0 x0[n] X 0 , n 0,1,...,N 1
0 0 N 2
1
k 1 f1 T1 2 N (meio-período em N amostras)
2N
N 1 2N
k N 1 f N 1 TN 1
2N N 1](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-264-320.jpg)
![Uma Família de Funções
Cosseno Discretas
xk[n] (N = 64, Xk = 10).
2
1
0
-1
-2
0 10 20 30 40 50 60 70
k=1
Meio-ciclo](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-265-320.jpg)
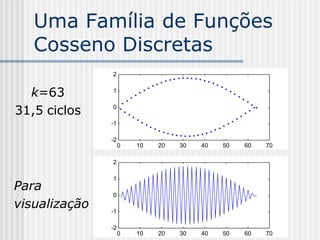
![Somando Cossenos
Discretos
Criar um sinal x[n] somando-se os sinais
xk[n], k = 0...N-1, amostra a amostra:
N 1
x[n] x k [n], n 0,1,...,N 1
k 0
1 / 2 N 1
2 (2n 1)k
x[n ] ck X k cos 2 N , n 0,1,...,N 1
N k 0 ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-270-320.jpg)
![Somando Cossenos
Discretos
Exemplo:
N = 8; X0 = 10; X1 = 5; X2 = 8,5; X3 = 2;
X4 = 1; X5 = 1,5; X6 = 0; X7 = 0,1.
5
1/ 2
11
4 x 0 [n ] 10
22
3 =3.5355
2
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-271-320.jpg)
![Somando Cossenos
Discretos
X1 = 5
4 5 (2n 1)
x1 [n ] cos
2
2 16
0
=2.4520; 2.0787; 1.3889;
-2
0.4877; -0.4877; -1.3889;
-4
0 2 4 6 8
-2.0787; -2.4520
6
4
x0[n]+x1[n]
2
0
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-272-320.jpg)
![Somando Cossenos
Discretos
X2 = 8,5
8.5 (2n 1)2
x 2 [n ]
4
cos
2
2 16
0
= 3.9265; 1.6264; -1.6264;
-2
-3.9265; -3.9265; -1.626;
-4
0 2 4 6 8
1.6264; 3.9265
10
5
x0[n]+x1[n] +x2[n]
0
-5
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-273-320.jpg)
![Somando Cossenos
Discretos
X3 = 2
1 2 (2n 1)3
x 3 [n ] cos
0.5 2 16
0
= 0.8315; -0.1951; -0.9808;
-0.5
-0.5556; 0.5556; 0.9808;
-1
0 2 4 6 8
0.1951; -0.8315
15
10
5 x0[n]+x1[n]+x2[n]+x3[n]
0
-5
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-274-320.jpg)
![Somando Cossenos
Discretos
X4 = 1
0.4
1 (2n 1)4
x 4 [n ] cos
0.2
2 16
0
= 0.3536; -0.3536; -0.3536;
-0.2
0.3536; 0.3536; -0.3536;
-0.4
0 2 4 6 8
-0.3536; 0.3536
15
10
5 x0[n]+x1[n]+x2[n]+x3[n]
0 +x4[n]
-5
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-275-320.jpg)
![Somando Cossenos
Discretos
X5 = 1,5
1
1.5 (2n 1)5
x 5 [n ] cos
0.5
2 16
0
-0.5
= 0.4167 -0.7356 0.1463
0.6236 -0.6236 -0.1463
-1
0 2 4 6 8 0.7356 -0.4167
15
10
5 x0[n]+x1[n]+x2[n]+x3[n]
0 +x4[n]+x5[n]
-5
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-276-320.jpg)
![Somando Cossenos
Discretos
X6 = 0
0 (2n 1)6
x 6 [n ] cos
1
0.5 2 16
=0
0
-0.5
-1
0 2 4 6 8
15
10
5 x0[n]+x1[n]+x2[n]+x3[n]
0 +x4[n]+x5[n]+x6[n]
-5
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-277-320.jpg)
![Somando Cossenos
Discretos
X7 = 0,1
0.1 (2n 1)7
x 7 [n ]
0.05
cos
2 16
0
= 0.0098; -0.0278; 0.0416;
-0.0490’; 0.0490; -0.0416;
-0.05
0 2 4 6 8
0.0278; -0.0098
15
10
5 x[n]=x0[n]+x1[n]+x2[n]+
0 x3[n] +x4[n]+x5[n]+x6[n]
-5
+x7[n]
0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-278-320.jpg)
