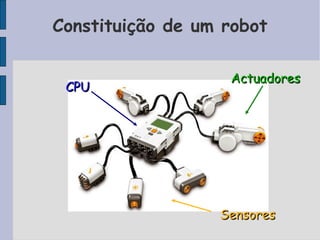
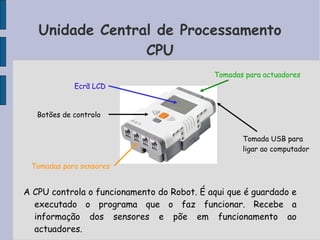
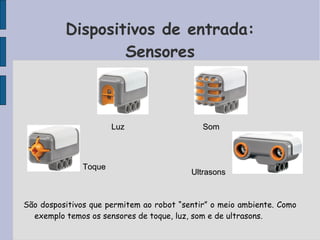
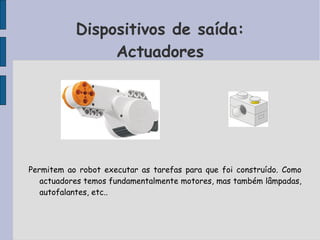
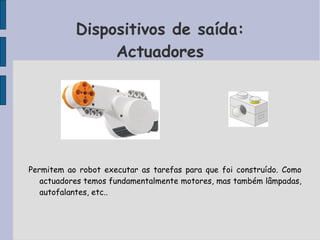
Este documento descreve os componentes básicos de um robô, incluindo a unidade central de processamento (CPU), sensores e atuadores. A CPU controla o funcionamento do robô, executando programas e recebendo dados dos sensores para controlar os atuadores. Os sensores permitem ao robô detectar o ambiente envolvente através da luz, som, toque e ultrassom. Já os atuadores, como motores, lâmpadas e alto-falantes, permitem ao robô executar tarefas por meio da programação.