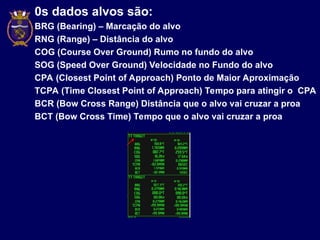
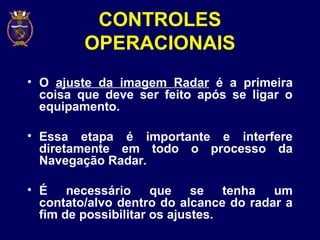
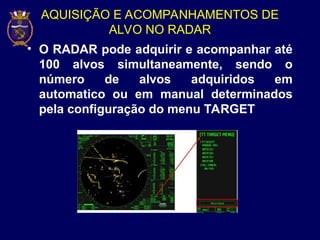
O curso visa capacitar os alunos na utilização e operação do equipamento radar para determinar a posição de embarcações e alvos. Os alunos aprenderão a ajustar controles, operar diferentes modos de apresentação e medir distâncias, além de entender a navegação em relação a vários fatores como condições climáticas e características de alvos. O domínio da tecnologia de radar é enfatizado como essencial para a segurança na navegação.


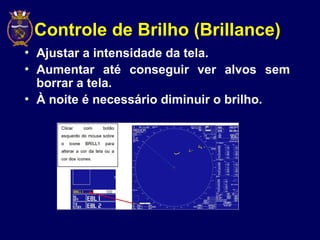


![• Para que os dados do alvo acompanhados
estejam disponíveis na tela [TT TARGET],
coloque o mouse sobre o alvo e pressione a tecla
"T". O alvo selecionado ficará como na figura
abaixo e as informações estarão disponíveis na
área de informações do menu, à direita da tela. É
possível o acompanhamento de informações de
até 4 contatos simultaneamente.](https://image.slidesharecdn.com/0002-epor-funodoscontrolesdeoperaodoradar-241129004226-a9c133df/85/0002-EPOR-Funcao-dos-Controles-de-Operacao-do-Radar-ppt-48-320.jpg)