![Somando Cossenos
Discretos
X[k] é um sinal digital: X[k]= X0, X1,...XN-1
Exemplo: X[k]=10;5;8.5;2;1;1.5;0;0.1
Dado X[k] pode-se obter x[n]
X[k]: representação alternativa para x[n]
X[k] x[n]
10 15
10
5 5
0
0 -5
0 2 4 6 8 0 2 4 6 8](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-279-320.jpg)
![Somando Cossenos
Discretos
xk[n]: cosseno componente de x[n],
de freqüência fk = k/2N; ou
xk[n]: componente de freqüência
fk = k/2N;
X[k]: Diretamente relacionado com a
amplitude da componente de
freqüência fk = k/2N
X[k] representa a importância da
componente de freqüência fk = k/2N](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-280-320.jpg)
![Transformada Cosseno
Discreta (DCT)
DCT de x[n]:
1/ 2 N 1
2 (2n 1)k
X [k ] ck x[n] cos , k 0,1,...,N 1
N n 0 2N
Transformada DCT inversa (IDCT) de
X[k]:
1 / 2 N 1
2 (2n 1)k
x[n] ck X [k ] cos 2 N , n 0,1,...,N 1
N k 0 ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-281-320.jpg)
![Transformada Cosseno
Discreta (DCT)
X[k]: coeficientes DCT
X: representação de x no domínio da
freqüência
X[0]: coeficiente DC (Direct Current)
X[1]...X[N-1]: coeficientes AC
(Alternate Current)
Complexidade
Algoritmos eficientes: FDCT](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-282-320.jpg)
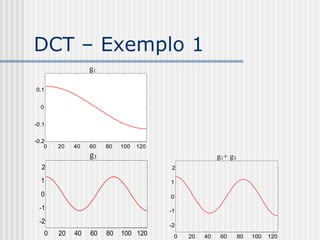
![DCT – Exemplo 2
60 1 π
f1[n] 29.99 cos 2 π n
40 2N 2N
20
0
-20
-40
-60
0 10 20 30 40 50 60
60 2 π 150 f1 f 2
f 2 [n] 48.54 cos 2 π n
40 2N 2N
100
20
50
0
-20 0
-40 -50
-60
-
0 10 20 30 40 50 60 0 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-285-320.jpg)
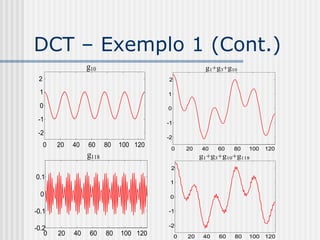
![DCT – Exemplo 2 (Cont.)
60 3 π 150 f1 f 2 f 3
f 3 [n] 34.23 cos 2 π n
40 2N 2N
100
20
50
0
-20 0
-40 -50
-60
-
0 10 20 30 40 50 60 1000 10 20 30 40 50 60
60 4 π 150 f1 f 2 ... f 4
f 4 [n] -35.19 cos 2π n
40 2N 2N
100
20
50
0
-20 0
-40 -50
-60
-
0 10 20 30 40 50 60 0 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-286-320.jpg)
![DCT – Exemplo 2 (Cont.)
150
60 5 π f 1 f 2 ... f 6
f 5 [n] -34.55 cos 2π n
40 2N 2N 100
20 50
0 0
-20
-50
-40
-
-60 100
0 10 20 30 40 50 60 0 10 20 30 40 50 60
150
60 6 π f 1 f 2 ... f 6
f 6 [n] -33.29 cos 2 π n
40 2N 2N 100
20 50
0
0
-20
-50
-40
-60 -
100
0 10 20 30 40 50 60 0 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-287-320.jpg)
![DCT – Exemplo 2 (Cont.)
200
60 7 π f 1 f 2 ... f 7
f 7 [n] -63.42 cos 2π n 150
40 2N 2N
100
20
50
0
0
-20
-40 -50
-60 -
1000 10 20 30 40 50 60
0 10 20 30 40 50 60
60 8 π f1 f 2 ... f 8
f 8 [n] -42.82 cos 2π n 200
40 2N 2N
150
20
100
0
50
-20
0
-40
-50
-60
-
0 10 20 30 40 50 60 100](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-288-320.jpg)
![DCT – Exemplo 2 (Cont.)
