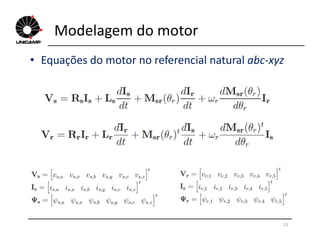
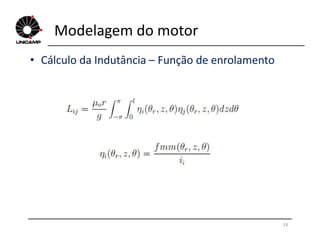
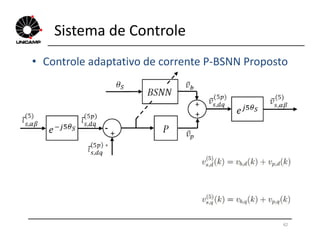
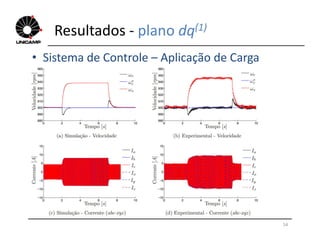
Este trabalho apresenta a modelagem de um motor de indução hexafásico assimétrico e o desenvolvimento de um controlador adaptativo P-BSNN para reduzir os harmônicos de corrente no motor. O modelo do motor é desenvolvido nos referenciais natural abc-xyz e síncrono dq e seus parâmetros são obtidos experimentalmente. Um controlador P-BSNN é proposto para controlar a corrente no plano dq(5) e reduzir os harmônicos de corrente. Os resultados experimentais mostram que o controlador P-BSNN tem melhor desempenho na
![Modelagem do motor
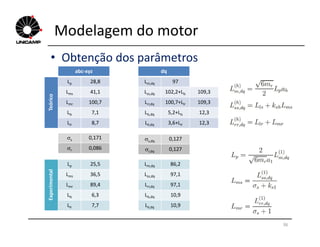
• Obtenção dos parâmetrosHarmônico
Parâmetros Ensaio a vazio Rotor bloqueado
Tensão [V] 126,7 49,6
Corrente [A] 3,46 6,44
Potência Ativa [W] 528,2
Potência Reativa [VAr] 2628,7 1845,8
35
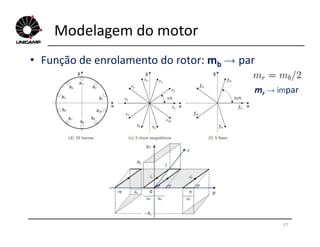
1ª
Potência Reativa [VAr] 2628,7 1845,8
Indutância [mH] 97,1 16,6
Resistência [Ω] 2,1
5ªHarmônico
Parâmetros r = 900 rpm r = 0 rpm
Tensão [V] 42 42
Corrente [A] 2,13 2,11
Potência Reativa [VAr] 449 468,5
Indutância [mH] 8,8 9,3](https://image.slidesharecdn.com/d415887e-3f96-4958-8aec-facc105dee74-160911110321/85/Dainez_Tese_Apresentacao-35-320.jpg)
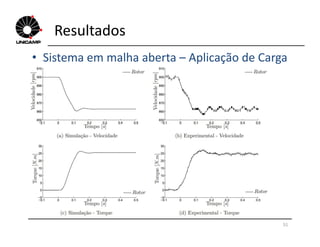


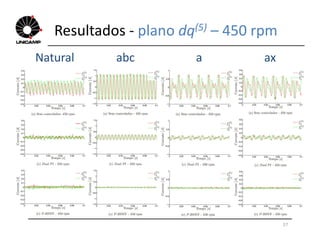
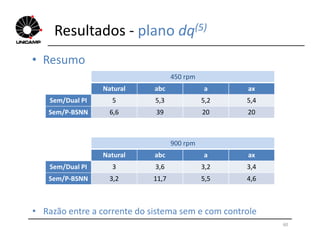
![Resultados - plano dq(5)
• Resumo
450 rpm
Natural abc a ax
Sem 0,1 0,78 0,33 0,28
Dual PI 0,02 0,15 0,06 0,05
P-BSNN 0,015 0,02 0,016 0,014
59
P-BSNN 0,015 0,02 0,016 0,014
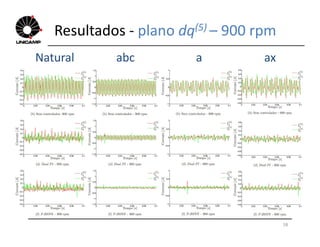
900 rpm
Natural abc a ax
Sem 0,15 0,49 0,22 0,23
Dual PI 0,05 0,14 0,07 0,07
P-BSNN 0,045 0,042 0,04 0,049
• Corrente |Idq
(5)| [A]](https://image.slidesharecdn.com/d415887e-3f96-4958-8aec-facc105dee74-160911110321/85/Dainez_Tese_Apresentacao-59-320.jpg)