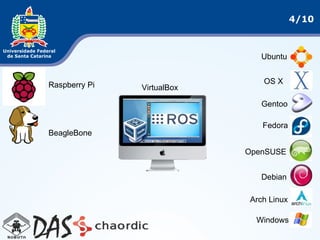
O documento descreve o Robot Operating System (ROS), um framework open-source para robótica. O ROS suporta vários sistemas operacionais e foi lançado pela primeira vez em 2007, com novas versões lançadas a cada ano. Ele fornece ferramentas para controle de movimento, percepção e navegação para robôs móveis.