60 9 π f1 f 2 ... f 9
f 9 [n] -10.31cos 2 π n 200
40 2N 2N
150
20 100
0 50
-20 0
-40 -50
-60 -
0 10 20 30 40 50 60 1000 10 20 30 40 50 60
60 10 π f1 f 2 ... f10
f10 [n] 7.18 cos 2 π n 200
40 2N 2N
150
20 100
0 50
-20 0
-40 -50
-60 -
0 10 20 30 40 50 60 1000 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-289-320.jpg)
![DCT – Exemplo 2 (Cont.)
600
60 20 π f 1 f 2 ... f 20
f 20 [n] -62.24 cos 2π n
40 2N 2N
400
20
0 200
-20
0
-40
-60
-
0 10 20 30 40 50 60 2000 10 20 30 40 50 60
60 40 π 100 f1 f 2 ... f 40
f 40 [n] 35.54 cos 2 π n
40 2N 2N 0
800
20 600
0 400
-20 200
-40 0
-60 -
200
0 10 20 30 40 50 60 0 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-290-320.jpg)
![DCT – Exemplo 2 (Cont.)
60 60 π 120 f1 f 2 ... f 60
f 60 [n] -6.73 cos 2π n 0
40 2N 2N 100
0800
20
600
0
400
-20 200
-40 0
-60 -
0 10 20 30 40 50 60 2000 10 20 30 40 50 60
60 63 π 120 f1 f 2 ... f 63
f 63 [n] -1.51cos 2 π n
2N 2N 0
100
40
0800
20
600
0
400
-20
200
-40 0
-60 -
0 10 20 30 40 50 60 2000 10 20 30 40 50 60](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-291-320.jpg)
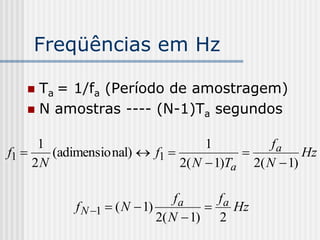
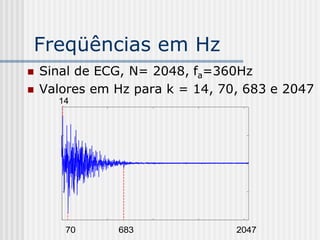
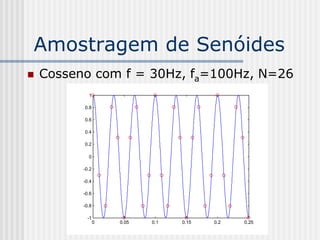
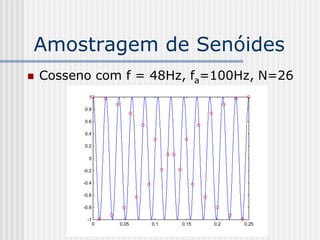
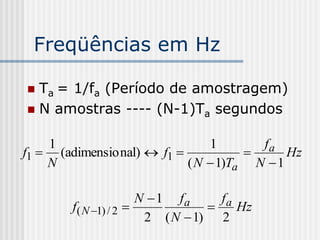
![Freqüências em Hz
f1 = fa/[2(N-1)] Hz = 360/(2x2047) =
0,087933561
f14 = 14f1 = 1,23 Hz
f70 = 70f1 = 6,16 Hz
f683 = 683f1 = 60,06 Hz
f2047 = 2047f1 = 180 Hz](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-297-320.jpg)
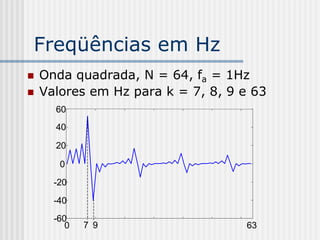
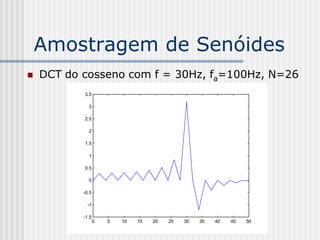
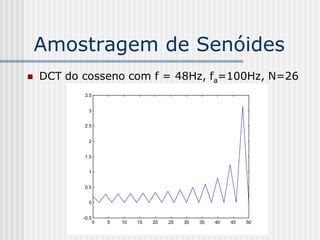
![Freqüências em Hz
f1 = fa/[2(N-1)] Hz = 1/(2x63) =
0,007936507
f7 = 7f1 = 0,0556 Hz
f8 = 8f1 = 0,0625 Hz
f9 = 9f1 = 0,0714 Hz
f63 = 63f1 = 0,5 Hz
Obs:
Período do sinal = 16 s
Freqüência da onda = 0,0625](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-300-320.jpg)

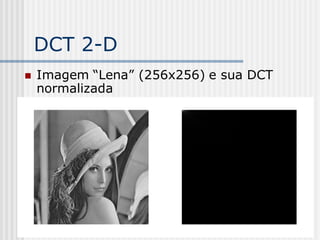
![DCT 2-D
Operação separável
Complexidade elevada
N 1 N 1
1 (2m 1)k (2n 1)l
X [k , l ] ck cl x[m, n] cos cos 2 N
2N m 0 n 0 2N
1 N 1N 1 (2k 1)m (2l 1)n
x[m, n] ck cl X [k , l ] cos 2 N cos 2 N
2 N k 0 l 0 ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-327-320.jpg)
![Transformada de Fourier
Discreta (DFT)
N 1 j 2un
1
Direta: F [u ]
N
s[n]e N
n 0
N 1 j 2un
Inversa: s[n ] F [u]e N
u 0
n, u = 0, 1, ..., N-1
j 1
Fórmula de Euler: e j cos j sen ](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-334-320.jpg)
![Duas propriedades
essenciais
F [u N ] ?
|F[-u]| = ?](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-335-320.jpg)
![Duas propriedades
essenciais
DFT é periódica de período N:
F [u N ] F (u)
Espectro de Fourier é função par:
|F[u]| = |F[-u]|](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-336-320.jpg)
![Esboço do Espectro de
Fourier
|F[u]|
u
-N/2 N/2 N-1
u = 0, N, 2N,...: freq. 0
u = N/2, 3N/2,...: freq. máxima (N par)
u = (N-1)/2,...: freq. máxima (N ímpar)](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-337-320.jpg)
![Fourier 2-D
Operação separável
Complexidade elevada
C 1 R 1
1
F [u, v ]
RC
s[m, n]e j 2 ( um / C vn / R )
m 0n 0
C 1 R 1
s[m, n] F [u, v]e j 2 ( um / C vn / R )
u 0 v 0](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-339-320.jpg)
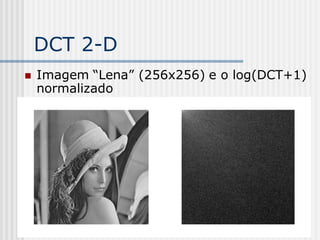
![Exibição do Espectro de
Fourier 2-D
Flog[u, v] = round[(L - 1) log(1+|F[u, v]|)/Fmax2]](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-340-320.jpg)
![Teorema da Convolução
Se
g[m, n] s[m, n] h[m, n]
Então:
G[u,v] = H[u,v]F[u,v]
onde
G[u,v]: DFT de g[m,n]
F[u,v]: DFT de s[m,n]
H[u,v]: DFT de h[m,n]
H[u,v]: Função de transferência do filtro](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-341-320.jpg)
![Filtros: espaço x freqüência
Projeto de filtro no domínio da freqüência
(Fourier)
Método imediato: H[k], k = 0..N-1
Como filtrar sinais no domínio do tempo,
em tempo real?
Convolução com h[n], n = 0..N-1 pode ser
proibitiva para n grande
Encontrar ht[n], n = 0..M-1, com M < N,
de modo a obter uma aproximação
adequada para H[k].](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-342-320.jpg)
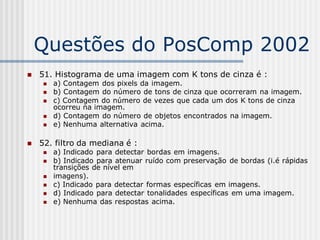
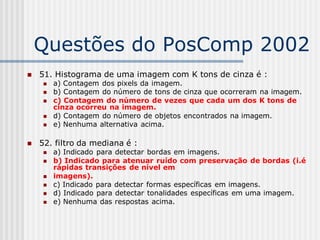
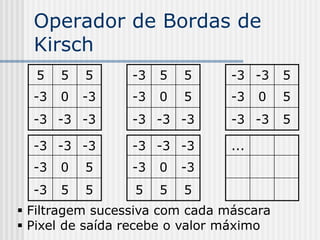
![Questões do PosComp 2006
47. [TE] Considere os filtros espaciais da média (m) e Mediana (M)
aplicados em imagens em níveis de cinza f e g. Qual par de termos ou
expressões a seguir não está associado, respectivamente, a características
gerais de m e M?
(a) m(f + g) = m(f) + m(g); M(f + g) != M(f) + M(g)
(b) ruído gaussiano; ruído impulsivo
(c) convolução; filtro estatístico da ordem
(d) preservação de pequenos componentes; não preservação de pequenos
componentes
(e) filtragem com preservação de contornos; filtragem sem preservação de
contornos
48. [TE] A convolução da máscara [-1 2 -1] com uma linha de uma
imagem contendo uma seqüência de pixels do tipo [... 3 4 5 6 7 8 9 10 ...]
resulta na transformação (sem considerar efeitos de borda):
(a) [...3 4 5 6 7 8 9 10...] e representa o filtro da média com 2-vizinhos mais
próximos
(b) [...0 0 0 0 0 0 0 0...] e representa o laplaciano no espaço discreto
(c) [...0 0 0 0 0 0 0 0...] e representa uma erosão morfológica
(d) [...1 1 1 1 1 1 1 1...] e é equivalente a um filtro passa-baixas
(e) [...7 9 11 13 15 17 19...] e é equivalente a um filtro passa-altas](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-350-320.jpg)
![Questões do PosComp 2006
47. [TE] Considere os filtros espaciais da média (m) e Mediana (M)
aplicados em imagens em níveis de cinza f e g. Qual par de termos ou
expressões a seguir não está associado, respectivamente, a características
gerais de m e M?
(a) m(f + g) = m(f) + m(g); M(f + g) != M(f) + M(g)
(b) ruído gaussiano; ruído impulsivo
(c) convolução; filtro estatístico da ordem
(d) preservação de pequenos componentes; não preservação de pequenos
componentes
(e) filtragem com preservação de contornos; filtragem sem preservação de
contornos
48. [TE] A convolução da máscara [-1 2 -1] com uma linha de uma
imagem contendo uma seqüência de pixels do tipo [... 3 4 5 6 7 8 9 10 ...]
resulta na transformação (sem considerar efeitos de borda):
(a) [...3 4 5 6 7 8 9 10...] e representa o filtro da média com 2-vizinhos mais
próximos
(b) [...0 0 0 0 0 0 0 0...] e representa o laplaciano no espaço discreto
(c) [...0 0 0 0 0 0 0 0...] e representa uma erosão morfológica
(d) [...1 1 1 1 1 1 1 1...] e é equivalente a um filtro passa-baixas
(e) [...7 9 11 13 15 17 19...] e é equivalente a um filtro passa-altas](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-351-320.jpg)
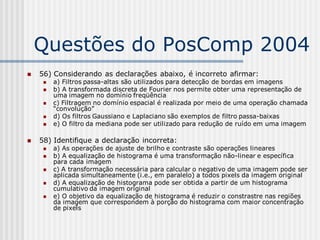
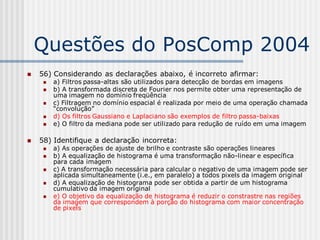
![Questões do PosComp 2007
61. [TE] O realce de imagem tem como objetivo destacar detalhes
finos procurando obter uma representação mais adequada do que
a imagem original para uma determinada aplicação. Dessa forma,
sobre as técnicas utilizadas no realce de imagens, é CORRETO
afirmar que
(a) o melhor resultado obtido depende do filtro aplicado na imagem.
Normalmente, o mais aplicado é o filtro da mediana.
(b) o melhor resultado é obtido com a aplicação de filtros passa-
baixas, cujos parâmetros dependem do resultado desejado.
(c) a aplicação de filtros da média sempre oferece resultado adequado
no realce de imagens.
(d) o resultado mais adequado no realce de imagens está associado à
aplicação de filtro passa-altas e da interpretação subjetiva do
observador que deverá ter conhecimento a priori da imagem original.
(e) o resultado mais adequado no realce de imagens está associado à
aplicação de filtro passa-baixas e da interpretação subjetiva do
observador que deverá ter conhecimento a priori da imagem original.
62 e 63](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-352-320.jpg)
![Questões do PosComp 2007
61. [TE] O realce de imagem tem como objetivo destacar detalhes
finos procurando obter uma representação mais adequada do que
a imagem original para uma determinada aplicação. Dessa forma,
sobre as técnicas utilizadas no realce de imagens, é CORRETO
afirmar que
(a) o melhor resultado obtido depende do filtro aplicado na imagem.
Normalmente, o mais aplicado é o filtro da mediana.
(b) o melhor resultado é obtido com a aplicação de filtros passa-
baixas, cujos parâmetros dependem do resultado desejado.
(c) a aplicação de filtros da média sempre oferece resultado adequado
no realce de imagens.
(d) o resultado mais adequado no realce de imagens está associado à
aplicação de filtro passa-altas e da interpretação subjetiva do
observador que deverá ter conhecimento a priori da imagem original.
(e) o resultado mais adequado no realce de imagens está associado à
aplicação de filtro passa-baixas e da interpretação subjetiva do
observador que deverá ter conhecimento a priori da imagem original.](https://image.slidesharecdn.com/pdi2007slides-090704141610-phpapp01/85/slides-PDI-2007-leonardo-353-320.jpg)

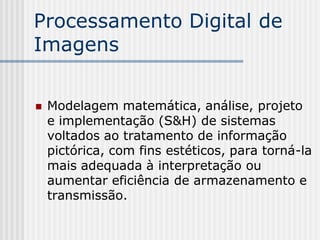
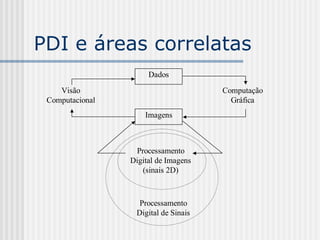
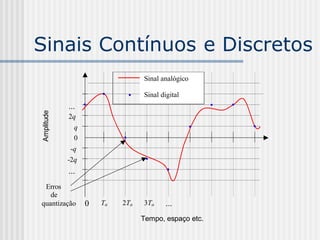
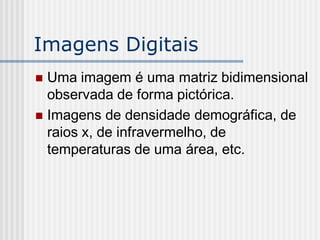
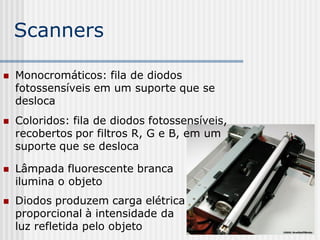
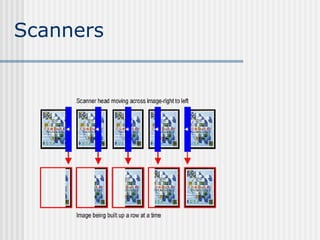
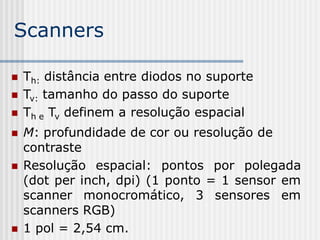
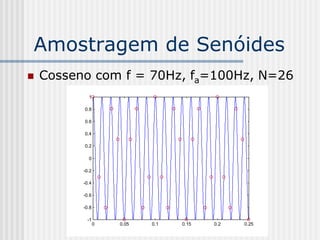
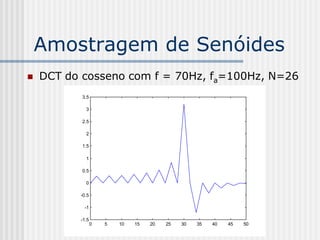
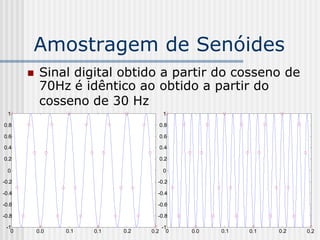
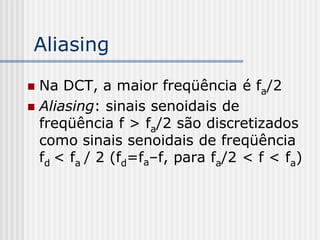
Este documento introduz o Processamento Digital de Imagens, definindo-o como a modelagem, análise, projeto e implementação de sistemas voltados ao tratamento de informação pictórica com fins estéticos ou de eficiência. Em seguida, apresenta as áreas correlatas ao PDI e exemplos de aplicações de imagens digitais antes de explicar conceitos-chave como amostragem, quantização, sistemas de cores e estrutura do olho humano.














































